o-i
Т - I - Я 4
/у Щ ffl...ffl | у
СЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидромеханической передачей | 1989 |
|
SU1710381A1 |
| Устройство для дистанционного управления гидромеханической трансмиссией транспортного средства | 1986 |
|
SU1397320A1 |
| УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ СТУПЕНЕЙ В ТРАНСМИССИИ | 1997 |
|
RU2131547C1 |
| Гидравлическая система управления трансмиссией транспортного средства | 1982 |
|
SU1049278A1 |
| Механизм плавного включения ступеней гидромеханической трансмиссии транспортного средства | 1986 |
|
SU1440764A1 |
| Механизм плавного включения передач гидромеханической трансмиссии транспортного средства | 1988 |
|
SU1581614A1 |
| Гидравлическая система управления ступенчатой трансмиссией транспортного средства | 1977 |
|
SU737258A1 |
| Гидромеханическая трансмиссия транспортного средства | 1976 |
|
SU653148A1 |
| Система автоматического управления трансмиссией транспортного средства | 1966 |
|
SU887286A1 |
| Механизм плавного включения фрикционной муфты трансмиссии транспортного средства | 1983 |
|
SU1076330A1 |
Изобретение относится к транспорту и может быть использовано для управления механическими и гидромеханическими трансмиссиями, в которых переключения передач осуществляются посредством многодисковых фрикционов с нажимными гидроцилиндрами. Цель изобретения - повышение эффективности путем снижения защиты мощности, расходуемой на управление трансмиссии после достижения в гидроцилиндрах фрикционов давления, соответствующего давлению источника жидкости. Устройство для реализации предлагаемого способа управления трансмиссией 1 содержит гидростанцию 5 с регулятором 7 давления, настройка которого изменяется посредством электромагнита, подключенного к вычислительному устройству 24. Последнее управляет также исполнительными электромагнитными клапанами 12-14 блока 11 и нормально закрытым клапаном 15. Выходы клапанов 12-14 подключены к гидроцилиндрам 2-4 и к датчикам 19-21 давления. При включении какой-либо передачи включают клапан 15 и один из клапанов 12-14. После достижения давления в соответствующем ей гидроцилиндре до величины, равной давлению источника, поддерживаемому регулятором 7, отключают клапан 15 и регулятор 7. При этом давление гидростанции уменьшается, гидроцилиндр изолируется от гидросистемы, и давление в нем начинает медленно падать. При его уменьшении, контролируемом периодически посредством датчиков 19,21, до минимально допустимой величины, вновь кратковременно включают клапан 15 и регулятор 7 и повышают давление в гидроцилиндре. Эту операцию периодически повторяют в течение всего времени работы передачи. В результате гидростанция п
5G 05D 
23 25
СП
4ь 4 O5 О СП
Фиг
la п) IK none HHOI о к иычисл итслы1им ci- РОИСГВХ 24 Последнее чправляет также
ПИЮ illll H.lbHhlMH ЭДе К I |)OM d ГН ИТН Ы M И клапанами 12 14 блока 11 и нормально закрытым клапаном 15 Выходы клапанов 12 14 по гкдючены к гидроцилиндрам 2-4 п к ипиикам 19 21 давления При включении кои nine передачи включают клапан 15 и тин из клапанов 12 14 Пос- ie шиижения давления в соответствующем ей MI фоци пгндре величины, равной давле iiino не ючнпка, поддерживаемому регчлято- |)ом 7, о| к помают клапан 15 и рег.тя юр 7 При этом давление гидростанции Muii iiiaiuH 11ироцилинд|) июдир екя от
Пян фечепие отнсхшся к транспорт} и может быть ииюлыовано для управления . нои/1. i пи.ча i ими механическими и гидро i анич( с кими трансмиссиями, в которых .к ри поченин перед,in осуществляются по i. ч к том MI 01 о паковых фрикционов с на- /Л1МНЫМИ in гроцилин грами
1U 1ь и (обретенияповышение эффек
гивноии снижения ытрат мощности, расхо на управление трансмиссии нос к гоегнжения в гидроцилиндрах фрикционной) гавления
Нафш 1 представ тепа электрот идравли ткан схема устройства, реализующею пгн иагаемыи способ управления многое иенчагои трансмиссией, на фш 24 i pa фики, и i not i )|цие процесс ишенения ыв гения, на фиг 5 блок схема а пори г va чфаз кния i ране миссис и
Мши ос i iicnuaгая трансмиссия 1 (фиг 1| имеет MHOI о паковые фрикционы ия вклю к пня icpi 1ач (не показаны), прав гнемыо iioi рс дс i вом нажимных идроцилиндров 2
1 Число шкледних равное чис ц фрикци- онов, зависит or числа передач и конструкции грансмисии 1 В планетарных гране м IK с и я бо гышпа г во г и ipomi пгп ФОБ не под вижгю, а часть (как правило не более дв х), с ooiiUMi гв югцая прямой передаче, нра шаюпчсчя В вагьных обычно вращаются ви i и ipoiui гиндры Трансмиссия 1 имеет
шп ьтри передачи переднего хо га нк иочае мь.1 пос рентном i и фоци шпдров 2 4, приiei mi ic u ии in IMIX вращающий я
рансмиссия I содержит также i идро- сганцпю 5, ишбражентю в виге источни ка п г. вкния 11 и iponac оса ), рсч лятора i ывно о мграв гения с переменной настройкой i pt i гягора 8 аавления сма1ки На- сос I) по iai i жн1косп и гидробака в на Г(р,) i и г.ри пгник) Ч I гинию i гавного гаи
к иии) 1ан и пне Ргл i нос ie пк и р.тся |К1 лятором 7 которыи направляет ин ) ж п гкос 11) в шнню 10 сма;ки ,l ii 4iiiH .мл (ки Рсн начи те 1ьно меньшее
0
i идросистемы, и давление в нем начинает медленно падать При его уменьшении контролир емом периодически посредством датчиков 19, 21, до минимально допустимой величины, вновь кратковременно включают клапан 15 и регулятор 7 и повышают давление в гидроцилиндре. Эту операцию периодически повторяют в течение всего времени работы передачи В результате гидростанция практически все время работает при низком давлении, что повышает ее долговечность и снижает гидравлические потери, т е расход топлива 2 з п ф-лы, 5 ил
0
0
5
с
0
5
0
РГП, ограничивается рег лятором 8, который сливает избыточною жидкость во всасываю- магистраль насоса 6 либо в гидробак (обычно через теплообменники, не показаны)
Блок 1 1 исполнительных клапанов содержит четырехлинейные дв хпозиционные электромагнитные клапаны 12-14 Первые нгнии их сообщены с гидробаком, вторая линия клапана 12 - с выходом клапана 15, вторые линии клапанов 13 и 14 с третьими линиями клапанов 12 и 13 соответственно Третья линия клапана 14 не ис- пользчегся Четвертые линии клапанов 12 - 14 гидролиниями 16-18 сообщены с гидроцилиндрами 2 -4 Параллельно последним по гключены электрические датчики 19-21 давтения Входная линия дв хлинейного дв ХП05ИЦИОННОГО клапана 15 подключена к ггавнои гидролинии 9
22 р чного правления подключен к бортовой электросети 23 и к микропроцессорному электрон но-вычиел ительномч строиств 24 известной конструкции Последнее имеет 25 входов от датчиков 19 21 давления, а также 26 входов от датчиков, используемых для работы микропроцессорных устройств Групэлектромаг- к
па 27 выходов подключена к
нитам клапанов 12-14, а выход 28 - - гектромагниту регхлятора 7
На выходах блока 11 - в гидролиниях 1Ь 18 - может также устанавливаться механизм 29 плавности (п нктир) В линии 16 к вращающему гидроцилиндру 4 быть повышенные чтечки по вращающимся уплотнениям, словно изображенные дренажной линией с дросселем 30
Устройство блока 11 показано применительно к прощенной трансмиссии 1 Для дрмих трансмиссий он может иметь другое число распределителей линий в них, а также ф i} ю их комм тацию Электромагнитный привод распределителей может быть как с силовыми электромагнитами, гак и с пи ютными клапанами и так далее
Способ управления трансмиссией заключается в следующем.
Вручную с помощью пульта 22 либо автоматически с помощью вычислительного устройства 24 выбирают нужную передачу трансмиссии 1, например, первую передачу, которой соответствует гидрицилиндр 2. Для его включения подают напряжение от бортовой сети 23 на электромагнитные клапаны 14 и 15, а также на электромагнит регулятора 7. Последний настраивается на номинальное давление PI.I н, необходимое для замыкания фрикционов. Жидкость под этим давлением поступает в линию 9 и через клапаны 15, 12 и 14 и линию 18 - в гидроцилиндр 2.
Давление Рг, в гидроцилиндре 2 изменяется следующим образом. До момента Т| оно мало ввиду движения поршня, выбирающего зазоры в пакете дисков фрикциона. С момента Т| оно повышается с определенным по закону, задаваемому механизмом 29 плавности, либо устройством 24. В момент Т- давление уравнивается с давлением P.I.I питания. В этот момент, фиксируемый по показаниям датчика 21, выключают клапан 15, гидроцилиндр 2 изолируется от линии 9 и источника 6.
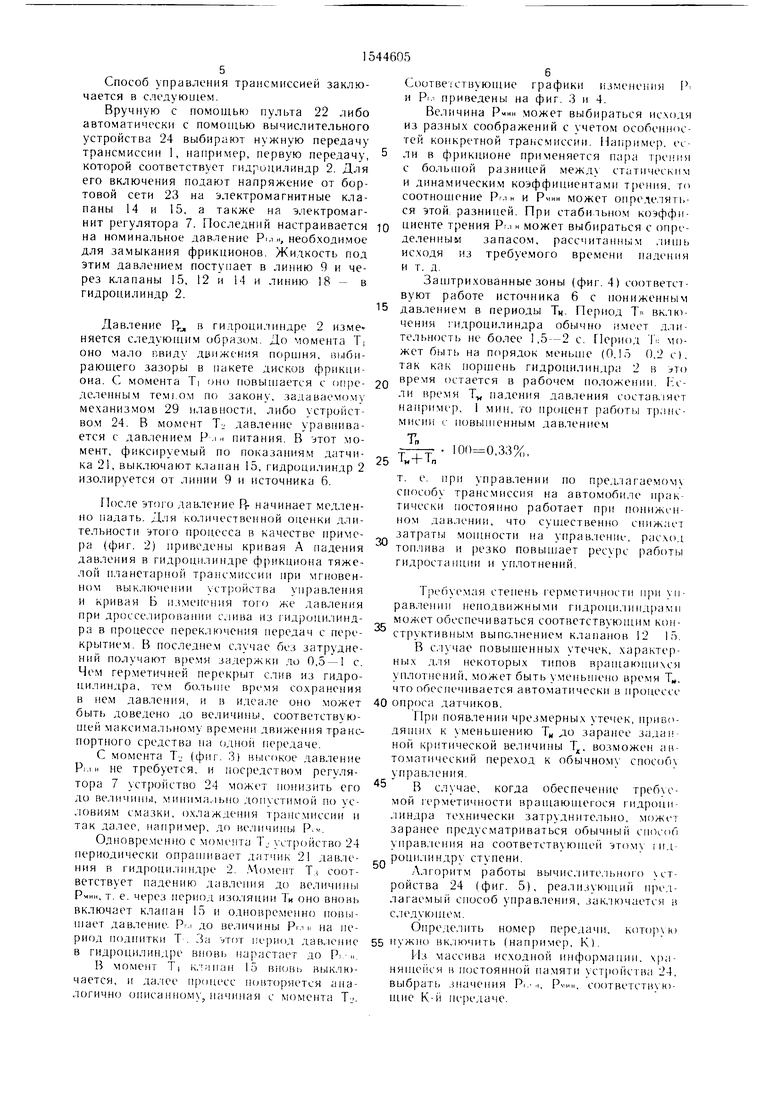
После этого давление Рг начинает медленно падать. Для количественной оценки длительности этого процесса в качестве примера (фиг. 2) приведены кривая А падения давления в гидроцилиндре фрикциона тяжелой планетарной трансмиссии при мгновенном выключении устройства управления и кривая Б изменения того же давления при дросселировании слива из гидроцилиндра в процессе переключения передач с перекрытием. В последнем случае без затруднений получают время задержки до 0,5 - 1 с. Чем герметичней перекрыт слив из гидроцилиндра, тем больше время сохранения в нем давления, и в идеале оно может быть доведено до величины, соответствующей максимальному времени движения транспортного средства на одной передаче.
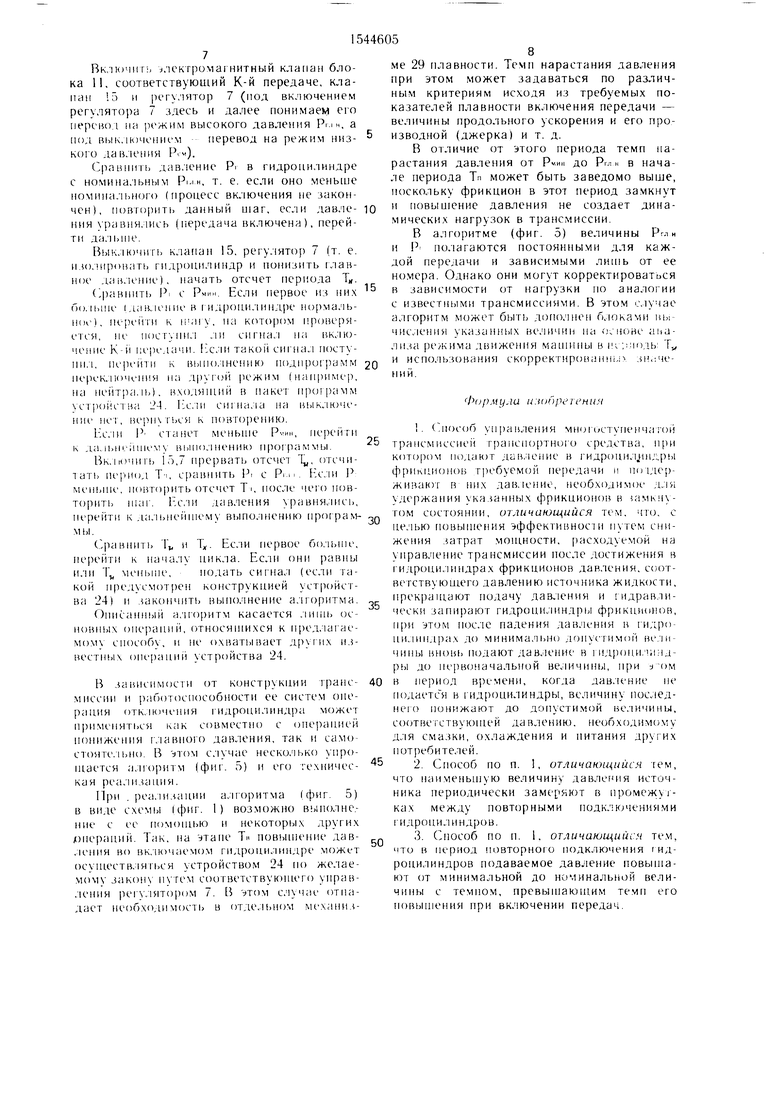
С момента Т- (фиг. 3) высокое давление Pi., н не требуется, и посредством регулятора 7 устройство 24 может понизить его до величины, минимально допустимой по условиям смазки, охлаждения трансмиссии и так далее, например, до величины Р..
Одновременно с момента Tjустройство 24 периодически опрашивает датчик 21 давления в гидроцилиндре 2. Момент Т) соответствует падению давления до величины Рмнн, т. е. через период изоляции Ти оно вновь включает клапан 15 и одновременно повышает давление- Р- до величины Рм , на период подпитки Т . За этот период давление в гидроцилиндре вновь нарастает до Р. ,
В момент Т| клапан 15 вновь выключается, и далее процесс повторяется аналогично описанному, начиная с момента TL.
Соотвектвующие графики изменения Р. и PI.I приведены на фиг. 3 и 4.
Величина Р«ин может выбираться исходя из разных соображений с учетом особенностей конкретной трансмиссии. Например, если в фрикционе применяется пара трения с большой разницей между статическим и динамическим коэффициентами трения, го соотношение Ргл в и Р««н может определяться этой разницей. При стабитьном коэффиимейте трения Ры н может выбираться с определенным запасом, рассчитанным лишь исходя из требуемого времени падения и т. д.
Заштрихованные зоны (фиг. 4) соответствуют работе источника 6 с пониженным
давлением в периоды Тц. Период Т в включения гидроцилиндра обычно имеет длительность не более 1,5 - 2 с. Период Т.; может быть на порядок меньше (0.15 0.2 с), так как поршень гндропилиндра 2 в зто
Q время остается в рабочем положении. Нс- ли время Tv падения давления составляет например, 1 мин, то процент работы тр.шс- мисин с повышенным давлением
-А- . ,33%, 5 и+ п
т. е. при управлении по предлагаемому способу трансмиссия на автомобиле практически постоянно работает при пониженном давлении, что существенно снижает затрать мощности на управление, расход
0
топлива и резко повышает ресурс работы гидростанции и уплотнений.
Требуемая степень герметичности при управлении неподвижными гидроцилипдрамн может обеспечиваться соответствующим конструктивным выполнением клапанов 12 15.
В случае повышенных утечек, характерных для некоторых типов вращающихся уплотнений, может быть уменьшено время Т„, что обеспечивается автоматически в процессе 0 опроса датчиков.
При появлении чрезмерных утечек, приводящих к уменьшению Ти до заранее задан ной критической величины Тх. возможен автоматический переход к обычному способу управления.
5 В случае, когда обеспечение требуемой герметичности вращающегося гидроцилиндра технически затруднительно, может заранее предусматриваться обычный способ управления на соответствующей этому i ид- роцилиндру ступени.
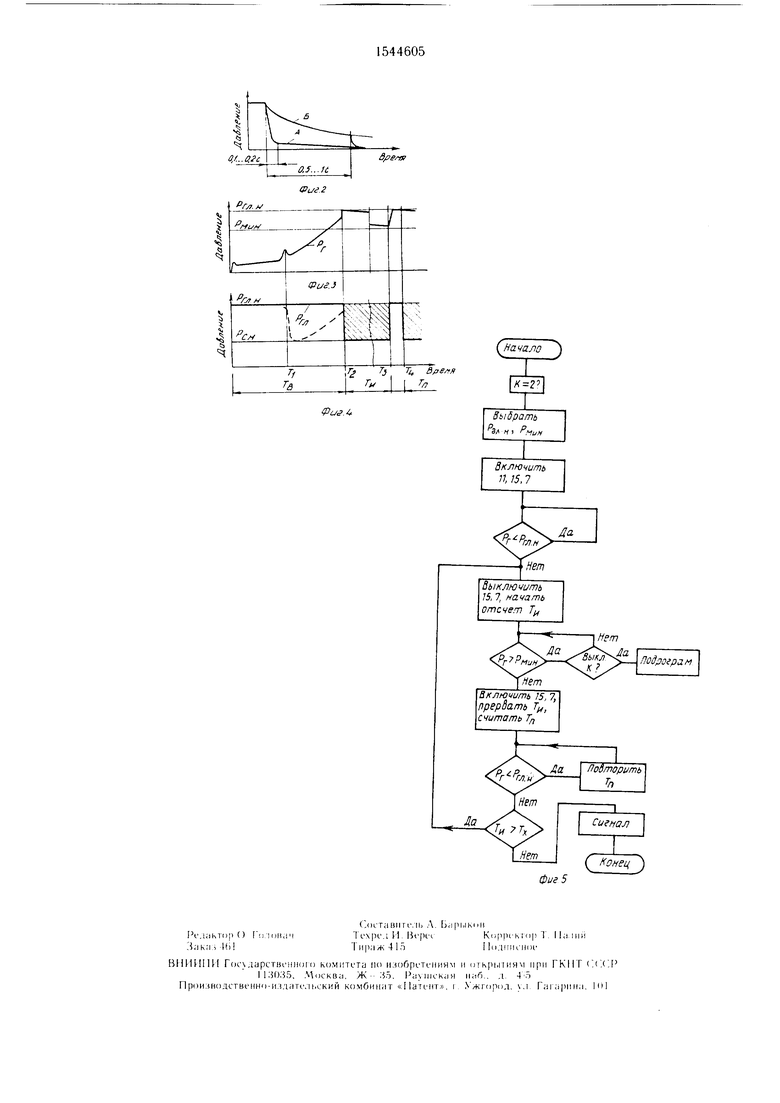
Алгоритм работы вычислительного устройства 24 (фиг. 5), реализующий предлагаемый способ управления, заключается в следующем.
Определить номер передачи, которую 5 нужно включить (например, К).
Из массива исходной информации, хранящейся в постоянной памяти устройства 24, выбрать значения Рг и. , соответствующие К-й передаче.
0
Bhih)4iir-j j.iCKipoviai нитный клапан блока 11, соответствующий К-й передаче, клапан 5 и регулятор 7 (под включением регулятора 7 здесь и далее понимаем ею перево i на ре/ним высокого давления Р. .и, а под выключением перевод на режим низ- давления Р. ч).
Сравниib давление Р, в гидронилиндре с номинальным Рын, т е если оно меньше номинального (процесс включения не закончен), повторить данный шаг, если давления уравнялись (передача включена), перейти дальше
Выключим, клапан 15. регулятор 7 (т е и ю. иров.иь гндропилиндр и поншить главное тавление), начать отсчет периода Т„
Сравнить Р с Рми« Если первое из них оо ibiiie I uBieiuie в гидроцилиндре нормаль- H(K), трети к h .iiN, на котором проверяется, HI. пост.пил ли ипнал на включение К и ьере мчи ,сли такой сиг нал посту - пи г, перейти к выио 1непию подпрограмм переключения H.I ipyron режим (нлпримс р, на центра п.). входящий в пике программ с г рогч г на J-4 Пеги сигнала на выключение нет, вернчгься к повторению
1л.in Р станет меньше PV«H, перси ги к и пин ,uiic v выполнению программы
Вкиочшь 1о,7 прервать отсчет 1, огсчи- тагь период Т , сравнить Р. с PI Не in P меньше, повторить отсчет Т i, после чею повторить nun Fc ги явления равнялись, перейти к ы.гьнеишему выполнению программы
(Сравнить 1„ и Т„ Если первое бо ibine, перейти к началу никла Если они равны или „ меньше, подать сигнал (если такой предусмотрен конструкцией уетроиег- ва 24) и закончить выполнение алгоритма
Описанный апоритм касается лишь ос ионных операции, относящихся к пред.гаг ас мому способу, и не охватывает ш- вестных опе)ании устройства 24
В зависимости от конструкции гране миссии и работоспособности ее систем операция огкгючения i идроцилиндра можег применяться K.IK совместно с операцией понижения г UIBHOIO давления, так и само стоите пню В случае несколько упрощается алгоритм (фиг 5) и его техническая реали ищи я
При реализации алгоритма (фиг 5) в виде схемы (фиг 1) возможно выполнение с ее помощью и некоторых других /операции Так, на лапе Т в повышение давления во вктючаемом гидроцилиндре может осуществляться устройством 24 по желаемому закон путем соответствующего управления рем у гятором 7 В этом случае отпадает необходимость в от тельном механи з
0
5
0
5
0
5
0
ме 29 плавности Темп нарастания давления при этом может задаваться по различным критериям исходя из требуемых показателей плавности включения передачи - величины продольного ускорения и его производной (джерка) и г д.
В отличие от этого периода темп нарастания давления от Р«ии до Ргп н в начале периода Тп может быть заведомо выше, поскольку фрикцион в этот период замкнут и повышение давления не создает динамических нагрузок в трансмиссии
В алгоритме (фит 5) величины Р-л н и Р полагаются постоянными для каждой передачи и зависимыми лишь от ее номера Однако они могут корректироваться в зависимости от нагрузки по аналогии с известными трансмиссиями В этом л гае алгоритм может быть дополнен блоками нь, числения укаданных величин па о,чоне аиа лиза режима движения машины в гч нпь Г„ и использования скорректировано, л зн. че
НИИ
Формула и енич
1( поеоб пра плен и я мног с«.т пепча . он трансмиссиеи г раниюрт ног о средства, при котором подают тение в г идронил.ин,1 ры фрикционоь требчемой гтередачи и по гдер живаюг в них давгеши, необходимое пи удержания указанных фрикционов в замкч - гом состоянии, (сличающийся тем. что, с целью повышения эффективности п г ем снижения затрат мощности, расходуемой ни управление трансмиссии после достижения в гидроцилиндрах фрикционов дарления, соог- BeicTBy ющет о давлению источника жидкое i и, прекращают подачу давления и гидравти- ческн запирают гидроцилиндры фрикционов, при этом после падения давления в гидро пи гиндрач до минимально дону гпмои ве ш чины вновь подают давление в г идроци м и ры до первоначальной величины, при ом в период времени, когда давление не подается в г идроци.жндры, величину последнею понижают до допустимой величины, соотве i ству юшей давлению, необходимому для смазки, охлаждения и питания других потребителей
2Способ по п 1, отличающийся тем, что наименьшую величину давления источника периодически замеряют в промеж 1- ках между повторными подключениями iидроцилиндров
3Способ по п 1, отличающийся тем. что в период повторного подключения гидроцилиндров подаваемое давление повышают от минимальной до номинальной величины с темпом, превышающим темп его повышения при включении передач
фиг 5
(Конец )
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| кл В П(( К -Л М, 2() 04 ,Ч( | |||
