Изобретение относится к стабилизированным электрическим приводным устройствам и предназначено для использования в лентопротяжных механиз- мах магнитофонов и в электрофонах.
Цель изобретения - расширение функциональных возможностей устройства за счет обеспечения возможности уменьшения нижнего предела частоты вращения вала и обеспечения возможности ее плавного регулирования.
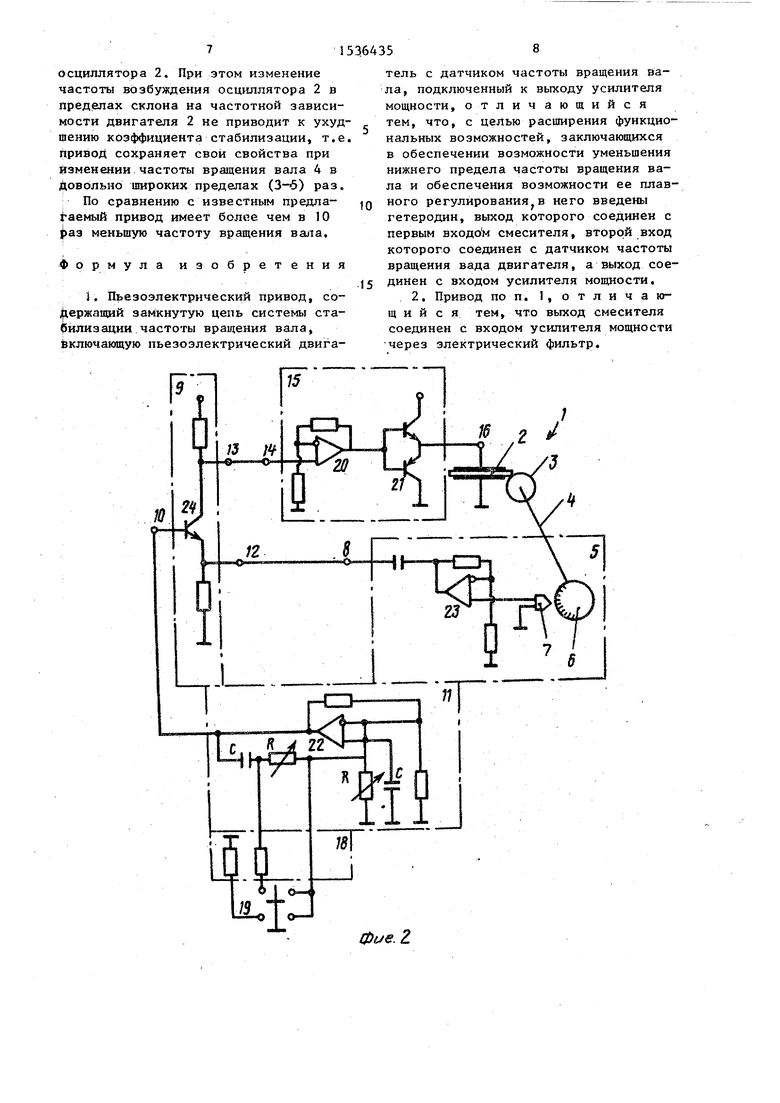
На фиг. 1 приведена блок-схема пьезоэлектрического привода; на фиг. 2 - принципиальная схема одного из вариантов выполнения устройства; на фиг. 3 и 4 - частотные характеристики элементов устройства для различных вариантов выполнения привода.
Пьезоэлектрический привод содержит пьезоэлектрический двигатель 1 с осциллятором 2, ротором 3 и валом 4. На последнем установлен датчик 5 частоты вращения вала 4, содержащий диск 6, закрепленный на валу 4, неподвижный элемент 7 и выход 8. Привод имеет смеситель 9, к одному входу (10) которого подключен гетеродин 11, а другой вход (12) соединен с выходом 8 датчика 5 частоты вращения вала 4.Вы ход 13 смесителя 9 соединен с входом l4 усилителя 15 мощности, выход которого (16) подключен к осциллятору 2, Выход 13 смесителя 9 может быть соединен с входом 14 усилителя 15 через электрический фильтр 17.
Кроме того, привод олжен быть снабжен блоком 18 пуска с кнопкой 19, который может быть соединен с гетеродином 11 .
3 варианте устройства, представленном на фиг. 2, усилитель 15 мощно- сти выполнен на операционном усилителе 20 с транзисторным бустерным каскадом 21. Гетеродин 11 построен по схеме генератора синусоидального напряжения на операционном усилителе 22 с мостом Вина на RC-частотозадающих элементах. Блок 18 пуска в рассматриваемом варианте содержит два допол- нительных резистора, подключаемых (или отключаемых) с помощью кнопки 19 к основным частотозадающим резисторам гетеродина 11. Датчик содержит диск 6, закрепленный на валу 4 и выполненный из ферромагнитного материала с нанесенными на нем магнитными метками. Неподвижным элементом 7 датчика 5 явчяется магнитная головка,
5
0 5 О
0
5
сигнал которой усиливается операционным усилителем 23. Смеситель 9 выполнен на транзисторе 24.
Возможны два варианта работы пьезоэлектрического привода.
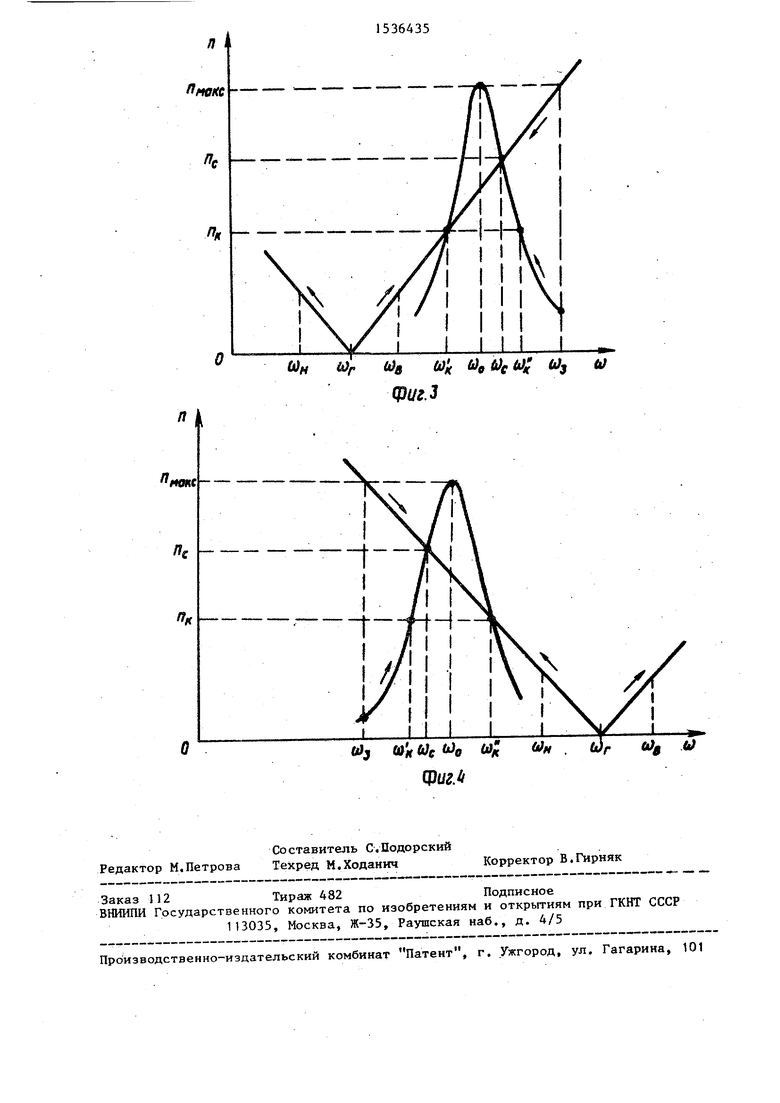
В первом варианте частота гетеродина 11 выбирается несколько ниже левого склона частотной характеристики пьезоэлектрического двигателя 1. На фиг. 3 сплошной линией показана частотная характеристика пьезоэлектрического двигателя 1 (зависимость частоты п вращения ротора от частоты возбуждения осциллятора Ј0) и положение частоты СОГгетеродина 11. Частота С00 возбуждения соответствует максимальной частоте п мокс вращения.
Если с помощью какого-либо внешнего привода начать раскручивать вал 4 привода, то датчик 5 частоты вращения вала вырабатывает сигнал, частота оЗд которого увеличивается пропорционально увеличению частоты п вала 4. Так как сигнал датчика 5 поступает на смеситель 9, на который поступает также сигнал гетеродина 11, то при раскручивании вала 4 на выходе 13 смесителя 9 появляются две боковые частоты: (Ю г - (.0) - нижняя СОИ и (ОЭГ +tOg) - верхняя СЭ8.
С увеличением частоты п раскручивания вала 4 боковые частоты С0„ и СО. движутся в разные стороны (на фиг.З показано стрелками), относительно частоты СОГ гетеродина. Зависимость их изменения от частоты вращения вала 4 показана на фиг, 3 наклонными прямыми.
При частоте вращения вала 4, равной пс, верхняя боковая частота со совпадает с частотой СОС возбуждения осциллятора, находящейся на правом склоне частотной характеристики пьезоэлектрического двигателя.
При отключении внешнего привода в точке пересечения система оказывается в устойчивом состоянии и вращение самопроизвольно поддерживается за счет наличия замкнутой цепи отрицательной обратной связи.
Точка пс сЗсявляется точкой устойчивого равновесия, в которой привод стремится вернуться в эту точку при воздействии дестабилизирующих факторов, т.е. привод в точке ncQCосуществляет стабилизацию частоты вращения вала 4 пьезоэлектрического двигателя 1.
5
Для ввода привода в точку стабилизации необходимо раскрутить вал 4 д частоты, превышающей n K (фиг. 3), при которой верхняя боковая частота установится больше u) K (n K - критическая частота, при превышении кото- рои привод стремится перейти в точку псСОс). Это можно сделать с помощью внешнего двигателя, однако такой способ запуска неудобен.
Привод может быть запущен с помощью .отдельного запускающего генератора с частотой, лежащей в пределах CO K- CO J,. , например равной С00 . При этом вал 4 вращается с частотой п а верхняя боковая частота равна сОзПосле отключения запускающего генератора привод возвращается в точку стабилизации, так как верхняя боковая частота изменяется по наклонной прямой, т.е. частота возбуждения осциллятора перемещается по частотной характеристике пьезоэлектрического двигателя, как показано на фиг. 3 стрелками, до точки n coc их.совпадения.
Конструктивно запускающий генератор может быть выполнен отдельно. Однако более целевообразно для этих целей использовать гетеродин 11, имеющий блок 13 запуска с кнопкой 19
При нажатии кнопки 19 к частото- задающим RC-элемслтам гетеродина 11 подключаются дополнительные элементы блока 18 запуска так, что частота гетеродина становится равной С00, т.е. на двигатель 1 подается частота (00 .
По достижении валом 4 пьезоэлектрического двигателя 1 частоты пмакс вращения кнопка 19 отпускается, гетеродин 11 начинает вырабатывать частоту СОГ и система из точки nMai(t(O возвращается в точку пс сос стабили- з ации.
Зо втором варианте работы привода частота СОГ гетеродина 1J выбирается несколько выше правого склона частотной характеристики пьезоэлектрического двигателя 1 (фиг. 4). При раскручивании вала привода на выходе 13 смесителя 9 возникают две боковые частоты QH и COBi которые с увеличением частоты n вращения вала 4 перемещаются вправо и влево относительно частоты сОг, как показано на фиг. 4 стрелками, по наклонным прямым линиям.
0
5
В точке совпадения линии перемещения нижней боковой частоты сОц с частотной характеристикой пьезоэлектрического двигателя (точка пссЭс ) система оказывается в положении устойчивого равновесия. В этой точке уменьшение или увеличение дестабилизирующим воздействием частоты n вращения вала 4 приводит к такому изменению частоты СО возбуждения осциллятора 2, что частота вращения стремится вернуться в исходную точку псО)с.
Для осуществления пуска привода частота принудительного вращения вала 4 должна быть выше п-, при которой СОН находится в пределах со (Ц
При запуске привода от внешнего 0 генератора частота возбуждения осциллятора должна лежать в пределах О1, -СОJ . Она может быть равна С00. При этом частота вращения вала становится равной пмо,цс, а нижняя боковая 5 частота -Qj. После отключения генератора привод переходит в точку ncCOt.
Во втором варианте выполнения привода при его запуске от гетеродина 11 частота последнего должна пони- жатьср до значения С00. -Что понижение может осуществляться путем отключения с помощью кнопки 19 дополнительных элементов блока 18 запуска от часто- тозадающих RC-элементов гетеродина.
Коэффициент стабилизации скорости пьезоэлектрического привода определяется коэффициентом передачи частото- независимого звена, который примерно равен
0
5
40
v ®±Ь nMaiccQc ft -...
Q0
где Q - добротность по скорости пьезоэлектрического двигателя (Qc
Uo
ш -, uCO ширина частотной характе&(0
ристики на уровне 0,7 по частоте вращения ротора).
Предлагаемый привод по сравнению с известным позволяет обеспечить плавное регулирование частоты вращения вала 4, что может быть получено путем плавной перестройки частоты гетеродина 11 посредством плавного изменения его частотезадающих элементов. Перестройка частоты гетеродина II вызывает смещение боковых частот, т.е. изменение частоты возбуждения
фие. 2.
U
/
1536435
MB tt K а, ь)с () tif, Фиг.З
ft/

| название | год | авторы | номер документа |
|---|---|---|---|
| Лентопротяжный механизм | 1987 |
|
SU1578758A1 |
| Лентопротяжный механизм кассетного магнитофона | 1986 |
|
SU1628087A1 |
| Устройство для нанесения магнитных меток на ротор индукционного датчика | 1987 |
|
SU1610501A1 |
| Устройство для измерения нажатий щетки на коллектор электрических машин | 1986 |
|
SU1401542A2 |
| Устройство для ранней диагностики образования и развития микротрещин в деталях машин и конструкциях | 2022 |
|
RU2788311C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИБОР ВРЕМЕНИ, СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ЭЛЕКТРОЭНЕРГИИ, ПРИВОДЯЩЕЙ В ДЕЙСТВИЕ ЭЛЕКТРИЧЕСКИЙ ПРИБОР ВРЕМЕНИ | 2013 |
|
RU2551484C2 |
| ВЫСОКОЧУВСТВИТЕЛЬНЫЕ СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ/МАССЫ С ИСПОЛЬЗОВАНИЕМ СИСТЕМЫ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 2005 |
|
RU2334204C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА КОНТРОЛЯ НАД УЧАСТНИКАМИ ДОРОЖНОГО ДВИЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ ВОЗНИКНОВЕНИЯ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ ПРИ ДОРОЖНОМ ДВИЖЕНИИ | 2011 |
|
RU2467399C1 |
| Прецизионный пьезоэлектрический привод | 1991 |
|
SU1810976A1 |
| СИСТЕМА ДЛЯ ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 1993 |
|
RU2070124C1 |
Изобретение относится к стабилизированным пьезоэлектрическим приводным устройствам, предназначено для использования в лентопротяжных механизмах магнитофонов и в электрофонах и позволяет расширить функциональные возможности привода за счет обеспечения возможности уменьшения нижнего предела частоты вращения вала и ее плавного регулирования. Привод содержит гетеродин 11 и смеситель 9, один вход которого соединен с выходом гетеродина 11, а другой подключен к выходу датчика 5 частоты вращения вала 4. Плавно меняя частоту гетеродина 11, можно плавно регулировать частоту вращения вала 4. 1 з.п. ф-лы, 4 ил.
л
пояс
П,
/7,
to it ые ы0 w;
фиг.
о/. 4;
| Система питания пьезоэлектрического привода | 1978 |
|
SU728186A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Пьезоэлектрический привод | 1979 |
|
SU790044A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
