Изобретение относится к робототех- нике.
Цель изобретения - упрощение кон струкции за счет исключения сложного механизма кинематической развязки движения звеньев исполнительного органа манипуляционного устройства.
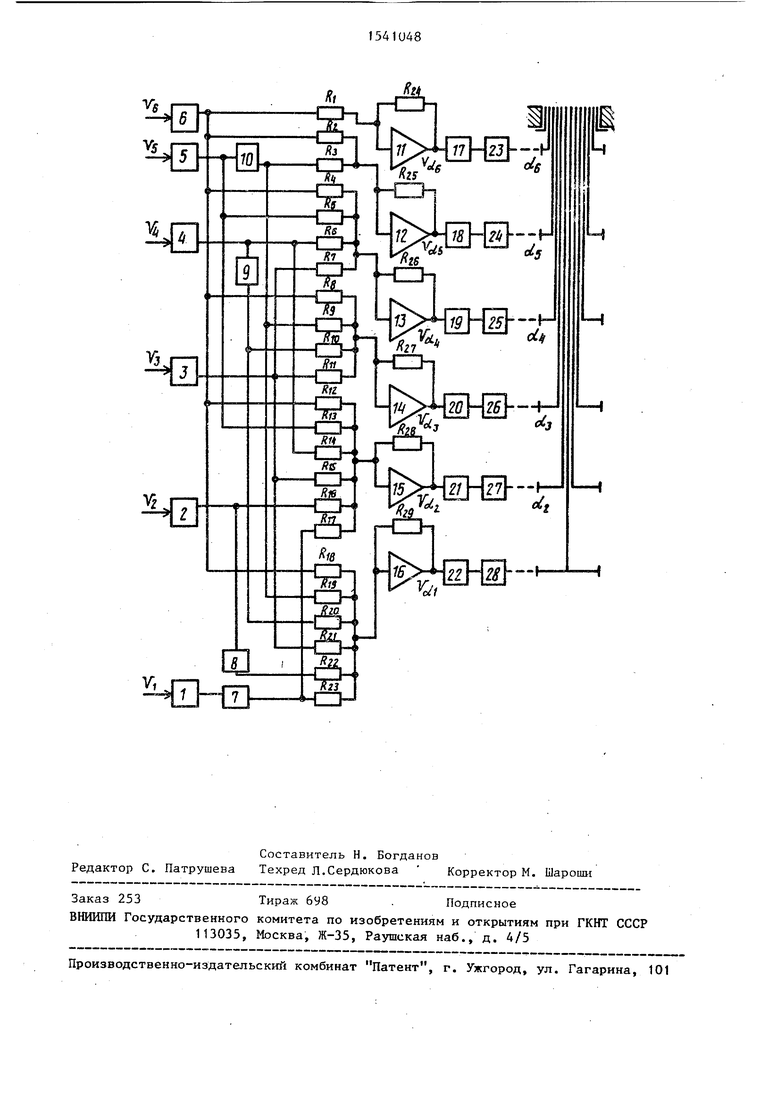
На чертеже представлена схема устройства
Схема содержит согласующие усилители 1-6, инверторы 7-10, суммирующие усилители 11-16, приводы перемещения степеней подвижности исполнительного органа, включающие в себя усилители 17-22 мощности и исполнительные элементы 23-28 (двигатели с соответствующими кинематическими передачами) .
Связь между входными Ј, и выходными Q; углами поворота многозвенного
9
1
«
исполнительного органа определяется следующим выражением
1
J-Mi U
где QI - вращение кисти; QI - изгиб кисти; 93- вращение предплечья; 04 изгиб предплечья; 85- изгиб плеча; QS- вращение плеча; вектор углов поворота исполнительных элементов 23-28, вызывающих соответствующие движения звеньев исполнительного органа;
с - передаточная матрица многозвенного механизма. В общем виде матрица с определяется структурой исполнительного оргаиа манипуляционного устройства. Так, например, для манипулятора МЭМ 10 СДГ она имеет вид
для независимого движения звеньев необходимо, чтобы
М -М
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| Рука манипулятора | 1984 |
|
SU1220781A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
Изобретение относится к робототехнике. Целью изобретения является упрощение конструкции за счет исключения механизма кинематической развязки движений звеньев исполнительного органа. Для этого на входы приводов перемещения степеней подвижности исполнительного органа включены суммирующие элементы, которые соответствующим образом преобразуют входные управляющие сигналы устройства в необходимые сигналы управления каждым из приводов. В зависимости от структуры электрической схемы взаимосвязей суммирующих элементов можно получить либо полную развязку движений звеньев исполнительного органа, либо желаемую взаимосвязь этих движений. 1 ил.
с
1Кце п - передаточное число в коничес- I ких зубчатых передачах.
I
Для независимого движения звеньев 15 Необходимо, чтобы матрица с была диагональной. Связь между сигналами управления v и сигналами, поступающий на вход усилителей мощности (v.) , имеет вид20
W Ы -Ы
де с Л - передаточная матрица элек- 25 трической схемы развязки движений
ы -ы-Н Н-ы-и
г -I30
Где - матрица управления манипу.ряционным устройством, следовател - п, СЛ lcvl- c ТогДа связь МРЛЦ.-У v«i, и vi имеет вид
Дъ.ЫчГЫ-МКГЧ Ф
Уравнение (1) показывает кат цолж- ha быть организована логика управления манипуляционного устройства с же- даемой взаимосвязью движений. Физи- 40 чески это означает какие исполнительные элементы должны вступать в работу при подаче на вход устройства соответствующего сигнапа управления для получения необходимого перемещения д5 звеньев исполнительного органа,, Так,
0
5 0
5
0
40 д5
Следовательно, например, для сигнапа поступающего на усилитель мощности исполнительного элемента 22 (вращение кисти) можно записать следующую функцию:
vi-n vz + vvn Vh v + Vfe
Сложение данных сигналов осуществляется на усилителе 16, коэффициенты 1 или п подбираются с помощью под- строечных резисторов R,ft- R, .Инверсия входных сигналов осуществляется с помощью инверторов 8, 99 10. Аналогично, исходя из уравнения О), подбираются соответствующие функции и для других исполнительных элементов. Для осуществления произвольной (желаемой) взаимосвязи движений су Ј Е, поэтому необходимые в этом случае функции для сигналов управления исполнительными элементами можно получить из
Формула изобретения
Манипуляционное устройство, содержащее многозвенный исполнительный орган, приводы перемещения каждой из степеней подвижности исполнительного органа, а также средство для развязки движения степеней подвижности исполнительного органа, отличающееся тем, что, с целью упрощения конструкции, средство для развязки движений степеней подвижности выполнено в виде электрической схемы соответствующих суммирующих элементов , включенных на вход каждого из приводов перемещения степеней подвижности.
