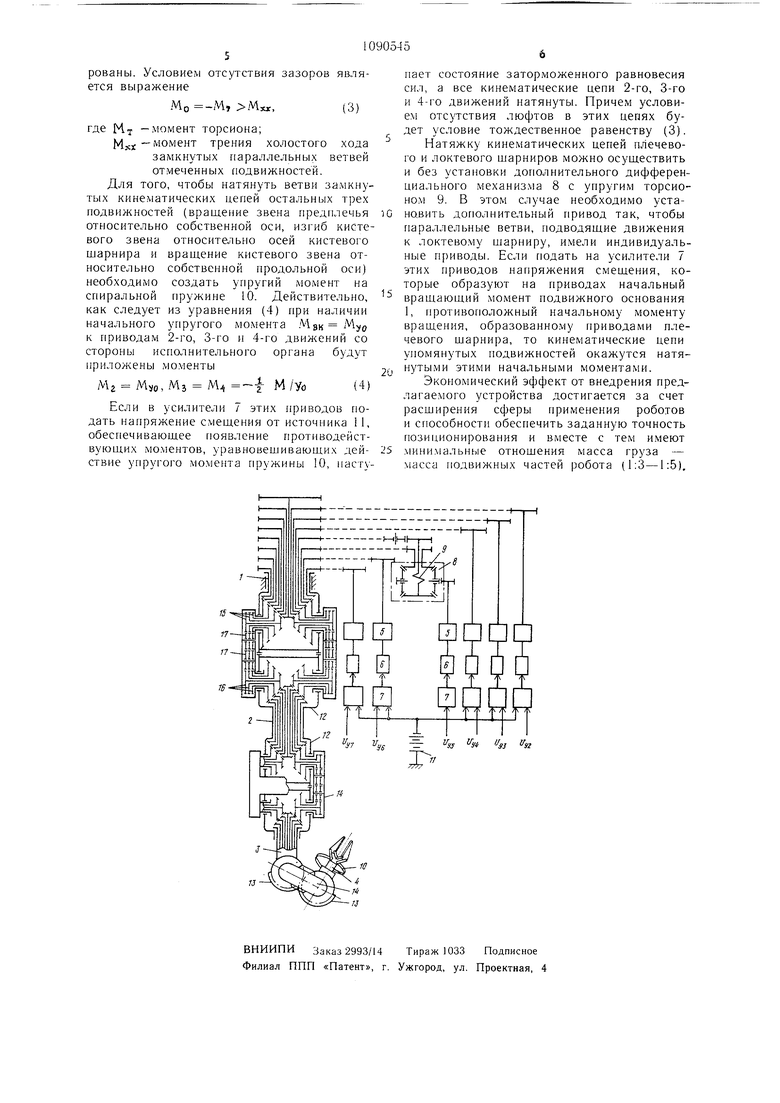
Изобретение относится к манипулятороробототехнике и может быть использовано в качестве исполнительных механизмов для роботов универсального типа. Известна механическая рука, содержащая подвижные плечевое, локтевое и кистевое звенья, выполненные в виде цилиндрических полых шарнирно сочлененных корпусов, внутри которых размещены приводные концентрически размещенные трубчатые валы и кинематическими цепями управления связанные между собой в щарнирах трехзвенных дифференциальных механизмов, и расположенные на основании электродвигатели каждой степени подвижности руки, а также упругий торсион 1. Недостатками известного устройства являются повыщенная потребная мощность адектродвигателей, увеличенная нагрузка на элементах кинематических цепей и сложность конструкции, что снижает точность позиционирования. Цель изобретения - повьипение точности позиционирования. Цель достигается тем, что механическая рука, содержащая подвижные плечевое, локтевое и кистевое звенья, выполненные в виде цилиндрических полых щарнирно сочлененных корпусов, внутри которых размещены приводные концентрически размещенные трубчатые ва:1ы, и кинема1ически.ми цепями управления связанных между собой в щарнпрах трехзвенных дифференциальных механиз.мов, и расположенные на основании электродвигатели каждой степени подвижности руки, а также упругий торсион, снабжена усилителе.м .мощности, подключенным своим выходом к каждому электродвигателю, а входом - к источнику напряжения смещения, и спиральной пружиной, кинематически связывающей корпус кистевого звена с кистевым шарниром, при этом в кинематическую цепь локтево1-о щарпира включен предварительно закрученный упругий торсион, а кинематические цепи управления остальными звенья.ми связаны с источником напряжения смещения. На чертеже приведена кинематическая схема предлагаемого устройства. Механическая рука содержит щарнирнорычажный исполнительный орган с двуосны.ми щарнирами на семь степеней подвижности, состоящий из подвижного основания 1, плечевого звена 2, звена 3 предплечья и кистевого звена 4, семи приводов движений (привод схвата на чертеже не показан), состоящих каждый из согласующих редукторов 5, электродвигателей 6 и усилителей 7 мощности, а также дополнительный дифференциальный механизм 8 с упругим торсионом 9, спиральную пружину 10, один конец которой жестко заделан в корпусе кистевого щарнира, а другой - в корпусе кистевого звена, имеющего врап;ение относительно собственной продольной оси и источника смещения 11, вырабатывающего заданные напряжения смещения, подаваемые на входы усилителей 7 мощности. Подвижные звенья 2-4 руки выполнены в виде полых цилиндров с тройниками 12 на концах и зубчатыми венцами 13. Если нижний и верхний тройники жестко сочленены с цилиндрическим корпусом подвижного звена, то это звено имеет только одну степень подвижности, если же нижний тройник образует с цилиндрическим корпусом звена вращательную пару, то такое звено имеет две степени подвижности: изгиб относительно оси щарнира и вращение относительно собственной продольной оси. Тройники двух соседних звеньев 2. 3 и 3, 4 сочленены друг с другом силовыми пустотелыми водила.ми 14, расположенными по торца.м тройников 12. Трубчатые отростки водил 14 образуют с тройниками 12 вращательные пары, осп которых являются верхней и нижней ося.1и двуосного щарнира. На цилиндрической части тройников 12 жестко закреплены зубчатые венцы 13 так, что сочленяемые звенья 2, 3 и 3, 4 образуют зубчатые 1П1Линдрические пары. В ци;1индрических корпусах подвижных звеньев 2-4 концентрически расположены трубчатые валы с жестко посаженными на концах ведущими и ведомыми зубчатыми колесами трехзвенных дифференциальных механизмов (ТДМ). Сателлитные колеса этих ТДМ распределены справа и слева от продольной оси звена и трубчатыми валиками, концентрически расположенными но осям щарниров, жестко сочленены с ведущими 15 и ведомыми 16 цилиндрическими зубчатыми колесами, помещенными в полые силовые водила 14. Ведущие 15 и ведомые 16 цилиндрические зубчатые колеса входят друг с другом в зацепления либо непосредственно, либо через промежуточную зубчатую пару 17, образуя в силовых водилах 14 цилиндрические зубчатые передачи, служащие для передачи движений в щарниры последующих звеньев. Таким образом два периферийных ТДМ, сателлитные колеса которых жестко связаны с трубчатыми отростками силовых водил 14, подводят движения к данному щарниру, а другие (центральные) транзитно передают движения через шарнир к носледующи.м подвпжны.м звеньям. Трубчатые валы, расположенные в подвижном основании 1, на концах имеют жестко посаженные входные зубчатые колеса, которые кинематически сочленены с выходными вала.ми соответствующих редукторов 5. Из схемы видно, что подвод движения к каждому щарниру осуществляется двумя периферийными ТДМ, кинематические цепи которых образуют параллельные ветви. Отсутствие вращения плечевого звена 2 делает одну параллельную ветвь в локтевом шарнире избыточной, которая используется для принудительной натяжки всех предыдущих звеньев руки. Эти две параллельные ветви на неподвижном основании замыкаются через дополнительный дпфференциальный механизм 8, водпло кото рого кинематически сочленено с выходным валом пятого согласующего редуктора 5. Устройство работает следующим образом. При вращении периферийных трубчатых валов, подводящих движение к данному щарниру, в разных направлениях и с одной и той же частотой вращения осуществляется поворот силовых водил 14 относительно верхней оси щарнира, который в свою очередь вызывает поворот примыкающего к щарниру звена относительно нижней оси щарнира. Таким образом, суммарный угол поворота последующего звена относительно предыдущего определяется из выражения )/UiJ abicC где Bi - угол поворота силовых водил i-ro шарнира относительно верхней оси; IX- -передаточное число зубчатой пары, образованной зубчатыми венцами 13 i-ro щарнира; i4i -суммарный угол иоворота примыкающего к щарниру i + 1-го подвижного звена относительно верхней оси шарнира. Из (1) следует, что при Uj 1 суммарный угол поворота конечного звена равен двойному углу поворота силовых водил, т. e.ajfi 2(XBj. Если направления вращений упомянутых трубчатых валов одинаковы, то силовые водила 14 будут стремиться развернуться в противоиоложных направлениях. Такое движение водил невозможно и поэтому образуется вращающий момент, обеспечивающий вращение предыдущего звена относительно собственной продольной оси. В шарнирах реализуется принцип суммирования мощности двух приводов, идущей или на изгиб последующего звена относительно осей щарнира, или на вращение предшествующего звена относительно собственной продольной оси. Входные трубчатые валы, подводящие движение к локтевому шарниру при работе привода 5-го движения, всегда имеют разнополярные вращения. Такое движение им обеспечивает дополнительный дифференциальный механизм 8. При повороте силовых водил 14, например, плечевого щарнира и остановленных приводах всех остальных движении, центральные трубчатые вал|)| в подвижпом осСледовательноновании 1 за1 орможены. з бзаторможены ведуигие цилиндрические чатые Ko.)ieca 15 тра11зитных кииематических ценен. FIpii этом ведомые зубчат,1е колеса 16 соверн1ают обкатку отиосипе.чьио ведупхих колес 15. Поворот ведомых зубчатых колес 16 сипфазеп повороту плечевого звепа ирп условпп Ut Utti ,(2) где Ц - нередаточпое число зубчатой иары, образоваппой зубчатыми вепцамп 13 плечевого П1арнп)а; -передатомпые чпсла цилиндрических зубчатых иередач, расположенных в водилах плечевого шарнира. Так осуп1ествляе1ся кинематическая развязка транзитных движений относительно движения изгиба звеньев. 11р вращении нодвижного основания I вран аются плечевой и локтевой П1арниры. При это.м пери(рерпйпые трубчатые ва.пы плечевого звена 2 долж1гы быть неподвижны относительно цплиндрпческо|-о корпуса этого звена 2, что равносильно их синхронному врапхению вместе с корпусом плечево1о звепа 2. Это вращение выз1)1вает аналогичное вращение трубчатых валов неподвижного основания, которые подводят движение к локтевому И1арниру. Причем враи1еппе этих валов совпадает. При таком вращении входные зубчатые колеса дополнительного дифференциального механизма 8 враи1аются в разных наиравлеииях, вызывая Bjiaп ение сателлитных колес этого механизма относительно собственных осей нри остановленном водиле. Если входные зубчатые колеса кинематических ветвей локтевого niapnnpa связаны с индивидуальны.ми ириводами, то согласованным вращением этих приводов образуется вращающий момент относительно продольной оси |1лечево1о звена 2. Плечевое звено 2 вокруг собственной продольной оси вращаться не может, поэтому образованный вращающий момент вызывает вращение подвижного основания 1. Поэтому предварительная закрутка торсиона 9 вызывает поворот подвижного основания 1 в направлении действия упругого момента торсиона 9. Если при этом на входы усилителей 7 мощности приводов илечевого шарнира подать си1нал смещения от источника 11, то эти приводы создают начальный момент MQ, направление которого можно выбрать противоположным направлению упругого момента торсиона 9. Тогда обе пары параллельных ветвей, обеспечивающие три стеиени под1:ижности (вращение основания 1, изгиб плечевого звена 2 и звена 3 предплечья), натянуты противоположно наиравленными моментами и зазоры в сочленениях элементов этих ветвей ликвиди
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипулятор | 1982 |
|
SU1013260A1 |
| Манипуляционное устройство | 1983 |
|
SU1122500A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Манипуляционное устройство | 1981 |
|
SU988544A1 |
| Шарнир манипулятора | 1984 |
|
SU1189678A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
МЕХАНИЧЕСКАЯ РУКА, содержащая подвижные плечевое, локтевое и кистевое звенья, вынолненные в виде цилиндрических нолы.х шарнирно сочлененных корпусов, внутри которых размещены приводные концентрически размещенные трубчатые валы, и кинематическими цепями управления связанных между собой в шарнирах трехзвенных дифференциальных механизмов, и расположенные на основании электродвигатели каждой степени подвижности руки, а также уиругий тореной, отличающаяся тем, что, с целью новыщения точности позициопировапия, она снабжена усилите.юм мощности, иодключенньгм своим вьгчодом к каждому электродвигателю, а входом - к источнику напряжения смещения, и спиральной пружиной, кинематически свизываюи1ей корпус кистево1о звепа с кистевым шарниром, при этом в кинематическую цепь локтевого щарнира включен нредварнтельно закрученный уиругий торсион, а кинематические цени управления остальными звеньями связаны с источником иапряжения смен1.ення.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРИВОДНОЕ УСТРОЙСТВОВСССО1-ОЗНАЯ | 0 |
|
SU303463A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
