Л
эо
СЛ
9
Изобретение относится к измерительной технике и может быть использовано для определения электромагнитного момента частотно-регулируе- мых асинхронных электроприводов с инверторными преобразователями частоты.
Цель изобретения - повышение точности.
На фиг.1 представлена структурная схема предлагаемого устройства; на фиг.2 - структурная схема блока по- лупериодного интегрирования; на фиг.З - структурная схема блока вы- деления модуля.
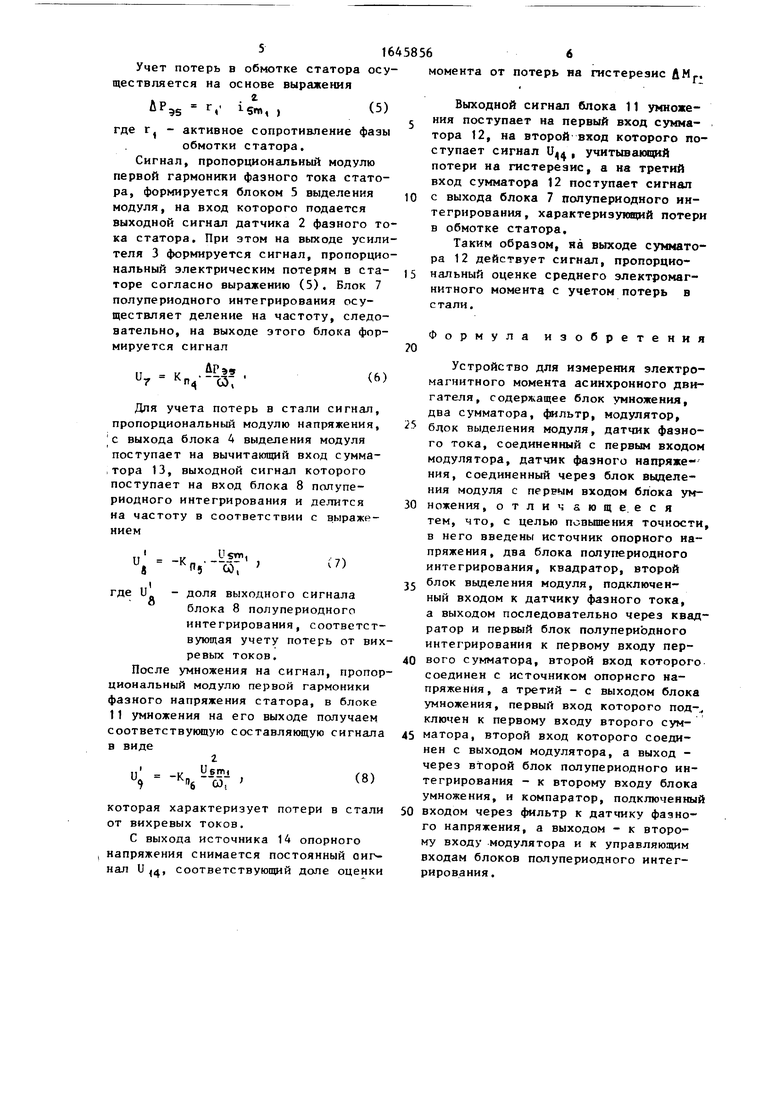
Устройство для измерения электромагнитного момента асинхронного двигателя, содержит датчик 1 фазного напряжения статора, датчик 2 фазного тока статора, усилитель 3, два блока 4 и 5 выделения модуля, модулятор 6, два блока 7 и 8 полупериодного интегрирования, фильтр 9, компаратор 10, блок 11 умножения, два суммато- ра 12 и 13, источник 14 опорного напряжения, квадратор 15. Блоки 7 и 8 полупериодного интегрирования (схема которых представлена на фиг. 2) предназначены для формирования ин- теграла из входного сигнала на каждом полупериоде ЭДС статора и хранения этого интервала в течение следующего полупериода. Каждый блок 7 и 8 полупериодного интегрирования содержит логический элемент НЕ 16 четыре ключа 17-20, два интегратора 21 и 22 и две схемы 23 и 24 выборки- хранения ,
Блок выделения модуля (фиг. 3) со держит выпрямитель 25, фильтр 26 и функциональный преобразователь 27.
Устройство рабртает следующим образом.
На информационный вход модулятора 6 поступает выходной сигнал датчика 2 фазного тока статора, который может быть представлен рядом
U2 кп, Ч
где k - номер гармоники;
Kn, 5L.isn,,sin(kW t +
(1)
амплитуда k-ой гармоники тока
статора;
частота 1-й гармоники гона; начальная фаза k-ои гчрмониьи
тока г гатора;
коэффициент пропорпионм (ь- ности.
На вход управления модулятора 6 через- фильтр 9 и компаратор Ю поступает выходной сигнал датчика 1 фазного напряжения статора. Благодаря компаратору 10 этот сигнал приобретает прямоугольную форму и точно совпадает по фазе с первой гармоникой фазного напряжения.
Выходной сигнал модулятора 6 повторяет форму сигнала тока при положительной полуволне фазного напряжения статора и соответствует инвертированному сигналу тока при отрицательной полуволне напряжения. Сигнал модулятора 6 характеризует проекцию изображающего вектора тока фазы на вектор напряжения соответствующей фачы.
Выделение постоянной составляющей сигнала модулято а 6 после суммирования в сумматоре 13 с выходным .сигналом блока 4 выделения модуля осуществляется блоком 8 полупериодного интегрирования, в котором одновременно производится деление на частоту в соответствии с выражением
U8
соответствии
Г
КПг pE-ism -sin(kCO,t
Krio
.
-W.. ,2,
t - I
На первый вход блока 11 умножения подается постоянный сигнал с выхода блока 4 выделения модуля, пропорциональный модулю первой гармоники фазного напряжения, а на второй вход блока 11 умножения подается сигнал с выхода блока 8 полупериодного интегрирования. Таким образом, на выходе блока 11 умножения присутствует сигнал
К
ПЭ
Usm 1
соГ
оо
1с
ispcusCfi.O)
45
50
55
Выражение 3 характеризует деленное на частоту первой гармоники мгновенное значение активной мощности асинхронного двигателя с учетом высших гармоник фазного тока статора. Для получения электромагнитного момента необходимо учесть элек- тричзские потери в обметке статора и магнитные потери в стали статора
к, .21 -L tf СО,
(.
в обмотке статора осуоснове выражения г
)
(5)
где г( - активное сопротивление фазы
обмотки статора. Сигнал, пропорциональный модулю первой гармоники фазного тока статора, формируется блоком 5 выделения модуля, на вход которого подается выходной сигнал датчика 2 фазного тока статора. При этом на выходе усилителя 3 формируется сигнал, пропорциональный электрическим потерям в статоре согласно выражению (5). Блок 7 полупериодного интегрирования осуществляет деление на частоту, следовательно, на выходе этого блока формируется сигнал
момента от потерь на гистерезис ДМ-.
Выходной сигнал блока 11 умноже- 5 ния поступает на первый вход сумма- тора 12, на второй вход которого поступает сигнал } , учитывающий потери на гистерезис, а на третий вход сумматора 12 поступает сигнал 10 с выхода блока 7 полупериодного интегрирования, характеризующий потери в обмотке статора.
Таким образом, на выходе сумматора 12 действует сигнал, пропорцио- 15 нальный оценке среднего электромагнитного момента с учетом потерь в стали.
0
Формула изобретения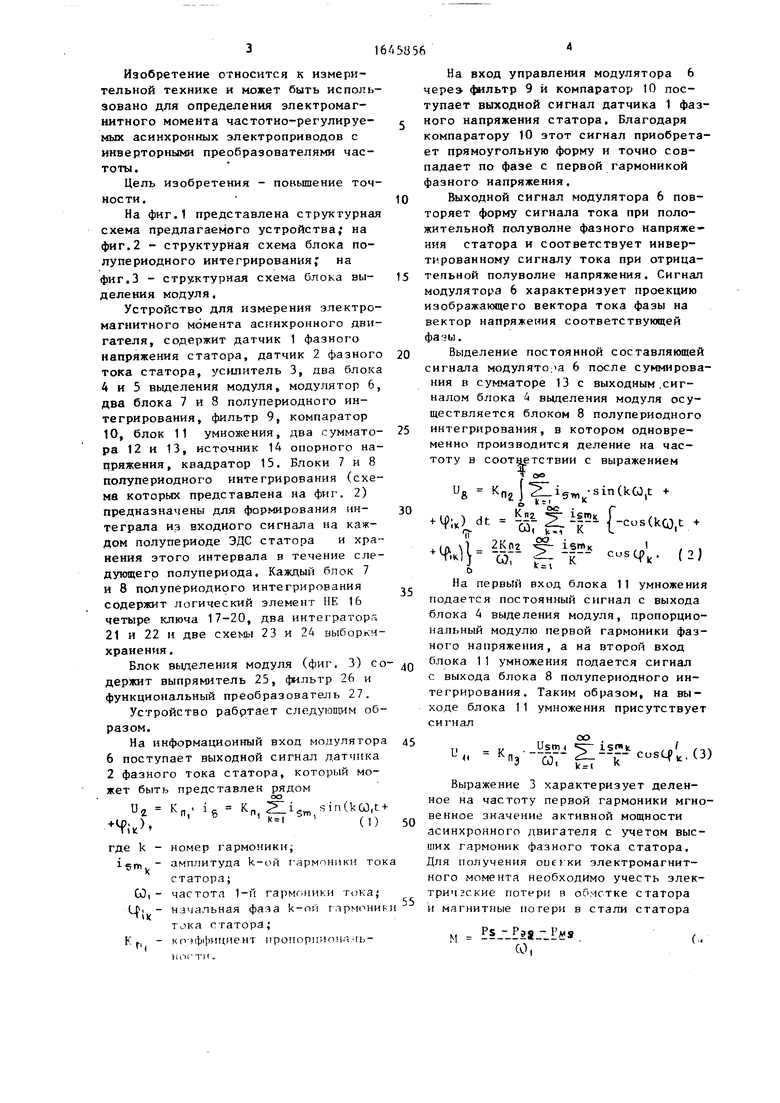
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения электромагнитного момента асинхронного двигателя | 1989 |
|
SU1631322A1 |
| Устройство для определения момента асинхронного двигателя в регулируемом электроприводе | 1987 |
|
SU1520362A1 |
| Устройство для измерения электромагнитного момента асинхронного электродвигателя | 1987 |
|
SU1545107A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU817880A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2039955C1 |
| Устройство для определения скольжения асинхронного двигателя | 1986 |
|
SU1415399A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Устройство для управления асинхронной машиной с фазным ротором | 1983 |
|
SU1137561A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
Изобретение опосится к измерительной технике и может быть использовано для определения электромагнитного момента частотно-регулируемы асинхронных электроприводов с инвергорными преобразователями частоты. Целью изобретения является повышение точности. Сигнал с датчика 1 фазного напряжения через блок 4 выде ieкия модуля поступает на один пход блока 11 умножения, на другой тх-г-; которого поступает сигнал с датчика 2 фазного тока, прошедший через непочку из модулятора 6, сумматора 13 и блока 8 полупернодного интегрирования. Сигнал с блока 11 умножения поступает на один вход сумматора 12, нг. другой вход которого поступает сигнал с источника 14 опорного напряжения, а на третий - с датчика 2 фазного тока, последовательную цепь из блока 5 выделения модуля, квадратора 15, усилителя 3 и блока 7 полупериодного интегрирования. с датчика 1 фазного напряжения, пройдя через фильтр 9 и компаратор 10, управляет работой модулятора 6 к блокоа 7,8 пслупе- риодного интегрирования. Сигнал с выхода сумматора 12 пропорционален электромагнитному моменту двигателя. 3 ил. // гг
«Г--Ч
Для учета потерь в стали сигнал, пропорциональный модулю напряжения,
с выхода блока А выделения модуля поступает на вычитающий вход сумма,тора 13, выходной сигнал которого поступает на вход блока 8 полупериодного интегрирования и делится на частоту в соответствии с выражением
и1 - -к , U8 % СО,
(7)
где U - доля выходного сигнала блока 8 полупериодного интегрирования, соответствующая учету потерь от вихревых токов.
После умножения на сигнал, пропорциональный модулю первой гармоники фазного напряжения статора, в блоке 11 умножения на его выходе получаем соответствующую составляющую сигнала
в виде
2
u; (ю
которая характеризует потери в стали от вихревых токов.
С выхода источника 14 опорного напряжения снимается постоянный сигнал U соответствующий доле оценки
Устройство для измерения электромагнитного момента асинхронного двигателя, содержащее блок умножения, два сумматора, фильтр, модулятор,
25 блок выделения модуля, датчик фазного тока, соединенный с первым входом модулятора, датчик фазного напряжения, соединенный через блок выделения модуля с первым входом блока ум30 ножения, отлич а ю щ е. е с я
тем, что, с целью повышения точности, в него введены источник опорного напряжения, два блока полупериодного интегрирования, квадратор, второй
35 блок выделения модуля, подключенный входом к датчику фазного тока, а выходом последовательно через квадратор и первый блок полупериодного интегрирования к первому входу пер40 вого сумматора, второй вход которого- соединен с источником опорного напряжения, а третий - с выходом блока умножения, первый вход которого под-, ключей к первому входу второго сум45 матора, второй вход которого соединен с выходом модулятора, а выход - через второй блок полупериодного интегрирования - к второму входу блока умножения, и компаратор, подключенный
50 входом через фильтр к датчику фазного напряжения, а выходом - к второму входу модулятора и к управляющим входам блоков полупериодного интегрирования.
Фиг. 2
foa.3
| Способ измерения электромагнитного момента многофазного электродвигателя переменного тока | 1977 |
|
SU691703A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения электромагнитного момента асинхронного электродвигателя | 1987 |
|
SU1545107A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
