Изобретение относится к ходовым механизмам машин, а именно к шагающим ходовым механизмам.
Цель изобретения - улучшение маневренности машины.
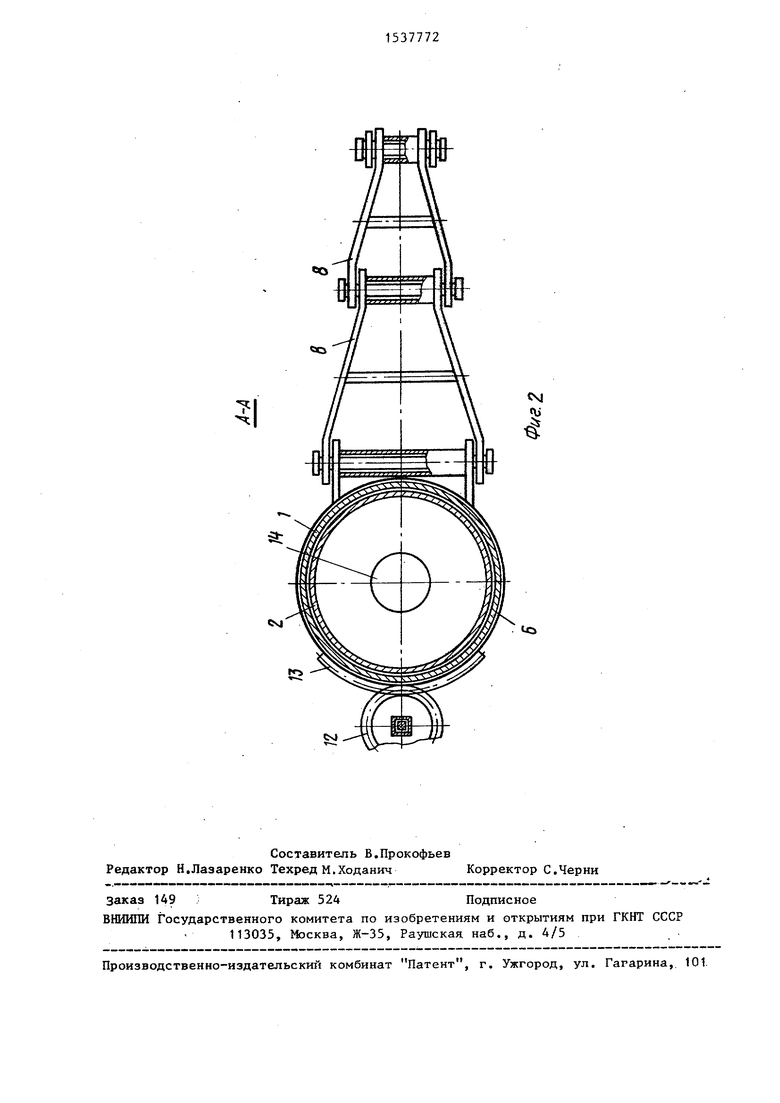
На фиг. 1 изображен шагающий ходовой механизм, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1.
Шагающий ходовой механизм включает неподвижный корпус телескопической стойки 1, в которую встроена нижняя часть 2, соединенная шаровым шарниром 3 с башмаком 4, установленным на лыжи 5. К подвижной части 2 телескопической стойки 1 закреплено опорное кольцо 6, зафиксированно в осевом направлении фланцем 7. Двух звенный рычаг 8 шарнирно соединен с опорным кольцом 6 и лыжей 5 с возможностью поворота лыжи 5 относительно своей продольной оси. На неподвижном корпусе телескопической стойки 1 расположен двигатель 9 привода поворота лыжи 5, соединенный через вал 10 с телескопическим валом 11, на конце которого установлена зубчатая шестерня 12, находящаяся в зацеплении с зубчатым сектором 13 опорного кольца 6. Отдельные звенья телескопического вала 11 обеспечивают передачу крутящего момента от двигателя 9 на зубчатый сектор 13. Вертикальный силовой гидроцилиндр 14 встроен в телескопическую стойку 1, а горизонтальный силовой гидроцилиндр 15 соединяет башмак 4 и лыжу 5. Перемещаемый объект оснащен не менее чем тремя шагающими механизмами.
Шагающий ходовой механизм работает следующим образом.
При прямолинейном движении в циклах перемещения башмаков 4 по лыжням 5 и переноса лыж 5 относительно башмаков 4 каждый двухзвенный рычаг
5
0
5
0
5
0
5
8 поворачивается своими звеньями вокруг собственного центрального шарнира. При этом положение опорного кольца 6 фиксируется двигателем 9 через вал 10 и шестерню 12. Двухзвенный рычаг 8 обеспечивает необходимое сопротивление повороту, вызванному действием внешних силовых факторов, стремящихся повернуть лыжу 5 вокруг вертикальной оси шарового шарнира 3.
Для выполнения поворота объект устанавливают на опорную базу, а все шагающие ходовые механизмы поднимают над поверхностью грунта с помощью гидроцилиндров 14. Синхронно на всех механизмах включают двигатели 9, которые через телескопические валы
11и зубчатые зацепления шестерен
12с зубчатыми секторами 13 поворачивают опорные кольца 6 и вместе с ним двухзвенные рычаги 8 и лыжи 5 на заданный угол.
Формула изобретения
Шагающий ходовой механизм, включающий телескопические стойки с гидроцилиндрами, шарнирно соединенные с башмаками и лыжами, одни концы которых при помощи гидроцилиндров соединены с башмаками, а другие - с концами двуплечих рычагов, отличающийся тем, что, с целью улучшения маневренности машины, он снабжен приводами поворота лыж вокруг телескопических стоек, каждый из которых выполнен из жестко закрепленного на конце телескопической стойки опорного кольца с зубчатым сектором, кинематически связанного с двигателем привода, при этом свободный конец двуплечего рычага, шарнирно связан с опорным кольцом.
CsJ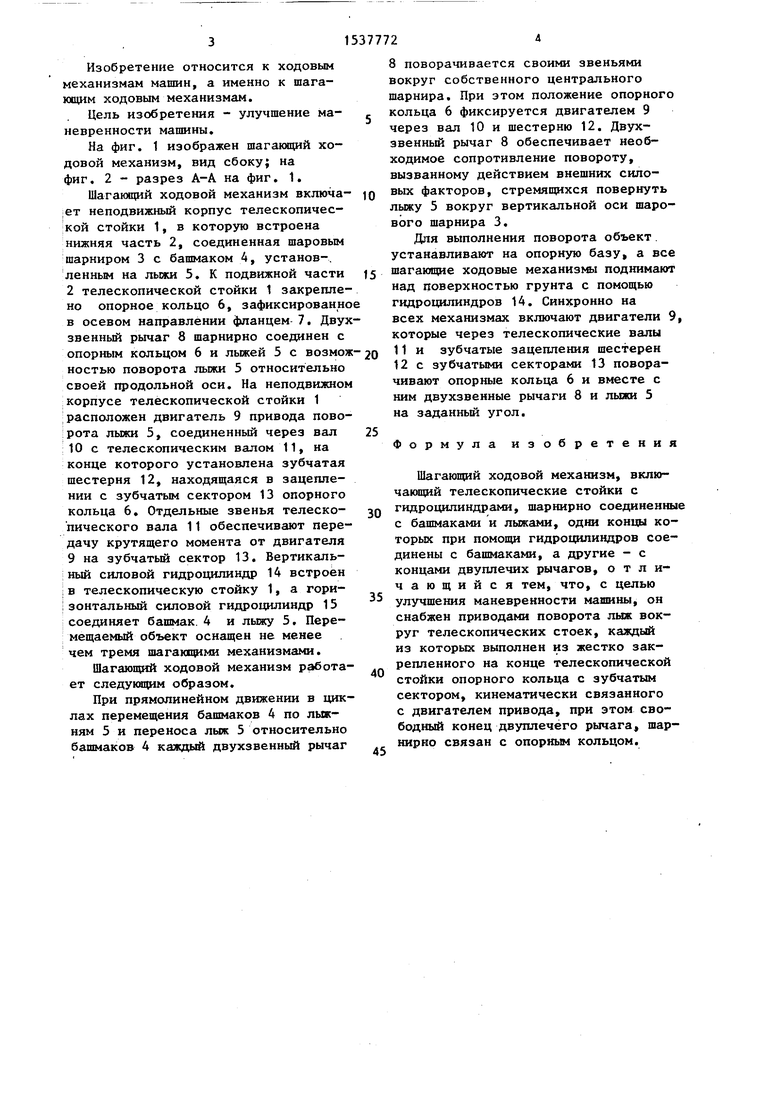
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий ходовой механизм | 1981 |
|
SU1032124A1 |
| МЕХАНОГИДРАВЛИЧЕСКИЙ КОМБАЙН | 2003 |
|
RU2244826C1 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| ЭКРАНОЛЕТ, ЕГО ВЗЛЕТНО-ПОСАДОЧНОЕ УСТРОЙСТВО И ПРИВОД СКЛАДЫВАНИЯ КРЫЛА | 1995 |
|
RU2099217C1 |
| ШАГАЮЩИЙ ХОДОВОЙ МЕХАНИЗМ ТРАНСПОРТНО-МОНТАЖНОГО СРЕДСТВА | 2016 |
|
RU2648370C2 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| Ходовая часть грузоподъемного средства | 1980 |
|
SU933611A1 |
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
| РЫЧАЖНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ НОГИ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2402450C2 |
| КОЛЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2423281C1 |
Изобретение относится к шагающим ходовым механизмам. Цель - улучшение маневренности. Устройство содержит телескопическую стойку 1 с подвижной нижней частью 2, которая соединена с гидроцилиндром 14, а шарниром 3 - с башмаком 4 и лыжей 5. К подвижной части 2 закреплено опорное кольцо 6, которое через двухзвенный рычаг 8 шарнирно соединено с кольцом 6 и лыжей 5. На стойке 1 расположен двигатель 9, который через телескопический вал 11, шестерню 12 и зубчатый сектор 13 опорного кольца 6 поворачивает в горизонтальной плоскости лыжу 5 на заданный угол. Перемещаемый объект опирается не менее чем на три ходовых механизма, при этом поворот всех лыж 5 производится синхронно. 2 ил.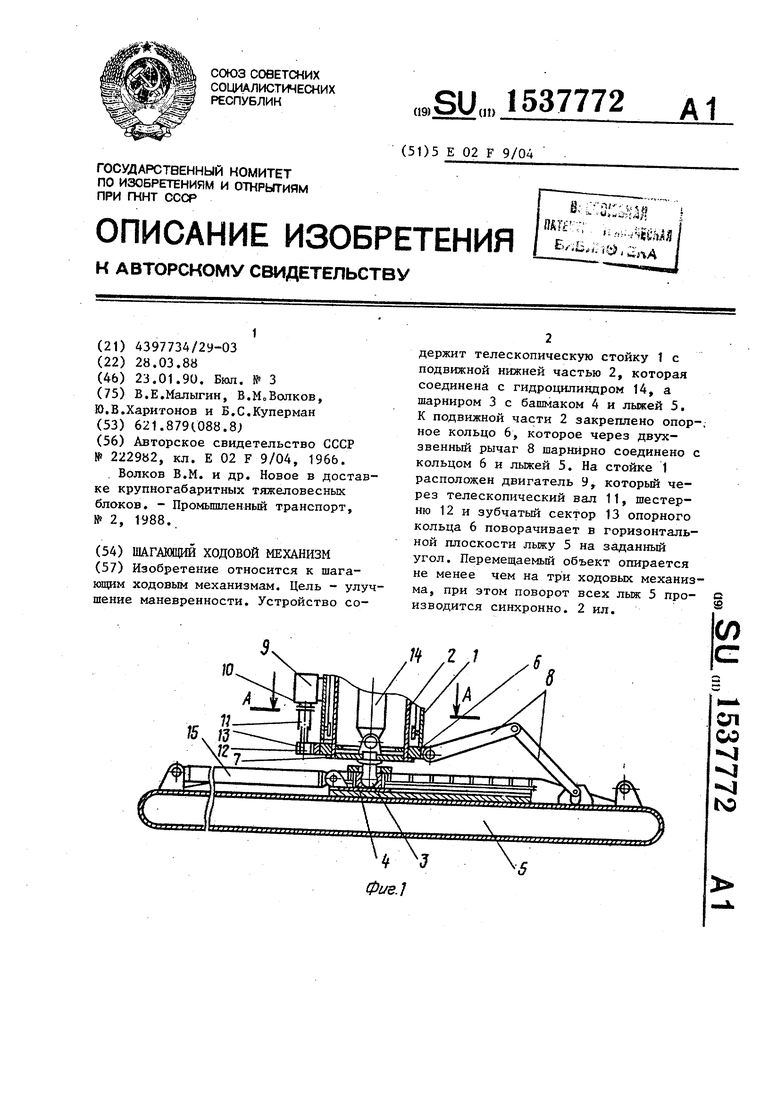
| ХОДОВОЙ МЕХАНИЗМ ТЯЖЕЛЫХ МАШИН | 1967 |
|
SU222982A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Волков В.М | |||
| и др | |||
| Новое в доставке крупногабаритных тяжеловесных блоков | |||
| - Промышленный транспорт, № 2, 1988. | |||
