Изобретение относится к устройствам для манипулирования изделиями и может быть использовано в любой области техники (металлообработке, легкой промышленности, почтовой связи), где необходимо ориентировать груз относительно исполнительных механизмов или схватов манипулятора и укладывать в заданном положении, в частности на предприятиях почтовой связи для лицовки и сортировки посылок.
Целью изобретения является повышение производительности и надежности работы.
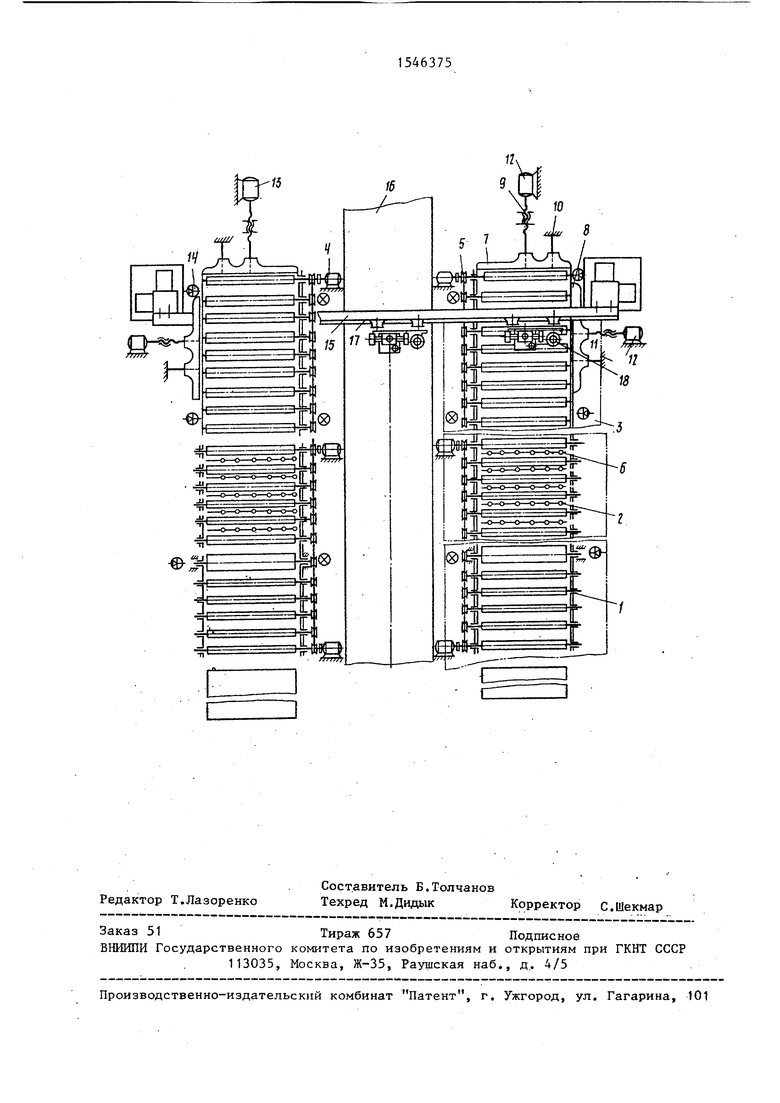
На чертеже изображено предлагаемое устройство, план.
Устройство содержит установленные за питателем два трехсекционных роликовых приемно-передающих конвейера с секциями 1-3, каждая из которых имеет свой привод в виде двигателя с редуктором 4 и цепную передачу 5. Секция 1 может быть снабжена пульсирующим приспособлением для поштучной выдачи груза по мере съема предыдущего груза с позиции захвата (не показано) , а секции 2 - набором линеек датчиков 6 для считывания положения ярлыка (метки) на одной из граней груза и определения габаритов груза в горизонтальной плоскости. Секция 3 имеет позицию захвата грузов и снабжена двумя взаимно перпендикулярными ограничительными приводными упорами 7 и 8 с гайками 9, направляющими 10 t и 11, шаговыми двигателями 12 и 13,
СЛ
4Ь С& СО
СИ
датчиками 14 наличия груза. Устройство содержит портал 15, расположенный на посту сортировки над позициями захвата грузов перпендикулярно продольной оси сортировочного конвейера 16 сортировочной машины и оси трехсекци- онных конвейеров. На портале 15 уста- ровлены манипуляторы 17 и 18, поочередно располагающиеся над позициями захвата одного из трехсекционных кон- рейеров и сортировочным конвейером 16. Манипуляторы снабжены схватами, Имеющими возможность поворота через 90д в горизонтальной и вертикальной плоскости для манипулирования друзами с целью их ориентации (не показаны) . Устройство снабжено автоматической системой управления для анализа показаний датчиков габаритов груза, датчиков, фиксирующих расположение ярлыка (метки) и выдачи соответствующих команд системы управления, манипуляторов 17 и 18 и шаговых двигателей 12 и 13 (системы управления не показаны).
Приемо-передающие конвейеры расположены симметрично относительно конвейера 16.
Устройство работает следующим образом.
Груз из накопителя (не показан) поступает на секцию 1 одного из трехсекционных конвейеров и поштучно (по Mgpe съема предыдущего груза с позиции захвата) поступает на секцию 2 для считывания положения адреса (метки) на грузе и габаритозз груза. Информация известным образом запоминается, анализируется, программируется. В системы управления манипуляторов передаются запрограммированные команды по перемещению манипуляторов схва- том, а также команды на вращение шаговых двигателей 12 и 13 для центрирования груза на позиции захвата. С секции 2 груз перемещается на секцию 3, замыкает датчик 14, при этом приводятся в действие шаговые двигатели 12 и 13, которые винтами 9 приводят в поступательное движение упоры 7 и 8 относительно направляющих 10 и 11. Груз центрируется в горизонтальной плоскости по координатам X и Y относительно схвата манипулятора 17 (или 18), который ожидает груз над позицией захвата. Рука манипулятора
опускается, захватывает груз (устройство известное), по заданной самим грузом (расположением ярлыка) программе схват кантует груз так, чтобы ярлык оказался в заданном месте.
Во время опускания манипулятора 17 одновременно опускается рука манипулятора 18, опускает на конрейер 16 сортировочной машины снятый ранее с правого трехсекционного кон5 вейера груз. Руки манипуляторов Т7
/
и 18 одновременно поднимаются и манипуляторы движутся согласованно вправо так, что манипулятор 17 (с грузом) останавливается над конвейером
0 16 сортировочной машины, а манипулятор 18 над позицией захвата правого трехсекционного конвейера с-расположенными на ней грузом.
Кантование груза для установки
5 его в определенном положении на конвейере сортировочной машины производится после подъема его за время движения манипулятора к конвейеру сортировочной машины. В дальнейшем
Q цикл повторяется справа налево, установленный на сортировочный конвейер груз автоматически адресуется в соответствующий адресу накопитель.
Формула изобретения
Устройство сортировки и лицовки грузов, включающее питатель, пост лицовки и сортировочный конвейер, о т- личающееся тем, что, с целью повышения производительности и повышения надежности работы, оно снабжено расположенными за питателем симметрично относительно сортировочного конвейера приемно-передающими конвейерами с позициями захвата грузов, установленными взаимно перпендикулярно на данных позициях ограничительными приводными упорами и расположенным перпендикулярно конвейерам на посту лицовки над позициями захвата грузов порталом с подвижно установленными на нем двумя несвязанными между собой манипуляторами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС СОРТИРОВКИ И НАКАПЛИВАНИЯ ПОСЫЛОК | 2013 |
|
RU2566316C2 |
| Машина для набора комплектов печатной корреспонденции | 1990 |
|
SU1747201A1 |
| СПОСОБ СОРТИРОВКИ ТВЕРДЫХ ОТХОДОВ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2283193C1 |
| СПОСОБ СОРТИРОВКИ ПОЧТОВЫХ ОТПРАВЛЕНИЙ ПРИ ПОМОЩИ ЧЕЛНОЧНЫХ ЛОТКОВ С ПЕРЕМЕННОЙ ЕМКОСТЬЮ ЗАГРУЗКИ | 2011 |
|
RU2504442C1 |
| СПОСОБ СОРТИРОВКИ ТВЕРДЫХ ОТХОДОВ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2282506C1 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ УЧАСТОК ПЕРЕСЧЕТА ДЕНЕЖНОЙ НАЛИЧНОСТИ | 2018 |
|
RU2697316C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ СОРТИРОВКИ | 1967 |
|
SU191752A1 |
| ТЕРМИНАЛ ДЛЯ ПОТОЧНОЙ ОБРАБОТКИ КОНТЕЙНЕРОВ НА ОСНОВЕ СОРТИРОВОЧНОЙ ГОРКИ КУЗОВКОВА | 2008 |
|
RU2388680C2 |
| Способ раскряжевки лесоматериалов и раскряжевочная установка | 1987 |
|
SU1530444A1 |
| Автомат для контроля и сортировки цилиндрических деталей | 1987 |
|
SU1443978A1 |
Изобретение относится к манипулированию изделиями и позволяет повысить производительность и надежность работы. Устройство содержит питатель, пост лицовки и сортировочный конвейер /К/. За питателем симметрично К расположены приемно-передающие К с позициями захвата грузов с установленными на них взаимно-перпендикулярно ограничительными приводными упорами /ПУ/. На посту лицовки над позициями захвата грузов перпендикулярно К установлен портал с подвижно установленными на нем и несвязанными между собой манипуляторами /М/. Груз из накопителя подается на приемно-передающий К и перемещается им до позиции захвата, где выравнивается упорами и захватывается М. Груз кантуется М и передается на К. 1 ил.
| Почтовая связь | |||
| Справочник | |||
| М.: Связь, 1978, с.29 | |||
| Там же, с.225. |
