Изобретение относится к робото- и .via- нипуляторостроению и может быть исполь- :i{)ii;iMo в исполнительных органах манипуляторов и роботов.
Одной из основных проблем в этой об- ..lacTn Я 5лиется нроблема создания испол- и(телькых органов, приближающихся по своим параметрам к параметрам руки человека.
Цель изобретения - увеличение надежности работы руки манипулятора путем улучшения герметизации шарниров.
Указанная цель достигается за счет рациональной взаи.мосвязи движений, которая гюзволяет исключить зубчатое зацепление венцов, контактирующих с внешней средой.
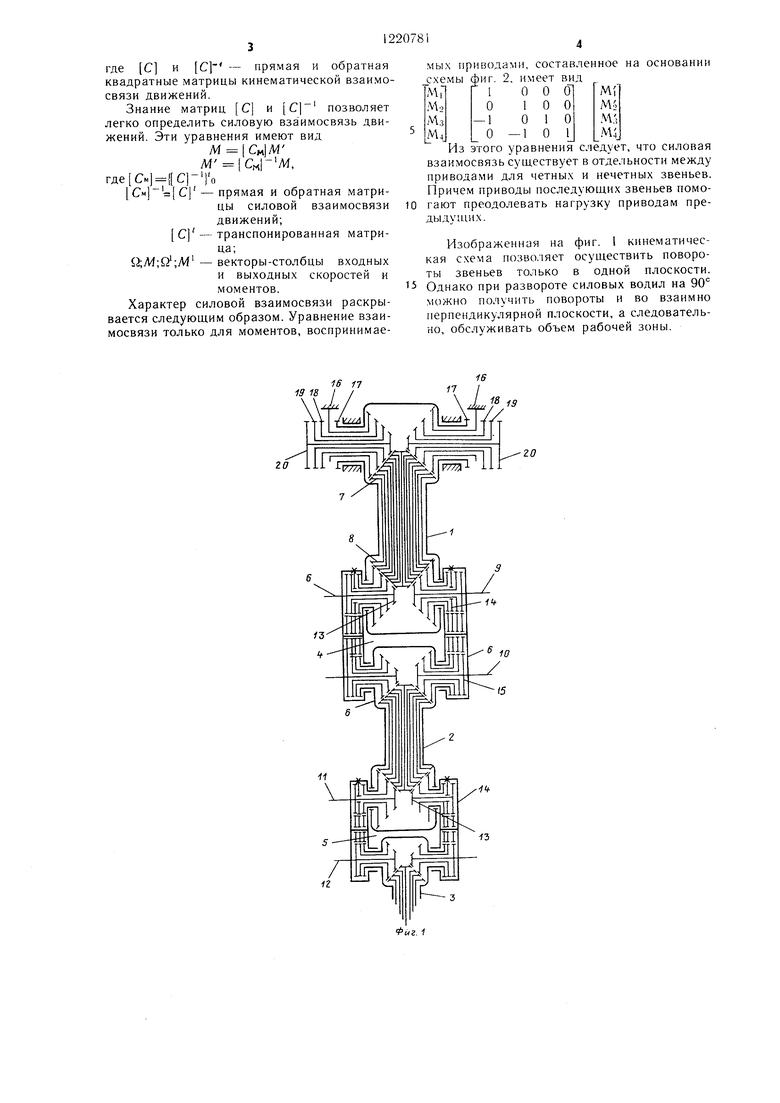
На фиг. 1 показана кинематическая схема руки манипулятора; на фиг. 2 - схема кинематической взаимосвязи движений звеньев руки манипулятора.
Устройство содержит полые звенья 1-3, соединенные шарнирами 4 и 5, каждый из которых состоит из двух полых промежуточных эле.ментов 6. Внутри полых звеньев расположены трубчатые валы, оканчивающиеся ведомыми 7 и ведущими 8 зубчатыми колесами. По осям цапф 9-12, являющихся осями поворота звеньев, расположены сателлитные зубчатые колеса 13, которые трубчатыми валами жестко состыкованы с ведущими 14 и ведомыми 15 цилиндрическими зубчатыми колесами, расположенными в полых промежуточных элементах 6. Ведущие 8 и ведомые 7 зубчатые колеса каждого трубчатого вала входят в зубчатые зацепления с сателлитами, расположенными с разных сторон от продольной оси полых звеньев, образуя передаточные отнощения между сателлитами каждой кинематической цепи равные +1.
Сателлиты 13 в цапфах 9 и 11 жестко состыкованы с корпусами предыдущего и последующего промежуточных элементов, а трубчатые валы, подводящие движения этим сателлитам, - через цилиндрические передачи, имею1цие передаточные отнощения -|-1, замкнуты на корпуса предыдущих промежуточных элементов, первый из которых связан с осрюванием 16.
Подвод движений к звеньям осуществляется через входные зубчатые колеса 17-20 (причем зубчатые колеса 17 трубчатыми валиками жестко состыкованы с полым звеном 1).
Устройство работает следующим образом.
При вращении входных зубчатых колес 17 в какую-либо сторону полое звено 1 поворачивается относительно оси расточки основания 16. Если в это время приводы других подвижных звеньев остановлены (зубчатые колеса 17-19 неподвижны), то ведомые конические колеса 7 обкатываются по своим сателлитам, приводя во вращение трубчатые валы и ведущие зубчатые колеса 8. Так как передаточные отнощения между сателлитами каждой цепи равны -}-, то сател
0
0
0
5
0
5
ЛИТЫ 13 цапфы 9 синфазно с промежуточными элементами 6 поворачиваются в противоположную повороту звена 1 сторону на тот же угол.
При повороте предыдущего звена последующие промежуточные элементы и полые звенья совершают плоскопараллельные движения в некоторой неподвижной системе координат. Очевидно, что при повороте звена 2 последующие про.межуточные эле.менты и полые звенья также совершают плоскопараллельные движения и т. д,
Таким образом, заложенный принцип взаимосвязи движений обеспечивает плоскопараллельные перемещения звеньев исполнительного органа.Аналогичная картина происходит при повороте промежуточных элементов 6 относительно осей цапф 9 и 11. Если при повороте промежуточных элементов затормозить ведущие цилиндрические колеса 14, то ведомые колеса 15 будут отрабатывать в противоположную сторону угол поворота промежуточных элементов, причем эти углы но величине одинаковы, если передаточные числа цилиндрических передач равны +1. При повороте промежуточных элементов последующие звенья также совершают плоскопараллельные перемещения. Этим обеспечивается наиболее рациональная силовая взаимосвязь движений между приводами.
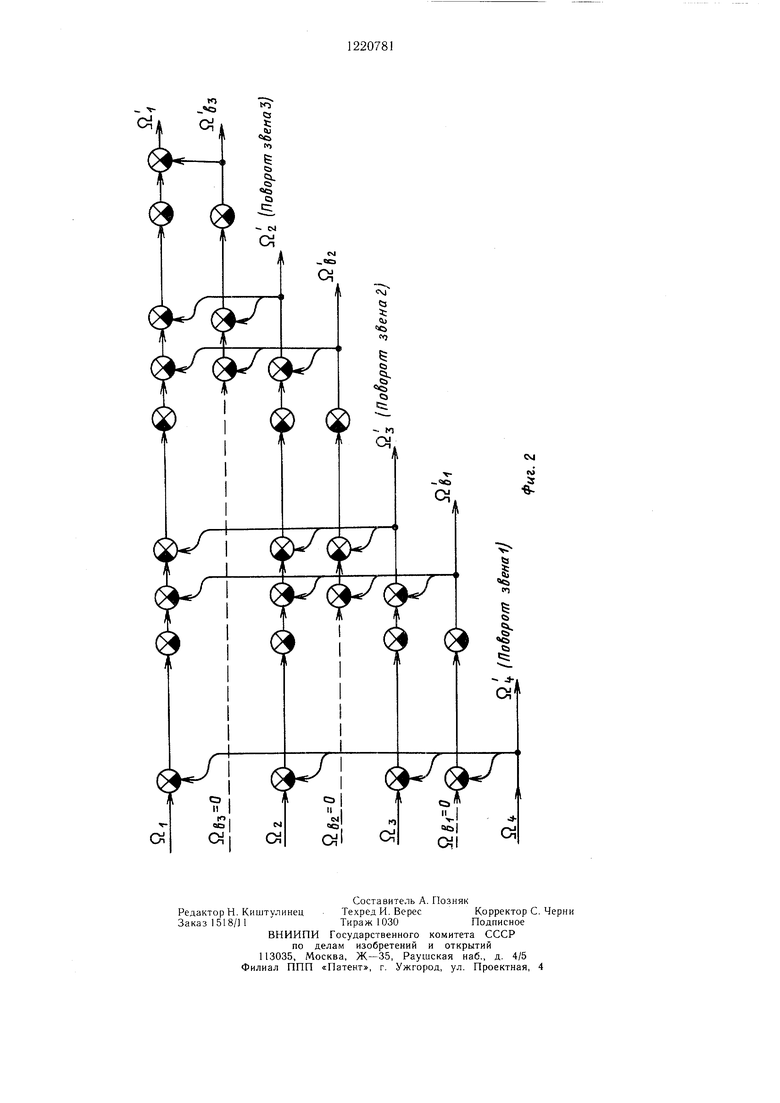
На фиг. 2 изображена схема взаимосвязи движений такого шарнирного соединения. Схема дополнена (по логике взаимосвязи) четвертым звеном и третьей парой промежуточных элементов. При изображении схемы параллельные кинематические ветви заменены одинарными. Схема взаимосвязи указывает между собой относительные (собственные) движения приводов и их кинематических элементов (горизонтальные линии) и переносные (налогаемые кинематической взаимосвязью) движения (вертикальные линии). Элемент сравнения на схеме представляет передачу движения от одного кинематического звена другому, причем если движение следует через зачерненный сектор, то происходит пере.мена знака движения. Если в элементе сравнения использован только один вход, это значит, что переносное (или собственное) движение в кинематической структуре заложено, но не используется.
На фиг. 2 обозначено: Й|,Й2,Оз,Г1( - частоты Ефащения входных зубчатых колес 17, 18, 19 и 20; Qi ,Q2,i,i( - угловые скорости изгиба звеньев; f2i i,Q&2,3 - подразумеваемые, но не использованные входы движений силовых водил; ,2,з - угловые скорости силовых водил.
Введение условных входов движения Ш|, позволяет описать движение системы матричным уравнением вида 7
г С|- ц|
где С и С - прямая и обратная квадратные матрицы кинематической взаимосвязи движений.
Знание матриц С и позволяет легко определить силовую вза имосвязь движений. Эти уравнения имеют вид
М См|М М (СмГ М, где С« { С - } о
См ( - прямая и обратная матрицы силовой взаимосвязи движений;
- транспонированная матрица;
й;уМ;0 ;М - векторы-столбцы входных и выходных скоростей и моментов.
Характер силовой взаимосвязи раскрывается следующим образом. Уравнение взаимосвязи только для моментов, воспринимаемых приводами, составленное на основании схемы фиг. 2, имеет вид
Ml
М.з
М4
О
О О
MI M. м
.
°|
0100
1010
о -1 о у
Из этого уравнения следует, что силовая взаимосвязь существует в отдельности между приводами для четных и нечетных звеньев. Причем приводы последующих звеньев помо- гают преодолевать нагрузку приводам предыдущих.
Изображенная на фиг. I кинематическая с.хема позволяет осуществить повороты звеньев только в одной плоскости. Однако при развороте силовых водил на 90 можно получить повороты и во взаимно перпендикулярной плоскости, а следовательно, обслуживать объем рабочей зоны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| Манипулятор | 1987 |
|
SU1537516A1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
19 18
16 п
(3
Составитель А. Позняк
Редактор Н. КиштулинецТехред И. ВересКорректор С. Черни
Заказ 1518/11Тираж 1030Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
