назначен для сравнения информации X программы со вспомогательной информацией X или X, поступающей с преобразователя блока 5 пнформацни.
Блок информации предназначен для создания вспомогательной информации, имеющей сдвиг относительно основной на п количество позиций как в сторону lOTCTaBaHnH, так и в сторону опережения, причем в устройстве предусмотрена возможность регулирования числа позиций сдвига.
Датчик веса груза на механизме предназначен лчля определения веса груза, который транспортирует механизм. В случае, если транспортировка груза производится в таре или на поддоне - датчик определяет наличие тары на механизме. Информация с датчика поступает на блок -5, регулируя величину всномогательной информации.
Блок 7 блокировок и управления приводом построен так, что при движении механизма вперед на блок 5 поступает запрет на сдвиг вспомогательной информации в сторону отставаиия, а при движении механизма назад - запрет на сдвиг вспомогательной информации в сторону опережения.
Предлагаемая позиционная система работает следующим образом.
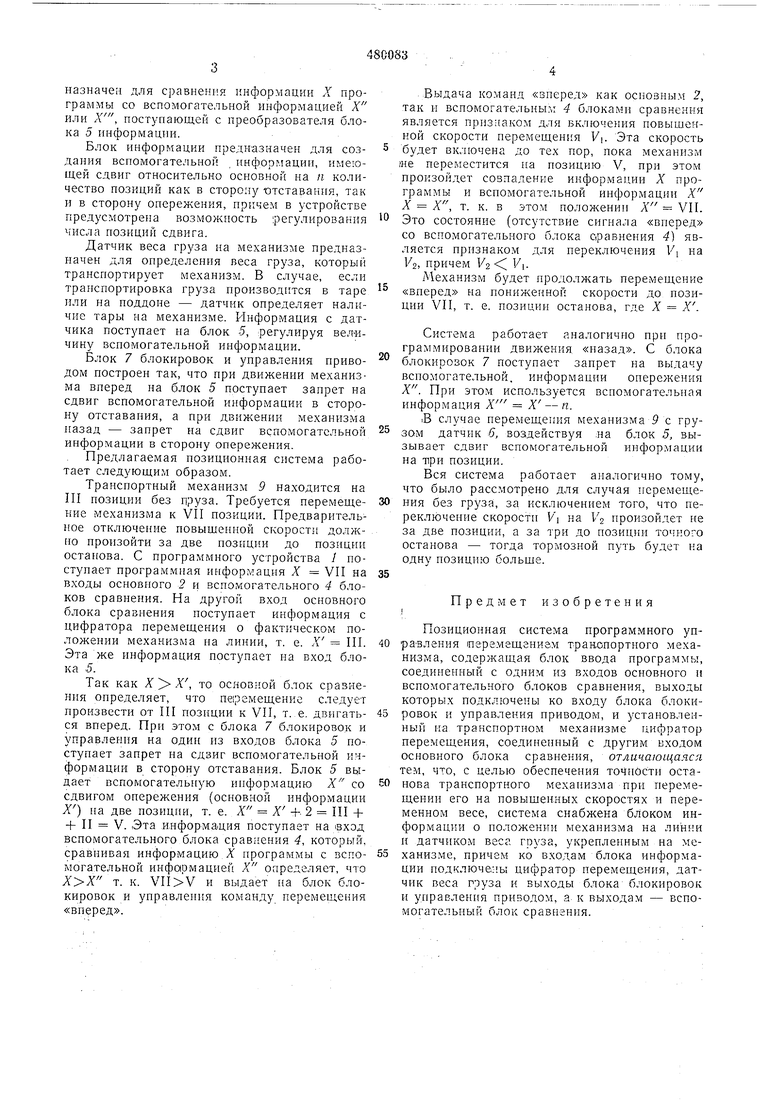
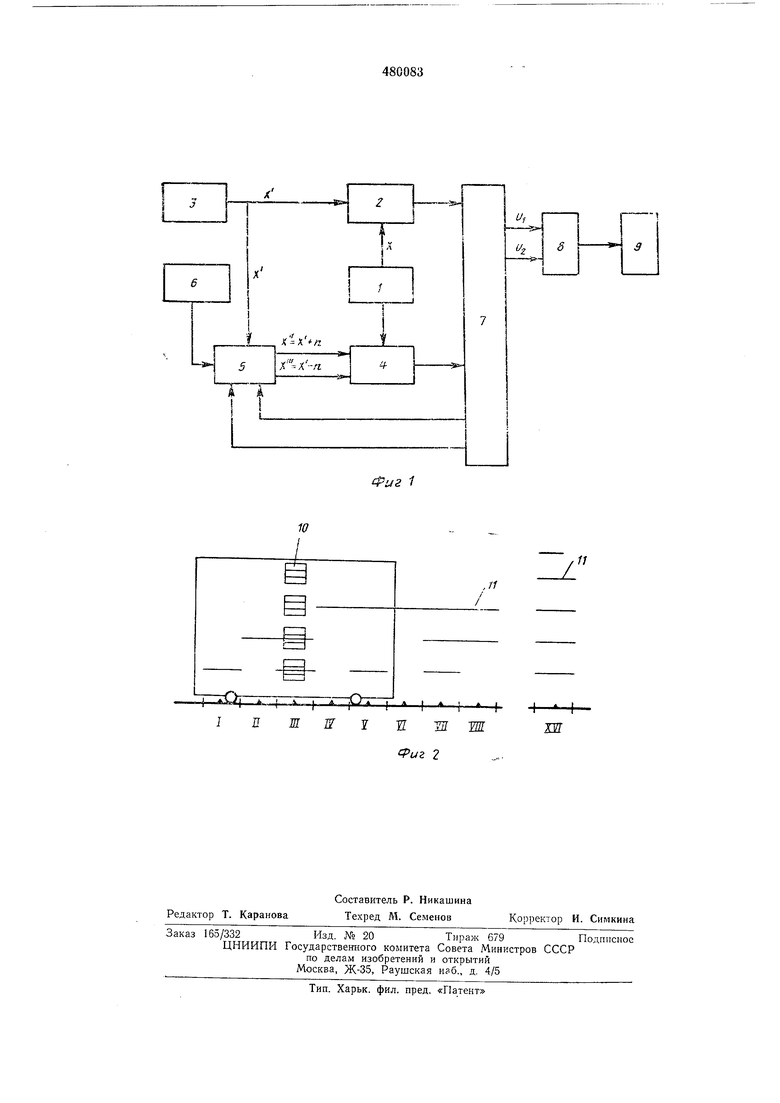
Трансиортный механизм 9 находится на III нозиции без лруза. Требуется перемещение механизма к VII позиции. Предварительное отключение новыщенной скорости должпо произойти за две позиции до позиции останова. С программного устройства 1 ноступает програм.мная информация X VII на входы основного 2 PI вспомогательного 4 блоков сравнения. На другой вход основного блока сравнения поступает информация с цифратора перемещения о фактическом положении механизма на линии, т. е. X III. Эта же информация поступает на вход блока 5.
Так как , то основной блок сравнения определяет, что перемещение следует произвести от III позгщии к VII, т. е, двигаться вперед. При этом с блока 7 блокировок и управления на один из входов блока 5 поступает запрет иа сдвиг вспомогательной информации в сторону отставания. Блок 5 выдает вспомогательную ииформацию X со сдвигом опережения (основной информации X) на две позиции, т. е. X Х III + + II V. Эта информация поступает на вход вспомогательного блока сравнения 4, который, сравнивая информацию Л программы с вспомогательной информацией X определяет, что т. к. и выдает на блок блокировок и уиравления команду перемещения «вперед.
Выдача команд «вперед как основным 2, так н вспомогательны., 4 блоками сравнения является приз; аком для включения повышенной скорости перемещения l/i. Эта скорость
будет включена до тех пор, пока механизм |не переместится на позицию V, при этом произойдет совпадение информации А программы и всиомогательной информации X X X, т. к. в этом положении X VII.
Это состояние (отсутствие сигнала «виеред со вспомогательного блока оравнения 4} является иризнаком для иереключения на , ириче.м 1/2 V{Механизм будет нродолжать перемещение «вперед на пониженной скорости до позиции VII, т. е. позиции останова, где X X.
Система работает аналогично при программировании движения «иазад. С блока
блокировок 7 поступает запрет на выдачу вспомогательной, информации опережения X. При этом используется вспомогательная информация X X - п.
,В случае иеремещения механизма 9 с грузом датчик 6, воз1действуя ,на блок 5, вызывает сдвиг вспомогательной инфор.мации на Т1ри позиции.
Вся система работает аиалогично тому, что было рассмотрено для случая неремещения без груза, за исключением того, что переключение скорости Vl на Уд произойдет не за две иозиции, а за три до позиции точного останова - тогда тормозной путь будет на одну позицию больше.
Предмет изобретения
Позиционная система программного управления перемещением транспортного механизма, содержащая блок ввода программы, соединенный с одним из входов основного и вспомогательного блоков сравнения, выходы которых подключены ко входу блока блокировок и управления приводом, и установленный иа транспортном механизме цифратор перемещения, соединенный с другим входом основного блока сравнения, отличающаяся тем, что, с целью обеспечения точности остаиова транспортного механизма при перемещении его на повышенных скоростях и переменном весе, система снабжена блоком информации о иоложении механизма на линии и датчиком веса груза, укрепленным на механизме, причем ко входам блока информации подключе;.ы цифратор перемещения, датчик веса груза и выходы блока блокировок и управления приводом, а к выходам - вспомогательный блок сравнения.
Фиг 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционная система программного управления перемещением транспортного механизма | 1983 |
|
SU1137476A2 |
| Позиционная система программного управления перемещением транспортного механизма | 1972 |
|
SU447341A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Система для программного управления двумя механизмами | 1987 |
|
SU1478192A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ ГАЛЬВАНИЧЕСКОЙ | 1973 |
|
SU394755A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU615011A1 |
| Устройство для цифрового управления транспортным механизмом | 1977 |
|
SU737958A1 |
| Устройство автоматического управления скоростью транспортного средства | 1982 |
|
SU1117264A1 |
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |
11
Л
Ш
