ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к установке для испытаний колес.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] Известно испытательное устройство, предназначенное для имитационного моделирования и исследования взаимодействия между рельсом и колесом во время движения железнодорожного транспортного средства. Например, в публикации предварительной заявки на патент Японии №2007-271447 (патентном документе 1) раскрыта испытательная установка, выполненная с возможностью проведения испытания, имитирующего состояние движения железнодорожного транспортного средства посредством вращения как колеса, имитирующего рельс (rail wheel), которое представляет собой дискообразный элемент с формой поперечного сечения, наружная периферийная часть которого имитирует рельс, так и колеса в состоянии, в котором колесо поджато к колесу, имитирующему рельс.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Поскольку испытательная установка, раскрытая в патентном документе 1, приводится в действие посредством одного электродвигателя, при выполнении испытания для приложения большого крутящего момента к колесу при вращении колеса с высокой скоростью необходимо использовать электродвигатель большой мощности, и поэтому существует проблема, заключающаяся в том, что потребление энергии во время испытания становится огромным.
[0004] Настоящее изобретение было сделано с учетом вышеприведенных обстоятельств, и задачей настоящего изобретения является уменьшение энергопотребления установкой для испытаний колес.
[0005] В соответствии с вариантом осуществления настоящего изобретения предложена установка для испытаний колес, включающая в себя опорное устройство для колеса, имитирующего рельс, выполненное с возможностью обеспечения опоры для колеса, имитирующего рельс, с возможностью его вращения, опорное устройство для колеса, выполненное с возможностью обеспечения опоры для испытываемого колеса с возможностью его вращения в состоянии, в котором испытываемое колесо находится в контакте с колесом, имитирующим рельс, первый электродвигатель, выполненный с возможностью обеспечения вращения колеса, имитирующего рельс, и испытываемого колеса, и устройство генерирования крутящего момента, выполненное с возможностью генерирования крутящего момента, подлежащего приложению к испытываемому колесу, при этом устройство генерирования крутящего момента включает в себя вращающуюся раму, приводимую во вращение посредством первого электродвигателя, и второй электродвигатель, установленный на вращающейся раме, и по меньшей мере одно из колеса, имитирующего рельс, и испытываемого колеса соединено с первым электродвигателем посредством устройства генерирования крутящего момента.
[0006] Вышеописанная установка для испытаний колес может включать в себя средства распределения мощности, выполненные с возможностью распределения мощности, генерированной первым электродвигателем, между колесом, имитирующим рельс, и испытываемым колесом.
[0007] В вышеописанной установке для испытаний колес колесо, имитирующее рельс, и испытываемое колесо могут быть выполнены с возможностью вращения в противоположных направлениях с по существу одинаковыми окружными скоростями, когда работа второго электродвигателя прекращена.
[0008] В вышеописанной установке для испытаний колес устройство генерирования крутящего момента может включать в себя выходной вал, расположенный коаксиально по отношению к вращающейся раме.
[0009] В вышеописанной установке для испытаний колес устройство генерирования крутящего момента может включать в себя опорный компонент, выполненный с возможностью обеспечения опоры для вращающейся рамы с возможностью ее вращения, при этом вращающаяся рама может иметь цилиндрическую часть в виде вала, опирающуюся на опорный компонент, подшипник может быть предусмотрен на внутренней периферии части в виде вала, и выходной вал может проходить через полую часть части в виде вала и может опираться на подшипник с возможностью вращения.
[0010] В вышеописанной установке для испытаний колес первый электродвигатель может быть расположен коаксиально по отношению к вращающейся раме.
[0011] В вышеописанной установке для испытаний колес второй электродвигатель может быть прикреплен к вращающейся раме посредством множества стержнеобразных соединительных элементов, расположенных радиально вокруг оси вращения вращающейся рамы.
[0012] В вышеописанной установке для испытаний колес вращающая рама может включать в себя цилиндрическую часть для размещения электродвигателя, выполненную с возможностью размещения в ней второго электродвигателя.
[0013] Вышеописанная установка для испытаний колес может включать в себя управляющий компонент, выполненный с возможностью управления первым электродвигателем и вторым электродвигателем, средство измерения частоты вращения, выполненное с возможностью измерения частоты вращения колеса, имитирующего рельс, и средство измерения крутящего момента, выполненное с возможностью измерения крутящего момента на испытываемом колесе, и управляющий компонент может управлять приведением в действие первого электродвигателя на основе результата измерения, полученного средством измерения частоты вращения, и может управлять приведением в действие второго электродвигателя на основе результата измерения, полученного средством измерения крутящего момента.
[0014] Вышеописанная установка для испытаний колес может включать в себя устройство для приложения нагрузки к колесу, выполненное с возможностью приложения нагрузки к испытываемому колесу посредством перемещения одного из испытываемого колеса и колеса, имитирующего рельс, вперед и назад друг относительно друга.
[0015] Вышеописанная установка для испытаний колес может включать в себя устройство для придания угла воздействия, выполненное с возможностью придания угла воздействия посредством поворота одного из испытываемого колеса и колеса, имитирующего рельс, вокруг прямой линии, перпендикулярной к поверхности качения испытываемого колеса, относительно другого колеса.
[0016] Вышеописанная установка для испытаний колес может включать в себя устройство для придания угла возвышения, выполненное с возможностью придания угла возвышения посредством поворота одного из испытываемого колеса и колеса, имитирующего рельс, вокруг касательной линии относительно другого колеса.
[0017] Вышеописанная установка для испытаний колес может включать в себя устройство для приложения бокового давления, выполненное с возможностью приложения бокового давления к испытываемому колесу посредством перемещения одного из испытываемого колеса и колеса, имитирующего рельс, в аксиальном направлении относительно другого колеса.
[0018] В соответствии с вариантом осуществления настоящего изобретения можно уменьшить потребление энергии установкой для испытаний колес.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0019]
[Фиг. 1] Фиг. 1 представляет собой вид в перспективе установки для испытаний колес согласно первому варианту осуществления настоящего изобретения.
[Фиг. 2] Фиг. 2 представляет собой вид в перспективе установки для испытаний колес согласно первому варианту осуществления настоящего изобретения.
[Фиг. 3] Фиг. 3 представляет собой вид в плане установки для испытаний колес согласно первому варианту осуществления настоящего изобретения.
[Фиг. 4] Фиг. 4 представляет собой блок-схему, показывающую схематическую конфигурацию системы привода.
[Фиг. 5] Фиг. 5 представляет собой вид в разрезе, показывающий схематическую конфигурацию зубчатого механизма.
[Фиг. 6] Фиг. 6 представляет собой вид в разрезе, показывающий схематическую конфигурацию устройства генерирования крутящего момента и его периферии.
[Фиг. 7] Фиг. 7 представляет собой вид в разрезе, показывающий схематическую конфигурацию второго электродвигателя.
[Фиг. 8] Фиг. 8 представляет собой блок-схему, показывающую схематическую конфигурацию системы управления.
[Фиг. 9] Фиг. 9 представляет собой вид в плане, показывающий схематическую конфигурацию установки для испытаний колес согласно второму варианту осуществления настоящего изобретения.
[Фиг. 10] Фиг. 10 представляет собой вид спереди, показывающий схематическую конфигурацию установки для испытаний колес согласно второму варианту осуществления настоящего изобретения.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0020] В дальнейшем варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В нижеприведенном описании одни и те же или соответствующие элементы обозначены одинаковыми или соответствующими ссылочными позициями, и дублирующее описание опущено. На каждом чертеже в случае, когда показано множество элементов, имеющих одну и ту же ссылочную позицию, ссылочная позиция необязательно указана для всего множества элементов, и присвоение ссылочной позиции некоторым из множества элементов соответствующим образом исключено.
[0021] (Первый вариант осуществления)
Фиг. 1 и 2 представляют собой виды в перспективе установки 1 для испытаний колес согласно первому варианту осуществления настоящего изобретения. Фиг. 1 представляет собой вид с передней стороны, и Фиг. 2 представляет собой вид с задней стороны. Фиг. 3 представляет собой вид в плане установки 1 для испытаний колес.
[0022] Как показано на Фиг. 1 посредством осей координат, направление от нижнего правого угла к верхнему левому углу задано как направление оси Х, направление от верхнего правого угла к нижнему левому углу задано как направление оси Y, и направление снизу вверх задано как направление оси Z. Направление оси Х и направление оси Y представляют собой горизонтальные направления, ортогональные друг к другу, и направление оси Z представляет собой вертикальное направление. Произвольные прямые линии, проходящие соответственно в направлении оси Х, направлении оси Y и направлении оси Z, упоминаются соответственно как ось Х, ось Y и ось Z. Положительное направление оси Х упоминается как направление влево, отрицательное направление оси Х упоминается как направление вправо, положительное направление оси Y упоминается как направление вперед, отрицательное направление оси Y упоминается как направление назад, положительное направление оси Z упоминается как направление вверх, и отрицательное направление оси Z упоминается как направление вниз.
[0023] Установка 1 для испытаний колес представляет собой установку, выполненную с возможностью имитационного моделирования взаимодействия между рельсом и колесом, происходящего при движении железнодорожного транспортного средства, и с возможностью, например, оценки способности к сцеплению между рельсом и колесом и тому подобных характеристик. В представленном варианте осуществления используется колесо R, которое имитирует рельс и наружная периферия которого имеет форму поперечного сечения, имитирующую головку рельса, и как колесо R, имитирующее рельс, так и колесо для испытаний (в дальнейшем упоминаемое как «испытываемое колесо W») приводятся во вращение в состоянии, в котором испытываемое колесо W поджато к колесу R, имитирующему рельс, посредством чего имитируется взаимодействие между рельсом и колесом при движении железнодорожного транспортного средства.
[0024] Установка 1 для испытаний колес включает в себя систему DS привода, которая обеспечивает приведение в движение колеса R, имитирующего рельс, и испытываемого колеса W. Фиг. 4 представляет собой блок-схему, показывающую схематическую конфигурацию системы DS привода. Система DS привода включает в себя приводную секцию AS, которая генерирует механическую мощность (в дальнейшем упоминаемую просто как «мощность»), и передающую секцию TS, которая передает мощность, генерированную приводной секцией AS, колесу R, имитирующему рельс, и испытываемому колесу W, которые представляют собой объекты, подлежащие приведению в движение, и образует систему циркуляции мощности вместе с колесом R, имитирующим рельс, и испытываемым колесом W, как будет описано позднее.
[0025] Приводная секция AS включает в себя приводное устройство 10 для обеспечения вращательного движения (приводное устройство для регулирования скорости), выполненное с возможностью регулирования частоты вращения объекта, приводимого в движение, и устройство 20 генерирования крутящего момента (приводное устройство для регулирования крутящего момента), выполненное с возможностью регулирования крутящего момента, подлежащего приложению к объекту, приводимому в движение. В системе DS привода по данному варианту осуществления за счет выбора конфигурации, в которой регулирование привода разделено на регулирование скорости и регулирование крутящего момента и специально предусмотренные приводные устройства выполняют соответственно регулирование скорости и регулирование крутящего момента, обеспечивается возможность приведения в движение с высокой скоростью (или с высоким ускорением) и большим крутящим моментом при использовании электродвигателя, имеющего относительно малую мощность. Кроме того, в системе DS привода используется система циркуляции мощности, посредством чего обеспечивается более высокая эффективность использования энергии по сравнению с известными установками.
[0026] Передающая секция TS включает в себя первую передаточную секцию 30 и вторую передаточную секцию 40. Устройство 20 генерирования крутящего момента также образует часть передающей секции TS. Первая передаточная секция 30 обеспечивает передачу вращения на выходе от приводного устройства 10, предназначенного для обеспечения вращательного движения, колесу R, имитирующему рельс, и устройству 20 генерирования крутящего момента. Устройство 20 генерирования крутящего момента обеспечивает добавление мощности, генерированной самим устройством 20 генерирования крутящего момента, к мощности, передаваемой от приводного устройства 10, предназначенного для обеспечения вращательного движения, и выдачу суммированной мощности. Вторая передаточная секция 40 обеспечивает передачу мощности на выходе устройства 20 генерирования крутящего момента испытываемому колесу W.
[0027] Колесо R, имитирующее рельс, и испытываемое колесо W прикрепляют к установке 1 для испытаний колес так, чтобы они были расположены в радиальном направлении и чтобы их оси вращения были параллельны друг другу. При выполнении испытания испытываемое колесо W поджимается к колесу R, имитирующему рельс, и испытываемое колесо W и колесо R, имитирующее рельс, приводятся во вращение в направлениях, противоположных друг другу, с по существу одинаковыми окружными скоростями (то есть линейными скоростями наружных периферийных поверхностей) в состоянии, в котором наружная периферийная поверхность (поверхность качения) испытываемого колеса W находится в контакте с наружной периферийной поверхностью (верхней поверхностью) колеса R, имитирующего рельс. При этом передающая секция TS вместе с испытываемым колесом W и колесом R, имитирующим рельс, образует систему циркуляции мощности (то есть «контур» из трансмиссионных валов). Устройство 20 генерирования крутящего момента обеспечивает приложение крутящего момента к системе циркуляции мощности посредством создания сдвига фаз между входным валом (первой передаточной секцией 30) и выходным валом (второй передаточной секцией 40). При выборе системы циркуляции мощности установка 1 для испытаний колес может обеспечить приложение крутящего момента (или тангенциальной силы) к испытываемому колесу W без существенного поглощения генерированной мощности, и поэтому установка 1 для испытаний колес может функционировать при относительно малом энергопотреблении.
[0028] Первая передаточная секция 30 по данному варианту осуществления выполнена с такой конфигурацией, что колесо R, имитирующее рельс, и испытываемое колесо W приводятся во вращение с одинаковыми окружными скоростями в направлениях, противоположных друг другу, в состоянии, в котором работа устройства 20 генерирования крутящего момента (в частности, второго электродвигателя 22, описанного позднее) прекращена. Следует отметить, что может быть выбрана конфигурация, при которой возникает разница в окружной скорости между колесом R, имитирующим рельс, и испытываемым колесом W в состоянии, в котором работа устройства 20 генерирования крутящего момента прекращена. Однако, поскольку в этом случае количество работы устройства 20 генерирования крутящего момента увеличивается для компенсации разницы в окружной скорости, энергопотребление возрастает. Кроме того, несмотря на то, что первая передаточная секция 30 по данному варианту осуществления выполнена с такой конфигурацией, что колесо R, имитирующее рельс, и устройство 20 генерирования крутящего момента приводятся во вращение с одинаковыми частотами вращения, может быть выбрана конфигурация, при которой колесо R, имитирующее рельс, и устройство 20 генерирования крутящего момента будут приводиться во вращение с разными частотами вращения при условии, что колесо R, имитирующее рельс, и испытываемое колесо W приводятся во вращение с по существу одинаковыми окружными скоростями.
[0029] Как показано на Фиг. 1-3, приводное устройство 10 для обеспечения вращательного движения включает в себя стол 11 для регулировки натяжения и первый электродвигатель 12 (двигатель для регулирования скорости), установленный на столе 11 для регулировки натяжения. Первый электродвигатель 12 по данному варианту осуществления представляет собой так называемый инверторный двигатель, приведение которого в действие регулируется посредством инвертора, но в качестве первого электродвигателя 12 можно использовать электродвигатель другого типа, такой как серводвигатель или шаговый двигатель, в котором частоту вращения можно регулировать. Приводное устройство 10 для обеспечения вращательного движения может включать в себя редуктор для уменьшения частоты вращения на выходе первого электродвигателя 12. Стол 11 для регулирования натяжения будет описан позднее.
[0030] Первая передаточная секция 30 включает в себя первый ременный механизм 31, опорное устройство 32 для колеса, имитирующего рельс, вал 33 и зубчатый механизм 34 (устройство с зубчатыми колесами).
[0031] Как показано на Фиг. 1, первый ременный механизм 31 включает в себя ведущий шкив 311, приводимый в движение посредством приводного устройства 10 для обеспечения вращательного движения, ведомый шкив 312, прикрепленный к входному валу (одному из валов 321, описанных позднее) опорного устройства 32 для колеса, имитирующего рельс, и ремень 313, намотанный вокруг ведущего шкива 311 и ведомого шкива 312.
[0032] Вращение на выходе приводного устройства 10 для обеспечения вращательного движения передается к опорному устройству 32 для колеса, имитирующего рельс, посредством первого ременного механизма 31 первой передаточной секции 30.
[0033] Ремень 313 по данному варианту осуществления представляет собой поликлиновый ремень, имеющий множество V-образных ручьев, расположенных в направлении ширины, но может представлять собой ремень другого типа, такой как клиновидный ремень, имеющий трапециевидную форму поперечного сечения, зубчатый ремень, плоский ремень или ремень круглого сечения.
[0034] Первый ременный механизм 31 по данному варианту осуществления включает в себя одно ременное передаточное устройство, включающее в себя ведущий шкив 311, ведомый шкив 312 и ремень 313, но может включать в себя два или более ременных передаточных устройств, соединенных параллельно или последовательно.
[0035] Передача от приводного устройства 10 для обеспечения вращательного движения к опорному устройству 32 для колеса, имитирующего рельс, не ограничена ременной передачей, и могут быть использованы другие типы передаточного механизма с намотанным элементом, такие как цепной передаточный механизм или проволочный передаточный механизм, или другие передаточные системы, такие как зубчатая передача. Приводное устройство 10 для обеспечения вращательного движения и опорное устройство 32 для колеса, имитирующего рельс, могут быть расположены коаксиально (то есть так, что оси вращения или центральные оси будут совпадать друг с другом), и выходной вал приводного устройства 10 для обеспечения вращательного движения и входной вал опорного устройства 32 для колеса, имитирующего рельс, могут быть соединены непосредственно друг с другом.
[0036] Далее будет описан стол 11 для регулировки натяжения, предусмотренный в приводном устройстве 10 для обеспечения вращательного движения. Как показано на Фиг. 2, стол 11 для регулировки натяжения включает в себя неподвижную раму 111, прикрепленную к основанию В, и подвижную раму 112, к которой прикреплено приводное устройство 10 для обеспечения вращательного движения. Подвижная рама 112 присоединена к неподвижной раме 111 с возможностью поворота посредством стержня 114R, проходящего в направлении оси Y, в правой концевой части подвижной рамы 112, так что можно регулировать угол наклона вокруг оси Y. Расстояние между ведущим шкивом 311 (Фиг. 1) и ведомым шкивом 312 может быть изменено посредством изменения угла наклона подвижной рамы 112, в результате чего можно регулировать натяжение ремня 313, намотанного вокруг ведущего шкива 311 и ведомого шкива 312.
[0037] Как показано на Фиг. 2 и 3, приводное устройство 10 для обеспечения вращательного движения включает в себя два подшипника 322 и два вала 321. Два подшипника 322 расположены по обе стороны колеса R, имитирующего рельс, спереди и сзади от колеса R, имитирующего рельс (то есть по отношению к направлению оси Y), при этом их оси вращения ориентированы в направлении оси Y и расположены коаксиально.
[0038] Один вал 321 опирается на передний подшипник 322 с возможностью вращения, и другой вал 321 опирается на задний подшипник 322 с возможностью вращения. Валы 321 представляют собой фланцевые валы, каждый из которых выполнен с фланцем для установки колеса R, имитирующего рельс, на одном конце вала, и установлены с возможностью отделения и коаксиально на соответствующих боковых поверхностях колеса R, имитирующего рельс, с помощью болтов.
[0039] Ведомый шкив 312 первого ременного механизма 31 прикреплен к другому концу переднего вала 321. Один конец вала 33 соединен с другим концом заднего вала 321. Другой конец вала 33 соединен с входным валом 342а зубчатого механизма 34.
[0040] Часть мощности, передаваемой первым ременным механизмом 31 опорному устройству 32 для колеса, имитирующего рельс, передается колесу R, имитирующему рельс, и остальная часть передается валу 33 (и испытываемому колесу W посредством вала 33, устройства 20 генерирования крутящего момента и второй передаточной секции 40). То есть опорное устройство 32 для колеса, имитирующего рельс, (в частности, валы 321) функционирует (-ют) в качестве средств распределения мощности, предназначенных для распределения мощности, генерируемой первым электродвигателем 12 и передаваемой первым ременным механизмом 31, между колесом R, имитирующим рельс, и валом 33 (и в конце - испытываемым колесом W).
[0041] Конструкция соединения между валами 321 и колесом R, имитирующим рельс, не ограничена соединением посредством фланца и может представлять собой другую конструкцию соединения, например, такую как конструкция, в которой вал 321 вставлен в сквозное отверстие, выполненное в центре колеса R, имитирующего рельс.
[0042] Как показано на Фиг. 3, опорное устройство 32 для колеса, имитирующего рельс, включает в себя кодовый датчик 323 угла поворота (средство определения частоты вращения), предназначенный для определения частоты вращения колеса R, имитирующего рельс.
[0043] Фиг. 5 представляет собой схематический вид в разрезе зубчатого механизма 34 и его периферии, выполненном вдоль горизонтальной плоскости. Зубчатый механизм 34 включает в себя корпус 341, два первых подшипника 343 и два вторых подшипника 345, прикрепленных к корпусу 341, первую шестерню 342 (входную шестерню), опирающуюся на два первых подшипника 343 с возможностью вращения, и вторую шестерню 344 (выходную шестерню), опирающуюся на два вторых подшипника 345 с возможностью вращения.
[0044] Первая шестерня 342 и вторая шестерня 344 расположены рядом друг с другом в направлении оси Х, при этом их оси вращения ориентированы в направлении Y так, что их зубья входят в зацепление друг с другом, и шестерни 342, 344 размещены в корпусе 341. Один конец первой шестерни 342 представляет собой входной вал 342а зубчатого механизма 34 и соединен с другим концом вала 33. Фланец, образованный на одном конце второй шестерни 344, представляет собой выходной вал 344а зубчатого механизма 34 и соединен с фланцем (входным валом 211b), образованным на одном конце описанного позднее корпуса 21 устройства 20 генерирования крутящего момента.
[0045] Вторая шестерня 344 образована с цилиндрическим сквозным отверстием 344b с центром на оси вращения. Выходной вал 24 устройства 20 генерирования крутящего момента, который будет описан позднее, вставлен в сквозное отверстие 344b со стороны одного конца второй шестерни 344 (со стороны левого конца на Фиг. 5, то есть переднего конца выходного вала 344а), проходит через вторую шестерню 344, и передний конец данного вала выступает от другого конца второй шестерни 344.
[0046] В данном варианте осуществления первая шестерня 342 и вторая шестерня 344 имеют одинаковое число зубьев, и поэтому передаточное отношение зубчатого механизма 34 составляет 1. Передаточное отношение зубчатого механизма 34 может быть задано равным величине, отличной от 1, при условии, что испытываемое колесо W и колесо R, имитирующее рельс, могут быть приведены во вращение в противоположных направлениях с по существу одинаковыми окружными скоростями.
[0047] Передача от вала 33 устройству 20 генерирования крутящего момента не ограничена зубчатой передачей, и могут быть использованы другие системы передачи, например, такие как передаточный механизм с намотанным элементом, такой как ременная передача или цепная передача.
[0048] Фиг. 6 представляет собой схематический вид в разрезе устройства 20 генерирования крутящего момента, зубчатого механизма 34 и их периферии, выполненном вдоль плоскости, перпендикулярной к направлению оси Х.
[0049] Устройство 20 генерирования крутящего момента включает в себя основную часть 20А (вращающуюся часть), приводимую во вращение посредством приводного устройства 10, предназначенного для обеспечения вращательного движения, и два опорных компонента 25 и 26 для обеспечения опоры для основной части 20А с возможностью ее вращения.
[0050] Основная часть 20А включает в себя по существу цилиндрический корпус 21 (вращающуюся раму), опирающийся на опорные компоненты 25 и 26, второй электродвигатель 22 и редуктор 23, прикрепленные к корпусу 21, и выходной вал 24. Выходной вал 24 расположен коаксиально по отношению к корпусу 21. Вал 221 и ротор 222 второго электродвигателя 22, который будет описан позднее, могут быть расположены коаксиально по отношению к корпусу 21. При размещении второго электродвигателя 22 коаксиально по отношению к корпусу 21 уменьшается дисбаланс основной части 20А, и становится возможным плавное вращение основной части 20А (то есть с меньшими нежелательными отклонениями частоты вращения и крутящего момента). Несмотря на то, что в данном варианте осуществления второй электродвигатель 22 представляет собой серводвигатель переменного тока, в качестве второго электродвигателя 22 можно использовать электродвигатели других типов, выполненные с возможностью регулирования величины приводного усилия (угла поворота), такие как серводвигатель постоянного тока или шаговый двигатель. В данном варианте осуществления в качестве второго электродвигателя 22 используется высокомощный серводвигатель переменного тока с ротором со сверхнизкой инерцией, с моментом инерции вращающегося компонента, составляющим 0,01 кг⋅м2 или менее (более предпочтительно 0,008 кг⋅м2 или менее), и с номинальной мощностью, составляющей от 3 кВт до 60 кВт (более целесообразно от 7 кВт до 37 кВт). В результате можно обеспечить быстрое изменение крутящего момента (например, вибрационного крутящего момента с высокой частотой, превышающей 500 Гц или 1 кГц).
[0051] Корпус 21 имеет по существу цилиндрическую, первую цилиндрическую часть 212 и по существу цилиндрическую, вторую цилиндрическую часть 214 (часть для размещения электродвигателя), соединительную часть 213, которая соединяет первую цилиндрическую часть 212 и вторую цилиндрическую часть 214, первую часть 211 в виде вала, соединенную с первой цилиндрической частью 212, и вторую часть 215 в виде вала, соединенную со второй цилиндрической частью 214. Первая часть 211 в виде вала, первая цилиндрическая часть 212, соединительная часть 213, вторая цилиндрическая часть 214 и вторая часть 215 в виде в вала представляют собой цилиндрические элементы, имеющие полую часть, проходящую насквозь в аксиальном направлении, и соединены коаксиально в данном порядке для образования цилиндрического корпуса 21. Корпус 21 опирается в зоне первой части 211 в виде вала на опорный компонент 25 и в зоне второй части 215 в виде вала на опорный компонент 26. Фланец, образованный на конце первой части 211 в виде вала, представляет собой входной вал 211b (Фиг. 5) устройства 20 генерирования крутящего момента и соединен с выходным валом 344а зубчатого механизма 34.
[0052] Фиг. 7 представляет собой вертикальное сечение, показывающее схематическую конфигурацию второго электродвигателя 22. Второй электродвигатель 22 включает в себя вал 221, ротор 222, образованный из постоянного магнита или тому подобного и соединенный с валом 221 с образованием одного целого с ним, трубчатый статор 223, предусмотренный с катушкой 223а на его внутренней периферии, два фланца 224 и 226, прикрепленных к обоим концам статора 223 для закрывания отверстий, два подшипника 225 и 227, прикрепленных к соответствующим фланцам 224 и 226, и кодовый датчик RE угла поворота, предназначенный для определения углового положения (фазы) вала 221.
[0053] Вал 221 опирается на два подшипника 225 и 227 с возможностью вращения. Один конец вала 221 (правый конец на Фиг. 7) выступает наружу через фланец 224 и подшипник 225 и служит в качестве выходного вала второго электродвигателя 22. Другой конец вала 221 (левый конец на Фиг. 7) соединен с кодовым датчиком RE угла поворота.
[0054] Как показано на Фиг. 6, второй электродвигатель 22 размещен в полой части (полости С1) второй цилиндрической части 214 корпуса 21. Один конец соединительной части 213 корпуса 21 (левый конец на Фиг. 6) образован с внутренней фланцевой частью 213а, выступающей в направлении внутренней периферии. Статор 223 (Фиг. 7) второго электродвигателя 22 прикреплен ко второй цилиндрической части 214 посредством множества стержнеобразных соединительных элементов 217, расположенных радиально вокруг оси вращения устройства 20 генерирования крутящего момента. В качестве соединительных элементов 217, например, используются шпильки с двусторонней резьбой или шпильки с резьбой на всей длине, имеющие наружную резьбу, образованную на обоих концах. Фланец 224 (Фиг. 7) второго электродвигателя 22 опирается на внутреннюю фланцевую часть 213а соединительной части 213.
[0055] Редуктор 23 размещен в полости С2, которая окружена соединительной частью 213 и первой цилиндрической частью 212 корпуса 21. Вал 221 второго электродвигателя 22 соединен с входным валом 231 редуктора 23, и выходной вал 24 устройства 20 генерирования крутящего момента соединен с выходным валом 232 редуктора 23. Выходной вал 24 может быть соединен непосредственно с валом 221 второго электродвигателя 22 без наличия редуктора 23 в устройстве 20 генерирования крутящего момента.
[0056] Корпус 233 редуктора 23 прикреплен к другому концу соединительной части 213. То есть фланец 224 второго электродвигателя 22 (Фиг. 7) и корпус 233 редуктора 23 соединены друг с другом в одно целое посредством одной цилиндрической соединительной части 213. Следовательно, второй электродвигатель 22 и редуктор 23 соединены с образованием одного целого с высокой жесткостью, и затруднено приложение изгибающего момента к валу 221. В результате может быть уменьшено трение, которое вал 221 «воспринимает» от подшипников 225 и 227 (Фиг. 7), и, следовательно, повышается точность регулирования крутящего момента посредством устройства 20 генерирования крутящего момента.
[0057] Выходной вал 24 устройства 20 генерирования крутящего момента проходит через полые части первой части 211 в виде вала, предусмотренной в корпусе 21, и зубчатого механизма 34 (в частности, второй шестерни 344) и выступает сзади от зубчатого механизма 34. Подшипник 211а и подшипник 344с, предназначенные для обеспечения опоры для выходного вала 24 с возможностью его вращения, предусмотрены на внутренних перифериях соответственно первой части 211 в виде вала, предусмотренной в корпусе 21, и второй шестерни 344 зубчатого механизма 34.
[0058] Два ведущих шкива 411 второго ременного механизма 41, который будет описан позднее, прикреплены к дистальной концевой части выходного вала 24, выступающей назад от зубчатого механизма 34. Дистальная концевая часть выходного вала 24 опирается с возможностью вращения на опорный компонент 414 второго ременного механизма 41.
[0059] Компонент 27 с токосъемными контактными кольцами предусмотрен рядом с передней стороной опорного компонента 26 (левой стороной на Фиг. 6). Компонент 27 с токосъемными контактными кольцами включает в себя подвижную часть 27А, которая вращается вместе с основной частью 20А устройства 20 генерирования крутящего момента, и неподвижную часть 27В, которая прикреплена к основанию В.
[0060] Подвижная часть 27А включает в себя опорную трубу 271 для токосъемных контактных колец, присоединенную коаксиально ко второй части 215 в виде вала, предусмотренной в устройстве 20 генерирования крутящего момента, и множество токосъемных контактных колец 272, прикрепленных коаксиально к наружной периферии опорной трубы 271 для токосъемных контактных колец с интервалами в аксиальном направлении.
[0061] Кабель 228 второго электродвигателя 22 устройства 20 генерирования крутящего момента проходит через вторую часть 215 в виде вала, предусмотренную в корпусе 21. Множество электрических проводов, образующих кабель 228, проходят через полую часть опорной трубы 271 для токосъемных контактных колец и соединены с соответствующими токосъемными контактными кольцами 272.
[0062] Неподвижная часть 27В включает в себя опорный компонент 274 для щеток, множество щеток 273, опирающихся на опорный компонент 274 для щеток, и опорный компонент 275, который обеспечивает опору для концевой части опорной трубы 271, предназначенной для токосъемных контактных колец, с возможностью вращения данной трубы. Щетки 273 расположены с интервалами в направлении оси Y так, чтобы они находились в контакте с наружными периферийными поверхностями соответствующих токосъемных контактных колец 272. Щетки 273 снабжены проводами и соединены с сервоусилителем 22а и тому подобными устройствами, которые будут описаны позднее.
[0063] Кодовый датчик 28 угла поворота, предназначенный для определения частоты вращения опорной трубы 271 для токосъемных контактных колец (то есть частоты вращения корпуса 21, представляющего собой входной вал устройства 20 генерирования крутящего момента), прикреплен к опорному компоненту 275.
[0064] Как показано на Фиг. 3, вторая передаточная секция 40 включает в себя второй ременный механизм 41, шарнир 42 скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью, и опорное устройство 50 для колеса.
[0065] Второй ременный механизм 41 включает в себя две ременные передачи, каждая из которых включает в себя ведущий шкив 411, ведомый шкив 412 и ремень 413, опорный компонент 414, вал 415 и два опорных компонента 416.
[0066] Как описано выше, два ведущих шкива 411 прикреплены к дистальной концевой части выходного вала 24 устройства 20 генерирования крутящего момента, при этом данный выходной вал 24 проходит через зубчатый механизм 34. Опорный компонент 414 обеспечивает опору для дистальной концевой части выходного вала 24 с возможностью вращения.
[0067] Между зубчатым механизмом 34 и ведущим шкивом 411 может быть предусмотрен дополнительный опорный компонент 414, так что дистальный конец выходного вала 24 будет опираться на два опорных компонента 414. В данном варианте осуществления ведущий шкив 411 прикреплен непосредственно к выходному валу 24 устройства 20 генерирования крутящего момента, но вал, предназначенный для обеспечения опоры для ведущего шкива 411, может быть предусмотрен отдельно от выходного вала 24, так что вал, соединенный с выходным валом 24, будет опираться на опорный компонент 414.
[0068] Два ведомых шкива 412 прикреплены к валу 415, опирающемуся с возможностью вращения на два опорных компонента 416.
[0069] Каждый ремень 413 намотан вокруг соответствующих ведущего шкива 411 и ведомого шкива 412.
[0070] Ремень 413 по данному варианту осуществления представляет собой зубчатый ремень, имеющий сердечник из стальной проволоки. Ремень 413 может представлять собой ремень, имеющий сердечник, образованный из так называемого суперволокна, такого как углеродное волокно, арамидное волокно или волокно из полиэтилена с ультравысокой молекулярной массой. При использовании легкого и высокопрочного сердечника, такого как углеродный сердечник, образованный из углеродного волокна, становится возможным приведение в движение с большим ускорением (или приложение большой движущей силы/силы торможения к испытываемому колесу W) посредством использования электродвигателя с относительно низкой выходной мощностью, и, следовательно, становится возможным уменьшение размеров установки 1 для испытаний колес. При использовании легкого (то есть малоинерционного) ремня 413, имеющего сердечник, образованный из так называемого суперволокна, можно улучшить эксплуатационные характеристики установки 1 для испытаний колес, когда используется электродвигатель, имеющий ту же выходную мощность. В качестве ремня 413 можно использовать обычный автомобильный или промышленный синхронизирующий ремень. Плоский ремень или клиновидный ремень можно использовать в качестве ремня 413 вместо зубчатого ремня. Те ремни, которые можно использовать в качестве ремня 413, также можно использовать в качестве ремня 313 первого ременного механизма 31.
[0071] Второй ременный механизм 41 по данному варианту осуществления включает в себя две ременные передачи, соединенные параллельно, но может включать в себя одну ременную передачу или три или более ременных передач, соединенных параллельно.
[0072] Передача от устройства 20 генерирования крутящего момента шарниру 42 скользящего типа, предназначенному для передачи вращения с постоянной угловой скоростью, не ограничена ременной передачей, и можно использовать другие типы передаточного механизма с намотанным элементом, такие как цепной передаточный механизм или проволочный передаточный механизм, или другие передаточные системы, такие как зубчатая передача. Устройство 20 генерирования крутящего момента и шарнир 42 скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью, могут быть расположены на по существу прямой линии (или с V-образной конфигурацией), и выходной вал 24 устройства 20 генерирования крутящего момента и входной вал шарнира 42 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, могут быть соединены непосредственно друг с другом.
[0073] Опорное устройство 50 для колеса соединено с устройством 20 генерирования крутящего момента посредством шарнира 42 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью. В частности, одна концевая часть (то есть входной вал) шарнира 42 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, соединена (соединен) с валом 415 второго ременного механизма 41, и другая концевая часть (то есть выходной вал) шарнира 42 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, соединена (соединен) с описанным позднее шпинделем 527 опорного устройства 50 для колеса.
[0074] Шарнир 42 скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью, выполнен с возможностью плавной передачи вращения без изменений вращения независимо от рабочего угла (то есть угла, образованного между входным валом и выходным валом). Шарнир 42 скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью, также имеет переменную длину в аксиальном направлении (то есть расстояние при передаче).
[0075] Как будет описано позднее, шпиндель 527 опирается с возможностью изменения его положения. При соединении шпинделя 527 с валом 415 второго ременного механизма 41 (иди с выходным валом 24 устройства 20 генерирования крутящего момента) посредством шарнира 42 скользящего типа, предназначенного для передачи вращения с постоянной угловой скорость, в случае, если положение шпинделя 527 изменяется, шарнир 42 скользящего типа, предназначенный для передачи вращения с постоянной угловой скоростью, гибко адаптируется к данному изменению, так что предотвращается воздействие большого напряжения на шпиндель 527 и вал 415 (или на выходной вал 24 устройства 20 генерирования крутящего момента), и вращение может плавно передаваться шпинделю 527. При использовании шарнира 42 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, предотвращается изменение частоты вращения, сообщенной шпинделю 527, в зависимости от положения шпинделя 527 (или рабочего угла шарнира 42 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью).
[0076] Как показано на Фиг. 1, опорное устройство 50 для колеса включает в себя неподвижное основание 51 и основную часть 52 и устройство 53 для приложения нагрузки к колесу, расположенные на неподвижном основании 51.
[0077] Как показано на Фиг. 3, основная часть 52 включает в себя подвижное основание 522, две прямолинейные направляющие 521, которые обеспечивают опору для подвижного основания 522 с возможностью его перемещения в направлении оси Х относительно неподвижного основания 51, опорную раму 523, установленную на подвижном основании 522, опорный компонент 528, прикрепленный к опорной раме 523, шпиндель 527, опирающийся с возможностью вращения на опорный компонент 528, датчик 524 крутящего момента и средство 525 для обнаружения, прикрепленные коаксиально к шпинделю 527, и датчик 526 частоты вращения, предназначенный для обнаружения вращения средства 525 для обнаружения. Прямолинейная направляющая 521 представляет собой опору типа направляющей с циркуляцией тел качения, предусмотренную с прямолинейной рельсовой направляющей (направляющей) и кареткой, выполненной с возможностью перемещения по рельсовой направляющей посредством тел качения. Тем не менее в качестве прямолинейной направляющей 521 можно использовать линейные направляющие механизмы других типов. Прямолинейная направляющая 521 образует часть устройства 53 для приложения нагрузки к колесу. Средство 525 для обнаружения и датчик 526 частоты вращения образуют средство определения частоты вращения, предназначенное для определения частоты вращения шпинделя 527.
[0078] Опорная рама 523 имеет опорную стойку 523а, прикрепленную к подвижному основанию 522, и консольный элемент 523b, прикрепленный к опорной стойке 523а. Несмотря на то, что опорная стойка 523а по данному варианту осуществления представляет собой L-образный кронштейн, можно использовать опорную стойку 523а других типов. Опорная стойка 523а и консольный элемент 523b могут быть образованы как одно целое. Консольный элемент 523b представляет собой по существу L-образный конструктивный элемент, если смотреть сверху, который имеет базовую часть 523b1, проходящую назад от верхней части опорной стойки 523а, и соединительную часть 523b2, проходящую влево от задней концевой части базовой части 523b1. В дистальной концевой части соединительной части 523b2 образована полая часть, проходящая в направлении оси Y. Приводной вал (в частности, комплект, состоящий из шарнира 42 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, датчика 524 крутящего момента, средства 525 для обнаружения и шпинделя 527, соединенных друг с другом) проходит через данную полую часть.
[0079] Опорный компонент 528 прикреплен к консольному элементу 523b. Более конкретно, опорный компонент 528 прикреплен к передней поверхности передней концевой части соединительной части 523b2 так, что его ось вращения ориентирована в направлении оси Y. Опорный компонент 528 предусмотрен с множеством датчиков, представляющих собой датчики 529 трех составляющих силы (средство определения тангенциальной силы и первое средство определения бокового давления), предназначенные для определения силы, воспринимаемой от шпинделя 527. Датчики 529 трех составляющих силы представляют собой пьезоэлектрические датчики силы, но другие типы датчиков силы можно использовать в качестве датчиков 529 трех составляющих силы.
[0080] Шпиндель 527 соединен с выходным валом шарнира 42 скользящего типа, предназначенного для передачи вращения с постоянной угловой скоростью, посредством средства 525 для обнаружения и датчика 524 крутящего момента. Средство 525 для обнаружения и датчик 524 крутящего момента размещены в полой части, образованной в дистальной концевой части соединительной части 523b2. Испытываемое колесо W прикреплено к установочной части, предусмотренной в зоне дистальной концевой части шпинделя 527. Датчик 524 крутящего момента определяет крутящий момент, действующий на шпиндель 527 (то есть действующий на испытываемое колесо W).
[0081] Датчик 526 частоты вращения расположен напротив наружной периферийной поверхности средства 525 для обнаружения и прикреплен к соединительной части 523b2 опорной рамы 523. Датчик 526 частоты вращения представляет собой, например, датчик бесконтактного типа, например, оптического типа, электромагнитного типа или магнитоэлектрического типа, и определяет изменение углового положения средства 525 для обнаружения.
[0082] Устройство 53 для приложения нагрузки к колесу представляет собой механизм, который обеспечивает приложение нагрузки заданной величины к испытываемому колесу W посредством перемещения основной части 52 опорного устройства 50 для колеса в направлении оси Х и поджима испытываемого колеса W, прикрепленного к шпинделю 527, к колесу R, имитирующему рельс.
[0083] Устройство 53 для приложения нагрузки к колесу включает в себя электродвигатель 531, преобразователь 532 движения, который преобразует вращательное движение электродвигателя 531 в прямолинейное перемещение в направлении оси Х, и датчик 533 нагрузки на колесо (Фиг. 10), предназначенный для определения нагрузки на колесо, действующей на испытываемое колесо W.
[0084] Несмотря на то, что электродвигатель 531 представляет собой серводвигатель переменного тока, в качестве электродвигателя 531 можно использовать электродвигатели других типов, выполненные с возможностью регулирования величины приводного усилия (угла поворота), такие как серводвигатель постоянного тока или шаговый двигатель.
[0085] Преобразователь 532 движения по данному варианту осуществления представляет собой, например, винтовой механизм, в котором редуктор, такой как устройство с червячным колесом, соединен с винтовым механизмом подачи, таким как шариковый винт, но можно использовать другие типы преобразователя движения. Прямолинейно перемещающаяся часть 532а преобразователя 532 движения прикреплена к опорной раме 523 посредством датчика 533 нагрузки на колесо.
[0086] Когда электродвигатель 531 обеспечивает приведение в действие преобразователя 532 движения, опорная рама 523 и шпиндель 527, опирающийся на опорную раму 523, перемещаются в направлении оси Х вместе с прямолинейно перемещающейся частью 532а. В результате испытываемое колесо W, прикрепленное к шпинделю 527, перемещается взад и вперед относительно колеса R, имитирующего рельс. Когда электродвигатель 531 обеспечивает приведение в действие преобразователя 532 движения для перемещения дальше в направлении, в котором испытываемое колесо W перемещается к колесу R, имитирующему рельс (то есть в положительном направлении оси Х), в состоянии, в котором испытываемое колесо W и колесо R, имитирующее рельс, находятся в контакте друг с другом, испытываемое колесо W поджимается к колесу R, имитирующему рельс, и нагрузка на колесо будет приложена к испытываемому колесу W.
[0087] Датчик 533 нагрузки на колесо представляет собой датчик силы, который определяет силу (то есть нагрузку на колесо), действующую в направлении оси Х на испытываемое колесо W посредством опорной рамы 523 и шпинделя 527 и создаваемую устройством 53 для приложения нагрузки к колесу. Датчик 533 нагрузки на колесо по данному варианту осуществления представляет собой датчик силы типа тензометрического датчика, но в качестве датчика 533 нагрузки на колесо можно использовать датчики силы других типов, такие как пьезоэлектрический датчик силы. Управляющий компонент 70, который будет описан позднее, управляет приведением в действие электродвигателя 531 так, чтобы нагрузка на колесо, имеющая заданную величину, была приложена к испытываемому колесу W на основе результата измерения, полученного датчиком 533 нагрузки на колесо.
[0088] Фиг. 8 представляет собой блок-схему, показывающую схематическую конфигурацию системы CS управления, предусмотренной в установке 1 для испытаний колес. Система CS управления включает в себя управляющий компонент 70, который управляет работой всей установки 1 для испытаний колес, измерительный компонент 80, который выполняет различные измерения на основе сигналов от различных датчиков, предусмотренных для установки 1 для испытаний колес, и интерфейсный компонент 90 для выполнения ввода данных извне и вывода данных вовне.
[0089] Второй электродвигатель 22 и электродвигатель 531 соединены с управляющим компонентом 70 посредством соответствующих сервоусилителей 22а и 531а, и первый электродвигатель 12 соединен с управляющим компонентом 70 посредством схемы 12а запуска (инверторной схемы).
[0090] Кодовые датчики 28 и 323 угла поворота, датчик 524 крутящего момента, датчики 529 трех составляющих силы и датчик 533 нагрузки на колесо соединены с измерительным компонентом 80 посредством соответствующих усилителей 28a, 323a, 524a, 529a и 533a. На Фиг. 8 показан только один типовой комплект из множества комплектов, состоящих из датчиков 529 трех составляющих силы и усилителей 529а, предусмотренных для установки 1 для испытаний колес. Датчик 526 частоты вращения, интегрированный со схемой усилителя и схемой аналого-цифрового преобразователя, соединен непосредственно с измерительным компонентом 80.
[0091] Измерительный компонент 80 обеспечивает измерение частоты вращения колеса R, имитирующего рельс, на основе сигнала от кодового датчика 323 угла поворота, измерение частоты вращения входного вала (корпуса 21) устройства 20 генерирования крутящего момента на основе сигнала от кодового датчика 28 угла поворота, измерение частоты вращения шпинделя 527 (то есть частоты вращения испытываемого колеса W) на основе сигнала от датчика 526 частоты вращения. Кроме того, измерительный компонент 80 обеспечивает измерение крутящего момента, действующего на испытываемое колесо W, на основе сигнала от датчика 524 крутящего момента, измерение тангенциальной силы (силы продольного крипа) и бокового давления (осевой нагрузки), действующих на испытываемое колесо W, на основе сигналов от множества датчиков 529 трех составляющих силы, и измерение нагрузки на колесо на основе сигнала от датчика 533 нагрузки на колесо. То есть измерительный компонент 80 функционирует в качестве первого средства измерения частоты вращения, предназначенного для измерения частоты вращения колеса R, имитирующего рельс, второго средства измерения частоты вращения, предназначенного для измерения частоты вращения устройства 20 генерирования крутящего момента, третьего средства измерения частоты вращения, предназначенного для измерения частоты вращения испытываемого колеса W, средства измерения крутящего момента, предназначенного для измерения крутящего момента, действующего на испытываемое колесо W, средства измерения тангенциальной силы, предназначенного для измерения тангенциальной силы, действующей на испытываемое колесо W, средства измерения бокового давления, предназначенного для измерения бокового давления, действующего на испытываемое колесо W, и средства измерения нагрузки на колесо, предназначенного для измерения нагрузки на колесо, действующей на испытываемое колесо W. Измерительный компонент 80 передает данные измеренные значения управляющему компоненту 70.
[0092] Несмотря на то, что установка 1 для испытаний колес по данному варианту осуществления включает в себя много средств измерения и соответствующих средств обнаружения, поскольку она представляет собой относительно универсальную установку, установка 1 для испытаний колес необязательно должна быть предусмотрена со всеми данными средствами измерения и средствами обнаружения и может быть предусмотрена с одним или более комплектами, состоящими из средств измерения и средств обнаружения, которые выбраны соответствующим образом в соответствии с объектами, подлежащими исследованию/изучению посредством испытания.
[0093] Данные о фазе вала, полученные кодовым датчиком RE угла поворота, встроенным в каждый серводвигатель (второй электродвигатель 22 и электродвигатель 531), вводятся в управляющий компонент 70 посредством соответствующих сервоусилителей 22а, 531а.
[0094] Интерфейсный компонент 90 включает в себя, например, один или более из пользовательского интерфейса, предназначенного для ввода данных пользователем и выдачи данных пользователю, сетевого интерфейса, предназначенного для соединения с различными сетями, такими как локальная сеть (LAN), и различных коммуникационных интерфейсов, таких как универсальная последовательная шина (USB) и универсальная интерфейсная шина (GPIB), предназначенных для соединения с внешними устройствами. Пользовательский интерфейс включает в себя, например, один/одно или более из различных переключателей режимов работы, различных устройств отображения, таких как индикаторы и жидкокристаллический дисплей (LCD), различных указывающих устройств, таких как мышь и сенсорная панель, и различных устройств ввода/вывода, таких как сенсорный экран, видеокамера, принтер, сканер, устройство звуковой сигнализации, динамик, микрофон и устройство для считывания с карты памяти/записи на карту памяти.
[0095] Управляющий компонент 70 управляет приведением в действие первого электродвигателя 12 на основе вводимых данных по частоте вращения (или окружной скорости) колеса R, имитирующего рельс, которые вводятся посредством интерфейсного компонента 90, и результата измерения частоты вращения колеса R, имитирующего рельс, посредством измерительного компонента 80, так что колесо R, имитирующее рельс, вращается с заданной частотой вращения.
[0096] Управляющий компонент 70 управляет приведением в действие электродвигателя 531 устройства 53, предназначенного для приложения нагрузки к колесу, на основе вводимых данных по нагрузке на колесо, которые вводятся посредством интерфейсного компонента 90, и результата измерения нагрузки на колесо посредством измерительного компонента 80, так что обеспечивается приложение заданной нагрузки на колесо к испытываемому колесу W.
[0097] Управляющий компонент 70 управляет приведением в действие второго электродвигателя 22 устройства 20 генерирования крутящего момента на основе вводимых данных по крутящему моменту на испытываемом колесе W, которые вводятся посредством интерфейсного компонента 90, и результата измерения крутящего момента на испытываемом колесе W посредством измерительного компонента 80, так что обеспечивается приложение заданного крутящего момента к испытываемому колесу W.
[0098] Далее будет описан пример способа выполнения испытаний посредством использования установки 1 для испытаний колес. Сначала управляющий компонент 70 обеспечивает приведение в действие электродвигателя 531 устройства 53, предназначенного для приложения нагрузки к колесу, в состоянии, в котором колесо R, имитирующее рельс, и испытываемое колесо W присоединены к установке 1 для испытаний колес, для приближения испытываемого колеса W к колесу R, имитирующему рельс, и ввода испытываемого колеса W в контакт с колесом R, имитирующим рельс, и приложение заданной нагрузки на колесо к испытываемому колесу W. В качестве заданной величины нагрузки на колесо может быть задана постоянная величина или переменная величина, которая изменяется во времени.
[0099] После этого управляющий компонент 70 приводит в действие первый электродвигатель 12 приводного устройства 10, предназначенного для обеспечения вращательного движения, так, что колесо R, имитирующее рельс, вращается с заданной частотой вращения. В качестве заданного значения частоты вращения колеса R, имитирующего рельс, может быть задана постоянная величина или переменная величина, которая изменяется во времени. Управляющий компонент 70 также управляет вторым электродвигателем 22 так, что крутящий момент на испытываемом колесе W составляет 0 (отсутствие нагрузки) до тех пор, пока частота вращения колеса R, имитирующего рельс, не достигнет заданного значения.
[0100] Когда частота вращения колеса R, имитирующего рельс, достигнет заданного значения, управляющий компонент 70 осуществляет управление приведением в действие второго электродвигателя 22 устройства 20 генерирования крутящего момента так, чтобы заданный крутящий момент был приложен к испытываемому колесу W. В качестве заданной величины крутящего момента на испытываемом колесе W может быть задана постоянная величина или переменная величина, которая изменяется во времени. Управление приведением в действие второго электродвигателя 22 может осуществляться так, что заданный крутящий момент будет приложен к испытываемому колесу W с момента начала приведения во вращение колеса R, имитирующего рельс.
[0101] В этом состоянии управляющий компонент 70 обеспечивает вращение колеса R, имитирующего рельс, и испытываемого колеса W при непрерывном измерении частоты вращения колеса R, имитирующего рельс, крутящего момента на испытываемом колесе W, тангенциальной силы, бокового давления и нагрузки на колесо в течение заданного времени (времени испытания). При этом управляющий компонент 70 обеспечивает сохранение каждого измеренного значения в запоминающем устройстве 71 управляющего компонента 70 (или, например, в запоминающем средстве, к которому управляющий компонент 70 может иметь доступ, таком как сервер 77, соединенный с управляющим компонентом 70 посредством локальной сети (LAN)) в сочетании с измеренным временем.
[0102] Когда истечет заданное время, управляющий компонент 70 обеспечит управление приведением в действие второго электродвигателя 22 устройства 20 генерирования крутящего момента так, чтобы крутящий момент на испытываемом колесе W стал равным 0. После этого управляющий компонент 70 осуществляет управление первым электродвигателем 12 приводного устройства 10, предназначенного для обеспечения вращательного движения, для постепенного уменьшения частоты вращения колеса R, имитирующего рельс, для прекращения вращения и затем обеспечивает приведение в действие электродвигателя 531 устройства 53 для приложения нагрузки к колесу для перемещения испытываемого колеса W от колеса R, имитирующего рельс, на заданное расстояние для окончания испытания.
[0103] Порядок проведения испытаний, описанный выше, представляет собой только пример методик испытаний, которые могут быть выполнены при использовании установки 1 для испытаний колес, и могут быть реализованы различные другие методики испытаний.
[0104] (Второй вариант осуществления)
Далее будет описан второй вариант осуществления настоящего изобретения. В нижеприведенном описании второго варианта осуществления основное внимание уделено аспектам, отличающимся от первого варианта осуществления, описанного выше, и конфигурации, такие же, как в первом варианте осуществления, или соответствующие конфигурациям в первом варианте осуществления, обозначены такими же или соответствующими ссылочными позициями, и дублирующее описание опущено.
[0105] Фиг. 9 представляет собой вид в плане, показывающий схематическую конфигурацию установки 1000 для испытаний колес согласно второму варианту осуществления настоящего изобретения. Фиг. 10 представляет собой вид спереди, показывающий схематическую конфигурацию установки 1000 для испытаний колес.
[0106] Установка 1000 для испытаний колес включает в себя опорное устройство 1500 для колеса, в котором функция приложения бокового давления, функция придания угла воздействия и функция придания угла возвышения добавлены к функциям опорного устройства 50 для колеса по первому варианту осуществления.
[0107] Как показано на Фиг. 9, опорное устройство 1500 для колеса, предусмотренное в установке 1000 для испытаний колес, включает в себя устройство 54 для приложения бокового давления, устройство 55 для придания угла возвышения и устройство 56 для придания угла воздействия помимо устройства 53 для приложения нагрузки к колесу. Как показано на Фиг. 10, опорное устройство 1500 для колеса также включает в себя три подвижных основания (первое подвижное основание 522А, второе подвижное основание 522В и третье подвижное основание 522С).
[0108] Устройство 54 для приложения бокового давления представляет собой механизм, который обеспечивает приложение бокового давления (осевой нагрузки) к испытываемому колесу W. Боковое давление включает в себя силу поперечного крипа (составляющую силы адгезии, действующую в аксиальном направлении испытываемого колеса W) и силу реакции реборды (силу, вызываемую контактом между ребордой испытываемого колеса W и рабочей гранью колеса R, имитирующего рельс), и сила реакции реборды, упомянутая последней, будет приложена (или скорректирована до заданной величины) посредством устройства 54 для приложения бокового давления.
[0109] Устройство 54 для приложения бокового давления включает в себя множество прямолинейных направляющих 541 (например, три прямолинейные направляющие 541), которые обеспечивают опору для первого подвижного основания 522А относительно основания 51 с возможностью перемещения первого подвижного основания 522А в направлении оси Y, электродвигатель 542 (Фиг. 9), прикрепленный к основанию В вместе с неподвижным основанием 51, преобразователь 543 движения (Фиг. 9), который преобразует вращательное движение электродвигателя 542 в прямолинейное перемещение в направлении оси Y, и датчик 544 бокового давления (Фиг. 9), которые определяет боковое давление, действующее на испытываемое колесо W. Прямолинейная направляющая 541 представляет собой опору типа направляющей с циркуляцией тел качения, имеющую такую же конфигурацию, как прямолинейная направляющая 521, но линейные направляющие механизмы других типов могут быть использованы в качестве прямолинейной направляющей 541.
[0110] В данном варианте осуществления датчик 544 бокового давления (второе средство определения бокового давления) используется для определения бокового давления при приложении силы реакции реборды, и датчики 529 трех составляющих силы (первые средства определения бокового давления) используются для определения бокового давления, когда сила реакции реборды не приложена. Установка 1000 для испытаний колес может быть выполнена с возможностью определения бокового давления посредством использования датчиков 529 трех составляющих силы даже при приложении силы реакции реборды, при этом датчик 544 бокового давления не предусмотрен. В альтернативном варианте установка 1000 для испытаний колес также может быть выполнена с возможностью определения бокового давления посредством использования датчика 544 бокового давления, даже когда сила реакции реборды не приложена. В альтернативном варианте установка 1000 для испытаний колес может быть выполнена с возможностью определения статического бокового давления (главным образом силы реакции реборды) посредством использования датчика 544 бокового давления и с возможностью определения динамического бокового давления (главным образом силы поперечного крипа) посредством использования датчиков 529 трех составляющих силы.
[0111] Несмотря на то, что электродвигатель 542 в данном варианте осуществления представляет собой серводвигатель переменного тока, в качестве электродвигателя 542 можно использовать электродвигатели других типов, выполненные с возможностью регулирования величины приводного усилия (угла поворота), такие как серводвигатель постоянного тока или шаговый двигатель.
[0112] Несмотря на то, что преобразователь 543 движения в данном варианте осуществления представляет собой винтовой механизм подачи, такой как шариковый винт, можно использовать другие типы преобразователя движения. Ходовой винт преобразователя 543 движения опирается с возможностью вращения на два подшипника, прикрепленных к неподвижному основанию 51, и один конец ходового винта соединен с валом электродвигателя 542. Гайка (прямолинейно перемещающийся компонент) преобразователя 543 движения прикреплена к первому подвижному основанию 522А посредством датчика 544 бокового давления. Когда ходовой винт преобразователя 543 движения приводится во вращение посредством электродвигателя 542, первое подвижное основание 522А перемещается в направлении оси Y вместе с гайкой преобразователя 543 движения. В результате испытываемое колесо W, опирающееся на первое подвижное основание 522А, также перемещается в направлении оси Y, в результате чего изменяется положение испытываемого колеса W в аксиальном направлении относительно колеса R, имитирующего рельс. Когда испытываемое колесо W смещается в направлении оси Y и реборда испытываемого колеса W вводится в контакт с колесом R, имитирующим рельс, сила реакции реборды будет приложена к испытываемому колесу W. Величина силы реакции реборды изменяется в зависимости от положения испытываемого колеса W в направлении оси Y.
[0113] Как показано на Фиг. 8, электродвигатель 542 соединен с управляющим компонентом 70 посредством сервоусилителя 542а. Датчик 544 бокового давления соединен с измерительным компонентом 80 посредством усилителя 544а. Данные о фазе вала, полученные кодовым датчиком RE угла поворота, встроенным в электродвигатель 542, вводятся в управляющий компонент 70 посредством сервоусилителя 542а.
[0114] Измерительный компонент 80 обеспечивает измерение бокового давления, действующего на испытываемое колесо W, на основе сигнала от датчика 544 бокового давления. Управляющий компонент 70 управляет приведением в действие электродвигателя 542 на основе вводимых данных по боковому давлению, введенных посредством интерфейсного компонента 90, и результата измерения бокового давления посредством измерительного компонента 80, так что обеспечивается приложение заданного бокового давления к испытываемому колесу W.
[0115] Устройство 55 для придания угла возвышения представляет собой механизм, предназначенный для придания угла возвышения испытываемому колесу W. Как показано на Фиг. 10, устройство 55 для придания угла возвышения включает в себя проходящий вертикально вал 551, обеспечивающий опору при повороте и прикрепленный к одному из первого подвижного основания 522А и второго подвижного основания 522В, и подшипник 552, прикрепленный к другому из первого подвижного основания 522А и второго подвижного основания 522В и обеспечивающий опору с возможностью поворота для вала 551, обеспечивающего опору при повороте. Второе подвижное основание 522В опирается на вал 551, обеспечивающий опору при повороте, и подшипник 552 с возможностью поворота второго подвижного основания 522В вокруг оси А1 вращения подшипника 552, которая представляет собой вертикальную линию.
[0116] Подшипник 552 расположен по существу непосредственно под местом Р контакта, в котором испытываемое колесо W контактирует с колесом R, имитирующим рельс (в данном варианте осуществления данное место соответствует правому концу колеса R, имитирующего рельс), так что ось А1 вращения/поворота проходит через место Р контакта. Ось А1 вращения представляет собой касательную линию, проходящую между колесом R, имитирующим рельс, и испытываемым колесом W в месте Р контакта. Следовательно, когда второе подвижное основание 522В поворачивается вокруг оси А1 вращения, испытываемое колесо W поворачивается относительно места Р контакта вокруг оси Z (другими словами, испытываемое колесо W поворачивается вокруг общей касательной линии, проходящей между испытываемым колесом W и колесом R, имитирующим рельс), и изменяется угол наклона (то есть угол возвышения) вокруг касательной линии относительно колеса R, имитирующего рельс.
[0117] Устройство 55 для придания угла возвышения включает в себя криволинейную направляющую 553, которая обеспечивает опору для второго подвижного основания 552В в зоне наружной периферийной части на удалении от оси А1 вращения, так что второе подвижное основание 522В может поворачиваться вокруг оси А1 вращения относительно первого подвижного основания 522А. Криволинейная направляющая 553 представляет собой опору типа направляющей с циркуляцией тел качения, включающую в себя криволинейную рельсовую направляющую (направляющую) и каретку, выполненную с возможностью перемещения по рельсовой направляющей посредством тел качения, но в качестве криволинейной направляющей 553 можно использовать криволинейные направляющие механизмы других типов.
[0118] Кроме того, устройство 55 для придания угла возвышения включает в себя электродвигатель 554 (Фиг. 9) и преобразователь 555 движения, который преобразует вращательное движение электродвигателя 554 в прямолинейное перемещение в направлении оси Y. Несмотря на то, что электродвигатель 554 в данном варианте осуществления представляет собой серводвигатель переменного тока, в качестве электродвигателя 554 можно использовать электродвигатели других типов, выполненные с возможностью регулирования величины приводного усилия (угла поворота), такие как серводвигатель постоянного тока или шаговый двигатель. Несмотря на то, что преобразователь 555 движения в данном варианте осуществления представляет собой винтовой механизм подачи, такой как шариковый винт, можно использовать другие типы преобразователя движения.
[0119] Ходовой винт 555а преобразователя 555 движения опирается с возможностью вращения на два подшипника, и один конец ходового винта 555а соединен с валом электродвигателя 554. На Фиг. 10 подшипники, обеспечивающие опору для ходового винта 555а, не показаны. Электродвигатель 554 и два подшипника преобразователя 555 движения прикреплены к непоказанному поворотному столу, который выполнен с возможностью поворота вокруг вертикального вала, предусмотренного на первом подвижном основании 522А. Электродвигатель 544 расположен так, что его вал пересекается под прямым углом с осью поворота поворотного стола.
[0120] Как показано на Фиг. 10, гайка 555b (прямолинейно перемещающийся компонент) преобразователя 555 движения присоединена ко второму подвижному основанию 522В посредством шарнира 556 с возможностью ее поворота вокруг вертикальной оси. Когда ходовой винт 555а приводится во вращение посредством электродвигателя 554, шарнир 556, прикрепленный ко второму подвижному основанию 522В, перемещается по существу в направлении оси Y вместе с гайкой 555b. Соответственно, второе подвижное основание 522В поворачивается вокруг оси А1 вращения/поворота, и испытываемое колесо W, опирающееся на второе подвижное основание 522В, поворачивается вокруг места Р контакта, в результате чего угол возвышения изменяется.
[0121] Как показано на Фиг. 8, электродвигатель 554 соединен с управляющим компонентом 70 посредством сервоусилителя 554а. Данные о фазе вала, полученные кодовым датчиком RE угла поворота, встроенным в электродвигатель 554, вводятся в управляющий компонент 70 посредством сервоусилителя 554а.
[0122] Управляющий компонент 70 рассчитывает текущее значение угла возвышения на основе сигнала от кодового датчика RE угла поворота, встроенного в электродвигатель 544. Управляющий компонент 70 управляет приведением в действие электродвигателя 554 на основе вводимых данных по углу возвышения, введенных посредством интерфейсного компонента 90, и текущего значения угла возвышения, так что обеспечивается придание заданного угла возвышения испытываемому колесу W.
[0123] Устройство 56 для придания угла воздействия представляет собой механизм, предназначенный для придания угла воздействия испытываемому колесу W. Угол воздействия представляет собой угол, образованный между рельсом и колесом, и, более конкретно, угол относительно вертикальной оси (то есть угол в направлении рысканья), образованный между направлением ширины рельса (направлением железнодорожной шпалы) и аксиальным направлением колеса. В установке 1000 для испытаний колес угол воздействия задан как угол между осью вращения колеса R, имитирующего рельс, и осью поворота испытываемого колеса W вокруг оси Х.
[0124] Как показано на Фиг. 10, опорная рама 1523 опорного устройства 1500 для колеса по данному варианту осуществления включает в себя опорную стойку 1523а прямоугольного сечения, прикрепленную к третьему подвижному основанию 522С, и консольный элемент 1523b, соединенный с опорной стойкой 1523а с возможностью поворота вокруг оси А2 поворота, проходящей в направлении оси Х. Аналогично консольному элементу 523b по первому варианту осуществления, консольный элемент 1523b представляет собой по существу L-образный элемент, если смотреть сверху, и включает в себя базовую часть 1523b1, проходящую в направлении оси Y и соединенную с верхней частью опорной стойки 1523а, и соединительную часть 1523b2, проходящую влево от задней концевой части базовой части 1523b1.
[0125] Вал 561, обеспечивающий опору при повороте, выступает в направлении оси Х от правого конца базовой части 1523b1. Подшипник 562, который обеспечивает опору с возможностью поворота для вала 561, обеспечивающего опору при повороте, прикреплен к верхней части опорной стойки 1523а. Консольный элемент 1523b опирается на подшипник 562 посредством вала 561, обеспечивающего опору при повороте, с возможностью поворота консольного элемента 1523а вокруг оси А2 поворота, проходящей в направлении оси Х. Подшипник 562 расположен так, что ось А2 поворота проходит через место Р контакта. То есть ось А2 поворота представляет собой прямую линию, проходящую перпендикулярно через поверхность качения испытываемого колеса W. Вал 561, обеспечивающий опору при повороте, и подшипник 562 образуют часть устройства 56 для придания угла воздействия.
[0126] Как показано на Фиг. 9, устройство 56 для придания угла воздействия включает в себя электродвигатель 564 и преобразователь 563 движения, который преобразует вращательное движение электродвигателя 564 в прямолинейное перемещение в направлении оси Z. Несмотря на то, что электродвигатель 564 в данном варианте осуществления представляет собой серводвигатель переменного тока, в качестве электродвигателя 564 можно использовать электродвигатели других типов, выполненные с возможностью регулирования величины приводного усилия (угла поворота), такие как серводвигатель постоянного тока или шаговый двигатель. Несмотря на то, что преобразователь 563 движения в данном варианте осуществления представляет собой винтовой механизм подачи, такой как шариковый винт, можно использовать другие типы преобразователя движения.
[0127] Ходовой винт преобразователя 563 движения опирается с возможностью вращения на два подшипника, и один конец ходового винта соединен с валом электродвигателя 564 посредством конической зубчатой передачи. Ходовой винт преобразователя 563 движения может быть соединен непосредственно с валом электродвигателя 564. Электродвигатель 564 и преобразователь 563 движения прикреплены к поворотной раме, присоединенной к третьему подвижному основанию 522С посредством шарнира, имеющего ось поворота, проходящую в направлении оси Х, с возможностью вращения (то есть с возможностью поворота) в пределах заданного углового диапазона вокруг оси поворота шарнира.
[0128] Гайка (прямолинейно перемещающийся компонент) преобразователя 563 движения присоединена к консольному элементу 1523b опорной рамы 1523 посредством шарнира, имеющего ось поворота, проходящую в направлении оси Х, с возможностью поворота вокруг оси поворота шарнира. Когда ходовой винт преобразователя 563 движения приводится во вращение посредством электродвигателя 564, шарнир, прикрепленный к консольному элементу 1523b, перемещается вместе с гайкой по существу в направлении оси Z. Соответственно, испытываемое колесо W, опирающееся на консольный элемент 1523b, поворачивается вместе с консольным элементом 1523b вокруг оси А2 поворота, проходящей через место Р контакта (другими словами, вокруг прямой линии, перпендикулярной к поверхности качения испытываемого колеса), в результате чего придается угол воздействия.
[0129] Как показано на Фиг. 8, электродвигатель 564 соединен с управляющим компонентом 70 посредством сервоусилителя 564а. Данные о фазе вала, полученные кодовым датчиком RE угла поворота, встроенным в электродвигатель 564, вводятся в управляющий компонент 70 посредством сервоусилителя 564а.
[0130] Управляющий компонент 70 рассчитывает текущее значение угла воздействия на основе сигнала от кодового датчика RE угла поворота, встроенного в электродвигатель 564. Управляющий компонент 70 управляет приведением в действие электродвигателя 564 на основе вводимых данных по углу воздействия, введенных посредством интерфейсного компонента 90, и текущего значения угла воздействия, так что обеспечивается придание заданного угла воздействия испытываемому колесу W.
[0131] Как показано на Фиг. 10, прямолинейно перемещающаяся часть 532а преобразователя 532 движения, предусмотренного в устройстве 53 для приложения нагрузки к колесу, прикреплена к опорной стойке 1523а опорной рамы 1523 посредством датчика 533 нагрузки на колесо. Прямолинейно перемещающаяся часть 532а преобразователя 532 движения расположена так, что ее осевая линия совпадает с осью А2 поворота. Это предотвращает приложение большого момента силы к опорной раме 1523 при приложении нагрузки к колесу.
[0132] Вышеизложенное представляет собой описание вариантов осуществления настоящего изобретения. Варианты осуществления настоящего изобретения не ограничены вышеописанными, и возможны различные модификации. Например, соответствующие комбинации конфигураций вариантов осуществления и тому подобного, явным образом проиллюстрированных в данном описании, и конфигурации вариантов осуществления, очевидные для среднего специалиста в данной области техники из описания в данном описании и/или хорошо известного уровня техники, также включены в варианты осуществления данной заявки.
[0133] В вышеописанном варианте осуществления устройство 53 для приложения нагрузки к колесу предусмотрено на опорном устройстве 50 для колеса и выполнено с возможностью регулирования нагрузки на колесо посредством перемещения испытываемого колеса W взад и вперед относительно колеса R, имитирующего рельс. Однако настоящее изобретение не ограничено данной конфигурацией. Например, устройство для приложения нагрузки к колесу может быть предусмотрено на опорном устройстве для колеса, имитирующего рельс, и нагрузка на колесо может быть отрегулирована посредством перемещения колеса R, имитирующего рельс, взад и вперед относительно испытываемого колеса W.
[0134] В вышеописанном варианте осуществления колесо R, имитирующее рельс, соединено с приводным устройством 10, предназначенным для обеспечения вращательного движения, без устройства 20 генерирования крутящего момента, расположенного между ними, и испытываемое колесо W соединено с приводным устройством 10, предназначенным для обеспечения вращательного движения, посредством устройства 20 генерирования крутящего момента. Однако настоящее изобретение не ограничено данной конфигурацией. Например, колесо R, имитирующее рельс, может быть соединено с приводным устройством 10, предназначенным для обеспечения вращательного движения, посредством устройства 20 генерирования крутящего момента, и испытываемое колесо W может быть соединено с приводным устройством 10, предназначенным для обеспечения вращательного движения, без устройства 20 генерирования крутящего момента, расположенного между ними. В альтернативном варианте могут быть предусмотрены два устройства 20 генерирования крутящего момента, и колесо R, имитирующее рельс, может быть соединено с приводным устройством 10, предназначенным для обеспечения вращательного движения, посредством одного устройства 20 генерирования крутящего момента, и испытываемое колесо W может быть соединено с приводным устройством 10, предназначенным для обеспечения вращательного движения, посредством другого устройства 20 генерирования крутящего момента.
[0135] В вышеописанном варианте осуществления множество датчиков трех составляющих силы предусмотрены для опорного устройства 50 для колеса, и измерительный компонент 80 обеспечивает измерение крутящего момента и нагрузки на колесо, действующих на испытываемое колесо W, на основе результатов измерения, полученных множеством датчиков трех составляющих силы. Однако настоящее изобретение не ограничено данной конфигурацией. Например, крутящий момент и нагрузка на колесо могут быть определены на основе результатов измерений, полученных множеством датчиков двух составляющих силы или датчиков одной составляющей силы.
[0136] В вышеописанном варианте осуществления функция средства распределения мощности выполняется в опорном устройстве 32 для колеса, имитирующего рельс, но средство распределения мощности может быть отделено от опорного устройства 32 для колеса, имитирующего рельс. Например, первая передаточная секция 30 может быть не соединена с опорным устройством 32 для колеса, имитирующего рельс, и приводное устройство 10 для обеспечения вращательного движения и первая передаточная секция 30 могут быть соединены с помощью дополнительных средств передачи мощности (например, с помощью передаточного механизма с намотанным элементом или зубчатой передачи). В этом случае ведущий шкив 311 первого ременного механизма 31 и вал приводного устройства 10, предназначенного для обеспечения вращательного движения, на котором должен (должно) быть установлен (-о) шкив или зубчатое колесо дополнительного средства передачи мощности, служат в качестве средств распределения мощности.
[0137] Во втором варианте осуществления, описанном выше, неподвижное основание 51 и шпиндель 527 соединены друг с другом посредством устройства 54 для приложения бокового давления, устройства 55 для придания угла возвышения, устройства 53 для приложения нагрузки к колесу и устройства 56 для приложения угла воздействия, расположенных в данном порядке. Однако настоящее изобретение не ограничено данной конфигурацией. Устройство 54 для приложения бокового давления, устройство 55 для придания угла возвышения, устройство 53 для приложения нагрузки к колесу и устройство 56 для приложения угла воздействия могут быть соединены в любом порядке.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819633C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2021 |
|
RU2836068C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819075C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ДИНАМИЧЕСКОЙ НАГРУЗКИ | 2020 |
|
RU2814966C1 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| ПНЕВМАТИЧЕСКИЙ КОНТРОЛЬНО-ДИАГНОСТИЧЕСКИЙ СТЕНД | 2014 |
|
RU2597630C2 |
| ДЕМПФИРУЕМАЯ ВСПОМОГАТЕЛЬНАЯ ПРИВОДНАЯ СИСТЕМА, ВКЛЮЧАЮЩАЯ ЭЛЕКТРОДВИГАТЕЛЬ / ГЕНЕРАТОР | 2002 |
|
RU2302570C2 |
| Катковый стенд для оценки динамических параметров тележки вагона | 2017 |
|
RU2668485C1 |
| ГИБРИДНАЯ НАСАДКА ДЛЯ ПЫЛЕСОСА | 2006 |
|
RU2391039C2 |
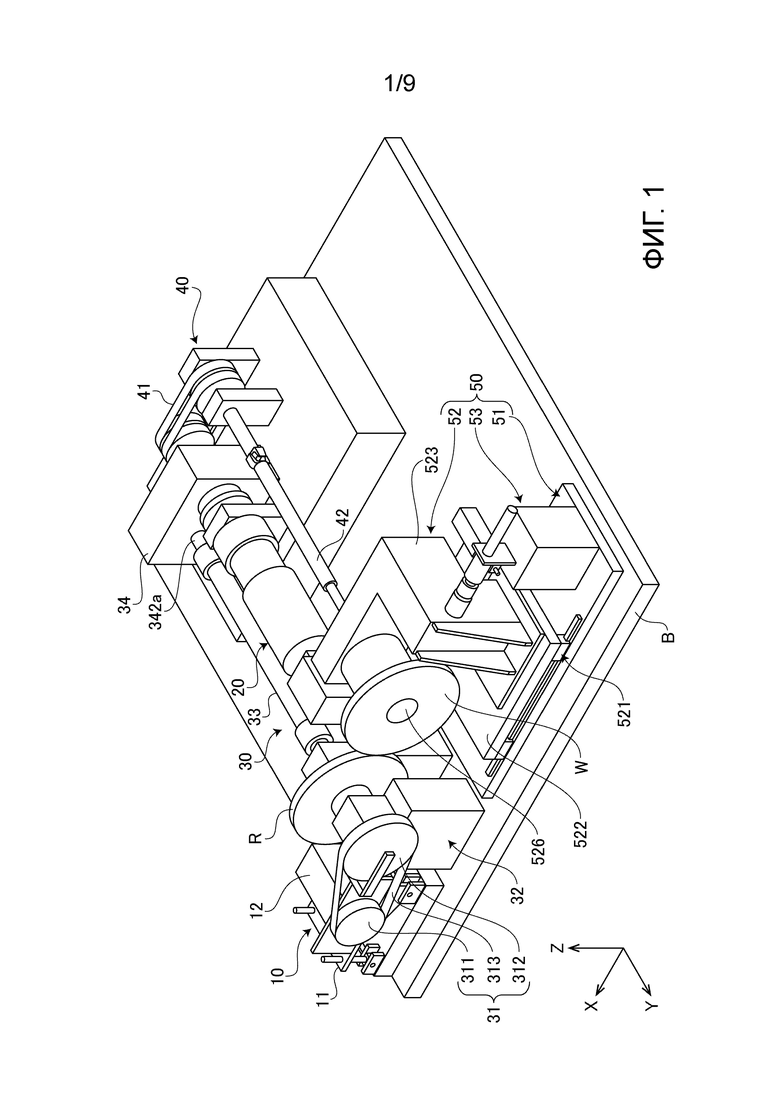
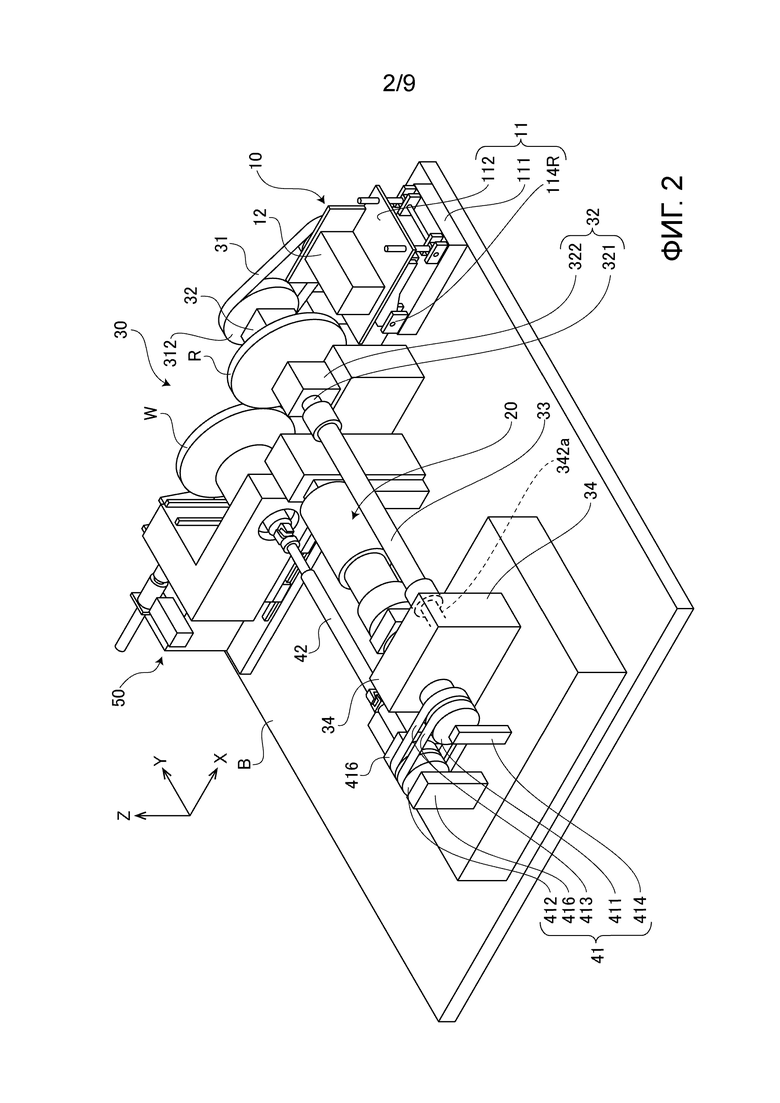
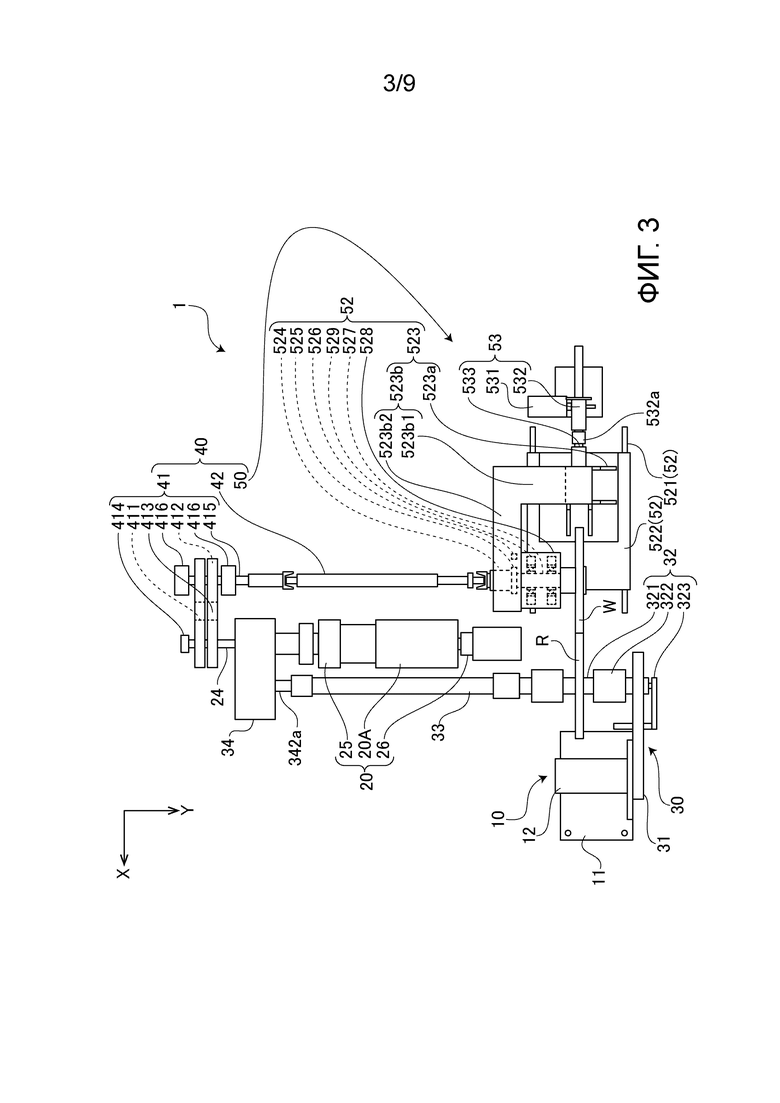


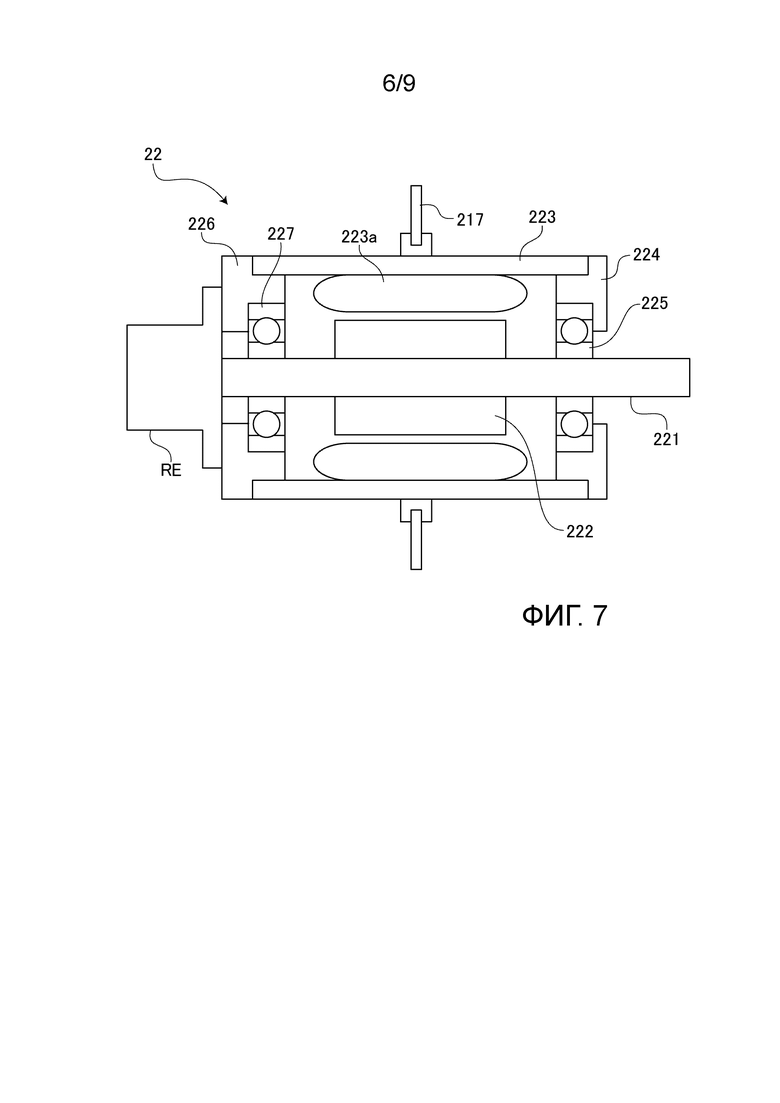
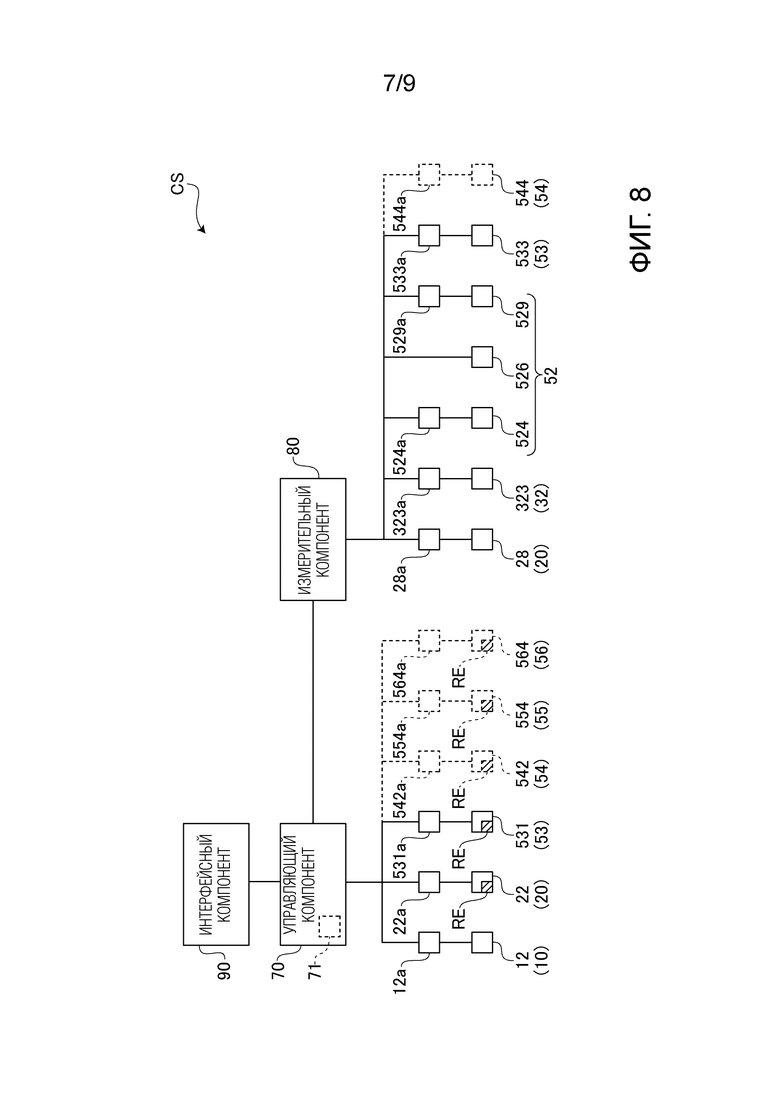
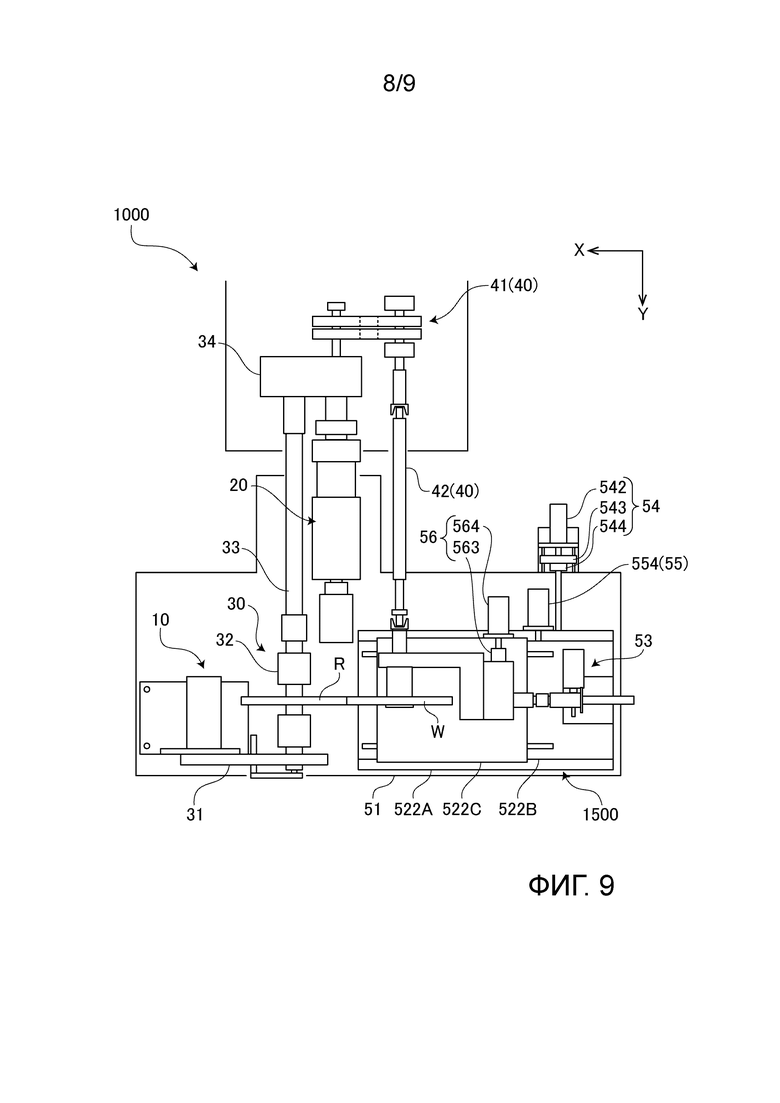
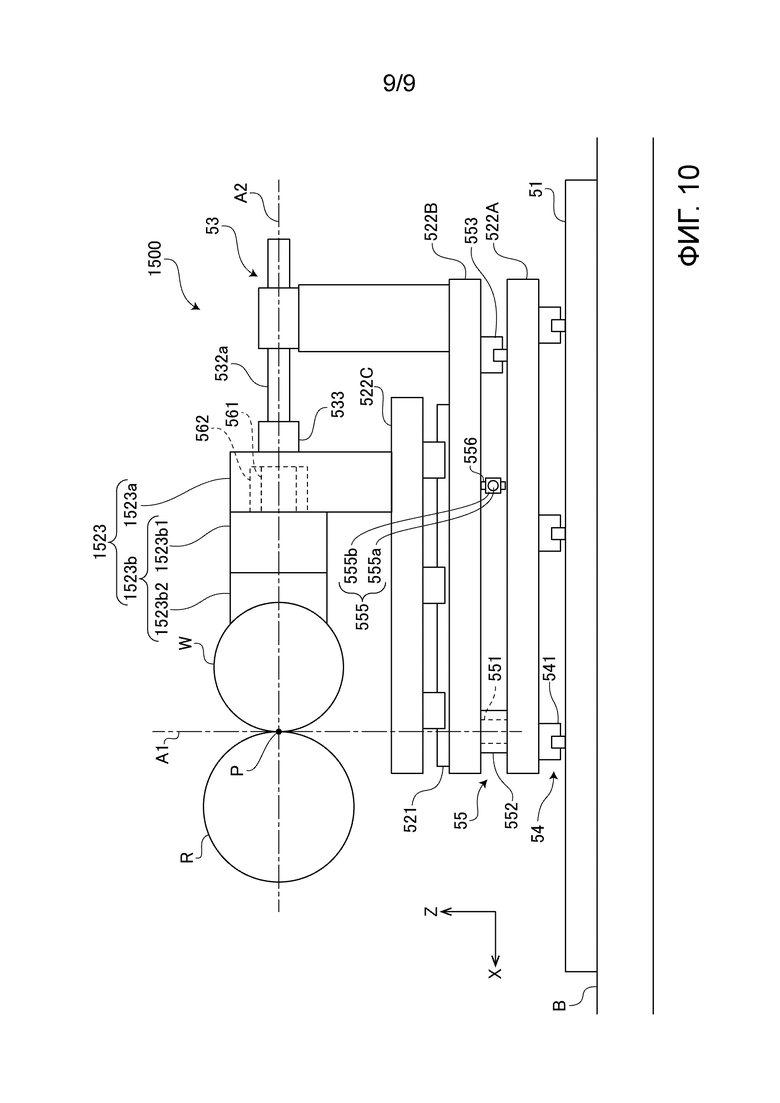
Изобретение относится к автомобильной промышленности. Установка для испытаний колес включает в себя опорное устройство для колеса, имитирующего рельс, выполненное с возможностью обеспечения опоры для колеса, имитирующего рельс, с возможностью его вращения, опорное устройство для колеса, выполненное с возможностью обеспечения опоры для испытываемого колеса с возможностью его вращения в состоянии, когда испытываемое колесо находится в контакте с колесом, имитирующим рельс, первый электродвигатель, выполненный с возможностью обеспечения вращения колеса, имитирующего рельс, и испытываемого колеса, и устройство генерирования крутящего момента, выполненное с возможностью генерирования крутящего момента, подлежащего приложению к испытываемому колесу. Устройство генерирования крутящего момента включает в себя вращающуюся раму, приводимую во вращение посредством приводного устройства, предназначенного для обеспечения вращательного движения, и второй электродвигатель, установленный на вращающейся раме. По меньшей мере одно из колеса, имитирующего рельс, и испытываемого колеса соединено с первым электродвигателем посредством устройства генерирования крутящего момента. Технический результат – улучшение эксплуатационных характеристик устройства. 10 з.п. ф-лы, 10 ил.
1. Установка для испытаний колес, содержащая:
опорное устройство для колеса, имитирующего рельс, выполненное с возможностью обеспечения опоры для колеса, имитирующего рельс, с возможностью его вращения;
опорное устройство для колеса, выполненное с возможностью обеспечения опоры для испытываемого колеса с возможностью его вращения в состоянии, в котором испытываемое колесо находится в контакте с колесом, имитирующим рельс;
первый электродвигатель, выполненный с возможностью обеспечения вращения колеса, имитирующего рельс, и испытываемого колеса;
средства распределения мощности, выполненные с возможностью распределения мощности, генерируемой первым электродвигателем, между колесом, имитирующим рельс, и испытываемым колесом; и
устройство генерирования крутящего момента, выполненное с возможностью генерирования крутящего момента, подлежащего приложению к испытываемому колесу, при этом устройство генерирования крутящего момента включает в себя:
- вращающуюся раму, приводимую во вращение посредством первого электродвигателя; и
- второй электродвигатель, установленный на вращающейся раме,
при этом по меньшей мере одно из колеса, имитирующего рельс, и испытываемого колеса соединено с первым электродвигателем посредством устройства генерирования крутящего момента,
при этом колесо, имитирующее рельс, и испытываемое колесо выполнены с возможностью вращения в противоположных направлениях с по существу одинаковыми окружными скоростями, когда работа второго электродвигателя прекращена, и
при этом номинальная выходная мощность второго электродвигателя равна или больше 3 кВт, и момент инерции вращающегося компонента второго электродвигателя равен или меньше 0,01 кг⋅м2.
2. Установка для испытаний колес по п.1, в которой устройство генерирования крутящего момента включает в себя выходной вал, расположенный коаксиально по отношению к вращающейся раме.
3. Установка для испытаний колес по п.2, в которой:
устройство генерирования крутящего момента включает в себя опорный компонент, выполненный с возможностью обеспечения опоры для вращающейся рамы с возможностью ее вращения;
вращающаяся рама имеет цилиндрическую часть в виде вала, опирающуюся на опорный компонент;
подшипник предусмотрен на внутренней периферии части в виде вала; и
выходной вал проходит через полую часть части в виде вала и опирается на подшипник с возможностью вращения.
4. Установка для испытаний колес по п.1, в которой второй электродвигатель расположен коаксиально по отношению к вращающейся раме.
5. Установка для испытаний колес по п.1, в которой второй электродвигатель прикреплен к вращающейся раме посредством множества стержнеобразных соединительных элементов, расположенных радиально вокруг оси вращения вращающейся рамы.
6. Установка для испытаний колес по п.1, в которой вращающая рама включает в себя цилиндрическую часть для размещения электродвигателя, выполненную с возможностью размещения в ней второго электродвигателя.
7. Установка для испытаний колес по п.1, дополнительно содержащая:
управляющий компонент, выполненный с возможностью управления первым электродвигателем и вторым электродвигателем;
средство измерения частоты вращения, выполненное с возможностью измерения частоты вращения колеса, имитирующего рельс; и
средство измерения крутящего момента, выполненное с возможностью измерения крутящего момента на испытываемом колесе,
при этом управляющий компонент:
- управляет приведением в действие первого электродвигателя на основе результата измерения, полученного средством измерения частоты вращения, и
- управляет приведением в действие второго электродвигателя на основе результата измерения, полученного средством измерения крутящего момента.
8. Установка для испытаний колес по п.1, содержащая устройство для приложения нагрузки к колесу, выполненное с возможностью приложения нагрузки к испытываемому колесу посредством перемещения одного из испытываемого колеса и колеса, имитирующего рельс, вперед и назад друг относительно друга.
9. Установка для испытаний колес по п.1, содержащая устройство для придания угла воздействия, выполненное с возможностью придания угла воздействия посредством поворота одного из испытываемого колеса и колеса, имитирующего рельс, вокруг прямой линии, перпендикулярной к поверхности качения испытываемого колеса, относительно другого колеса.
10. Установка для испытаний колес по п.1, содержащая устройство для придания угла возвышения, выполненное с возможностью придания угла возвышения посредством поворота одного из испытываемого колеса и колеса, имитирующего рельс, вокруг касательной линии относительно другого колеса.
11. Установка для испытаний колес по п.1, содержащая устройство для приложения бокового давления, выполненное с возможностью приложения бокового давления к испытываемому колесу посредством перемещения одного из испытываемого колеса и колеса, имитирующего рельс, в аксиальном направлении относительно другого колеса.
| WO 2014058051 A1, 17.04.2014 | |||
| JP 2006184068 A, 13.07.2006 | |||
| JP 2007271447 A, 18.10.2007 | |||
| JP 2001141616 A, 25.05.2001. |

