(21)4362066/08
(22)04.12.87
(46) 30.04.91. Бюл. № 16
(71)Научно-производственное объединение по технологии машиностроения для животноводства и кормопроизводства Ростниитм
(72)Ю.В.Гявгянен, Н.М.Забалуев и Л.В.Попов
(53) 621,229.72(088.8)
(56)Авторское свидетельство СССР № 818819, кл. В 23 Q 7/04, 1981.
(54) МАНИПУЛЯТОР
(57)Изобретение относится к машиностроению, а именно к робототехнике. Целью изобретения является повышение надежности в работе манипулятора и упрощение его конструкций. Устройство содержит корпус 1 со съемной крышкой 9 и размещенный в нем ротор 2, на котором с помощью стойки 14 закреплена
механическая рука 3 с исполнительным органом 15. Привод 4 вращательного и возвратно-поступательного движения ротора 2 выполнен в виде противоположно направленных тангенциальных каналов 18, расположенных под наклоном к дну 8 корпуса 1. Устройство ограничения движения 5 состоит из дна 8, съемной крышки 9 и упоров 16. Для четкой фиксации траектории механической руки 3 она может быть размещена в пазах, которые выполняются в съемной крыпг- ке 9. Работа манипулятора осуществляется за счет попеременной подачи сжатого воздуха то в один, то в другой из тангенциальных каналов 18. При этом механическая рука 3 поднимается, затем поворачивается в одну сторону и опускается. Далее механическая рука 3 опять поднимается, поворачивается в другую сторону и опускается, завершив цикл. 2 з.п.ф-лы, 18 ил.
А
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1538397A1 |
| УНИВЕРСАЛЬНЫЙ ВРАЩАТЕЛЬНО-ТОЛКАТЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2008 |
|
RU2418959C2 |
| Манипулятор для зачистки отливок | 1988 |
|
SU1546207A1 |
| Установка для прессования изделий из порошка | 1987 |
|
SU1447572A1 |
| Манипулятор | 1981 |
|
SU960006A1 |
| ВРАЩАТЕЛЬНО-ТОЛКАТЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2470168C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1988 |
|
RU2076217C1 |
| РЕГУЛИРУЮЩИЙ КЛАПАН | 2008 |
|
RU2366846C1 |
| ТАТУИРОВОЧНАЯ МАШИНА И САМОУСТАНАВЛИВАЮЩАЯСЯ ОПОРА ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ ТАТУИРОВОЧНОЙ МАШИНЫ | 2017 |
|
RU2644698C1 |
| Манипулятор | 1985 |
|
SU1663034A1 |

1В
Фт.1
Изобретение относится к машиностро- рОению и может быть использовано в гибких производственных системах.
Целью изобретения является упрощение конструкции и повышение надежности манипулятора в работе.
На фиг.1 изображен манипулятор, осевой разрез; на фиг.2 - вид по С |грелке А на фиг. 1 ; на фиг.З - вари- айт выполнения соплового аппарата в виде резьбовых втулок; на фиг.4 -вариант выполнения соплового аппарата в виде кольцевых сопл; на Лиг.5 - вариант выполнения кольцевого сопла с направляющими лопатками и подводяр(ей спиральной камерой; на фиг.6 - вариант выполнения манипулятора со съемной крышкой корпуса и направляющими пазами; на фиг.7 - разрез Б-Б на .6; на фиг.8 - развертка пазов в крышке корпуса; на фиг.9, 10 - вари- айты выполнения манипулятора с устройством для торможения и ускорения движения; на фиг.11 - вариант выполнения манипулятора с подшипниковыми узлами; нб фиг.12- вариант выполнения крышки корпуса из двух частей; на фиг.13 - развертка пазов на фиг.12; на фиг.14- с}сема сил, действующих на тело враще- в горизонтальной плоскости; на . .15 - схема сил, действующих на вращения в вертикальной плоскости; на фиг.16 - вариант установки пружины на подшипнике; на фиг.17 - вариант установки ролика на механической руке; на фиг.18 - вариант размещения соплового аппарата.
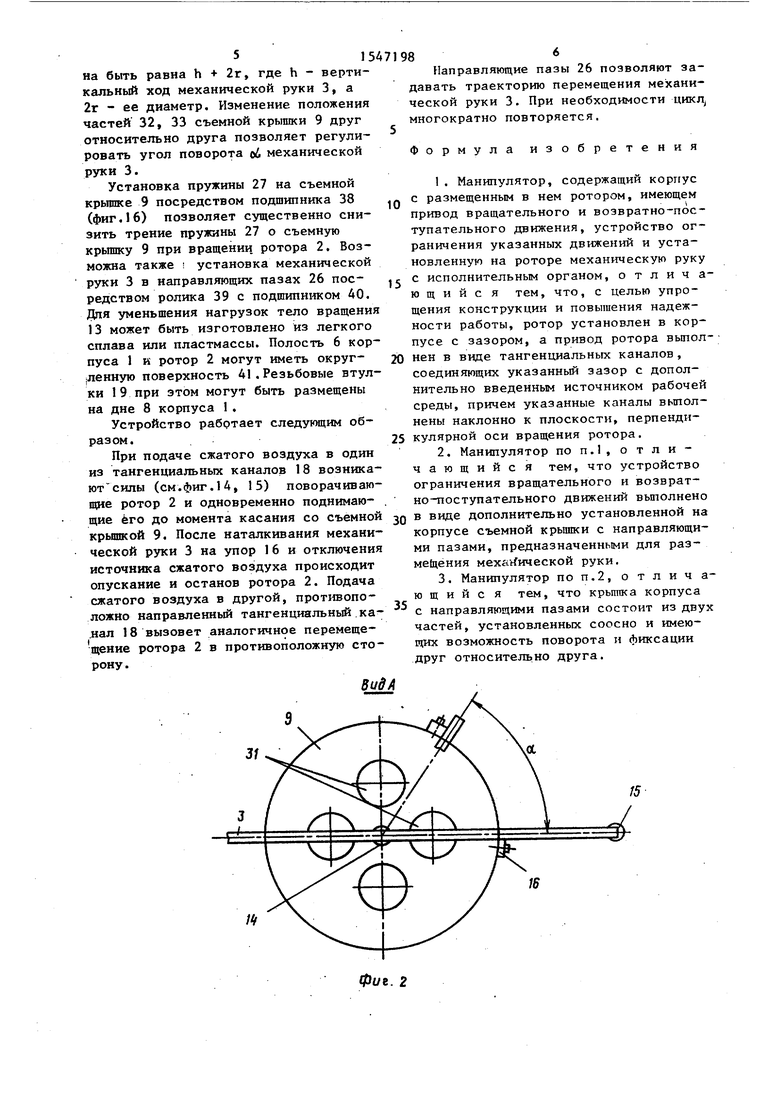
Манипулятор содержит корпус 1 , ротор 2, механическую руку 3, привод 4 вращательного и возвратно-поступательного движения, устройство 5 ограничения этих движений. Ротор 2 размещен в полости 6 корпуса 1 ц контактирует с его боковой поверхностью 7 и дном 8. На корпусе 1 установлена съемная крышка 9 с центральным отверстием 10. Ротор 2 размещен в корпусе с зазором 1 1 , при этом в полости 6 остается свободная часть 12. Ротор 2 может быть выполнен в виде полого тела вращения 13. Механическая рука 3 (или несколько таких рук посредством стой ни 14 крепится к ротору 2. Механическая рука снабжена исполнительным органом 15.
Размер h свободной части 12 определяет ход возвратно-поступательного движения ротора 2. Устройство ограни
0
5
0
5
0
5
0
5
чения движений 5 содержит упоры 16, установленные на корпусе 1 с возможностью поворота по пазам 17 и фиксации. Это обеспечивает возможность регулирования угла.
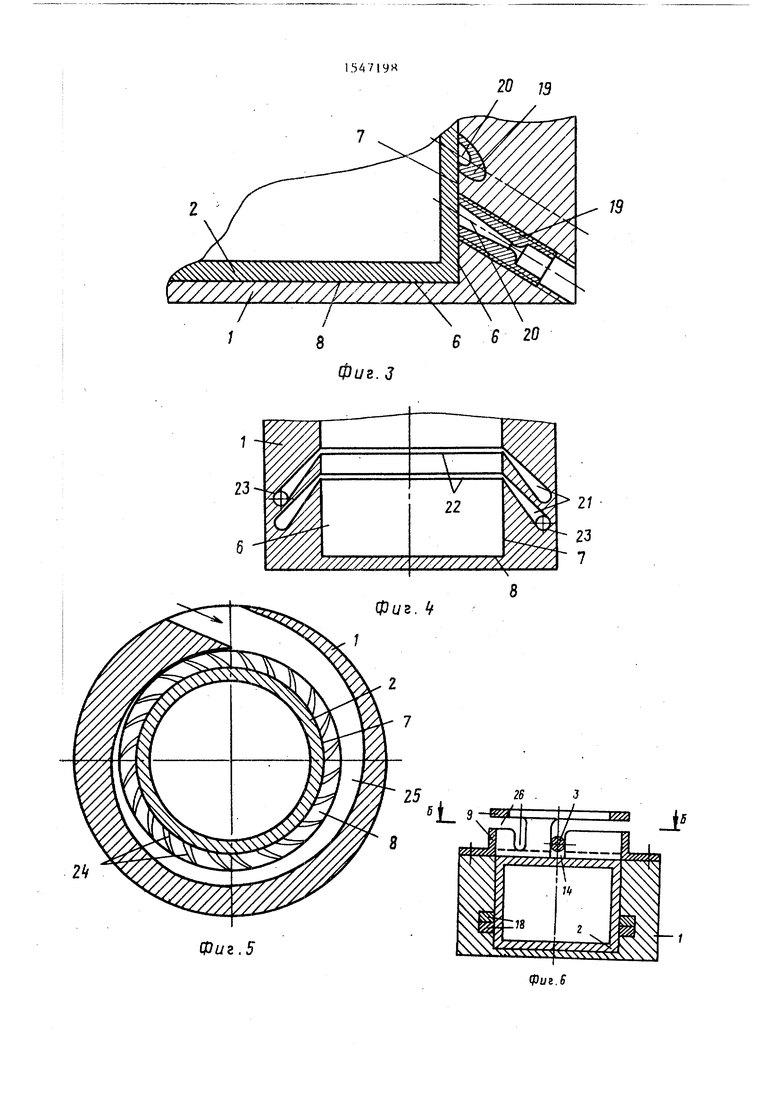
Привод 4 выполнен в виде пары противоположно направленных тангенциальных каналов 18, направленных наклонно к дну 8. Привод 4 может быть выполнен в виде соплового аппарата, который может представлять из себя набор резьбовых втулок 19 с профилированными каналами 20 (фиг.З) или два кольцевых сопла 21 с выходными щелями 22 и противоположно направленными каналами 23 для подачи рабочей среды (фиг.4), или набор лопаток 24 с подводящей спиральной камерой 25 (фиг.З).
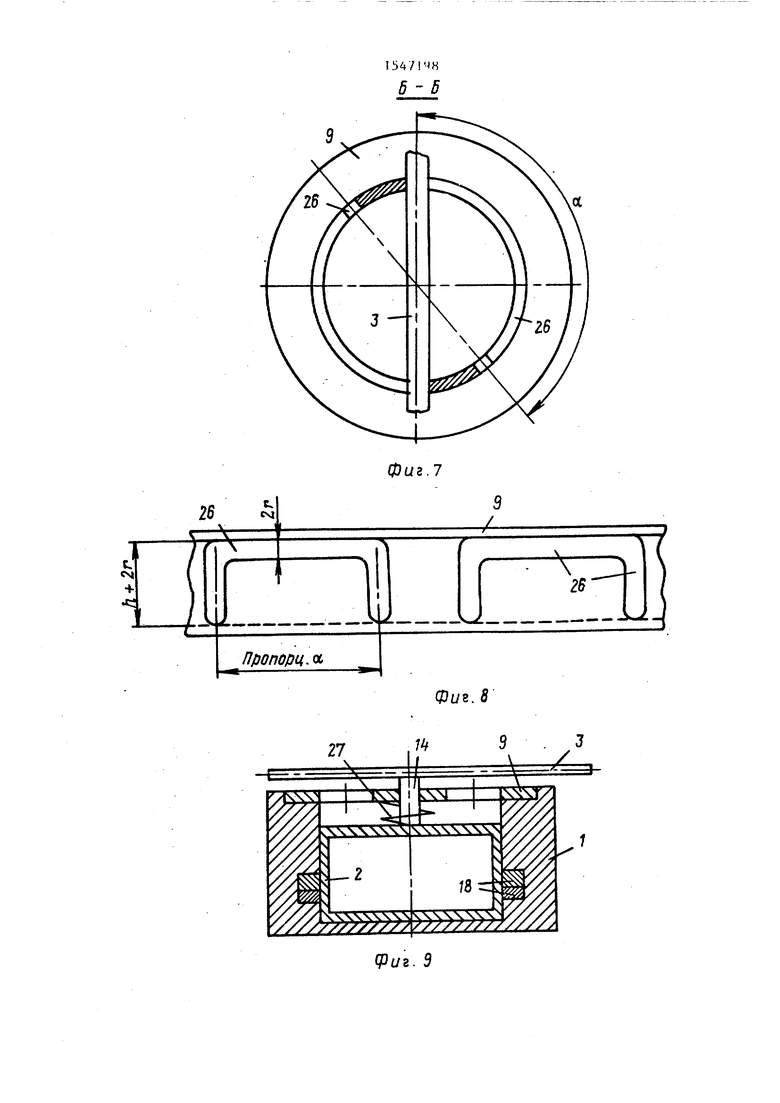
Возможно выполнение устройства ограничения движений 5 в виде съемной крышки 9 с направляющими пазами 26, предназначенными для размещения механической руки 3 (фиг.6-8). Горизонтальный размер паза 26 определяет угол поворота Об механической руки. При этом съемность крышки 9 обеспечивает возможность размещения механической руки 3 в том или ином направляющем пазу 26.
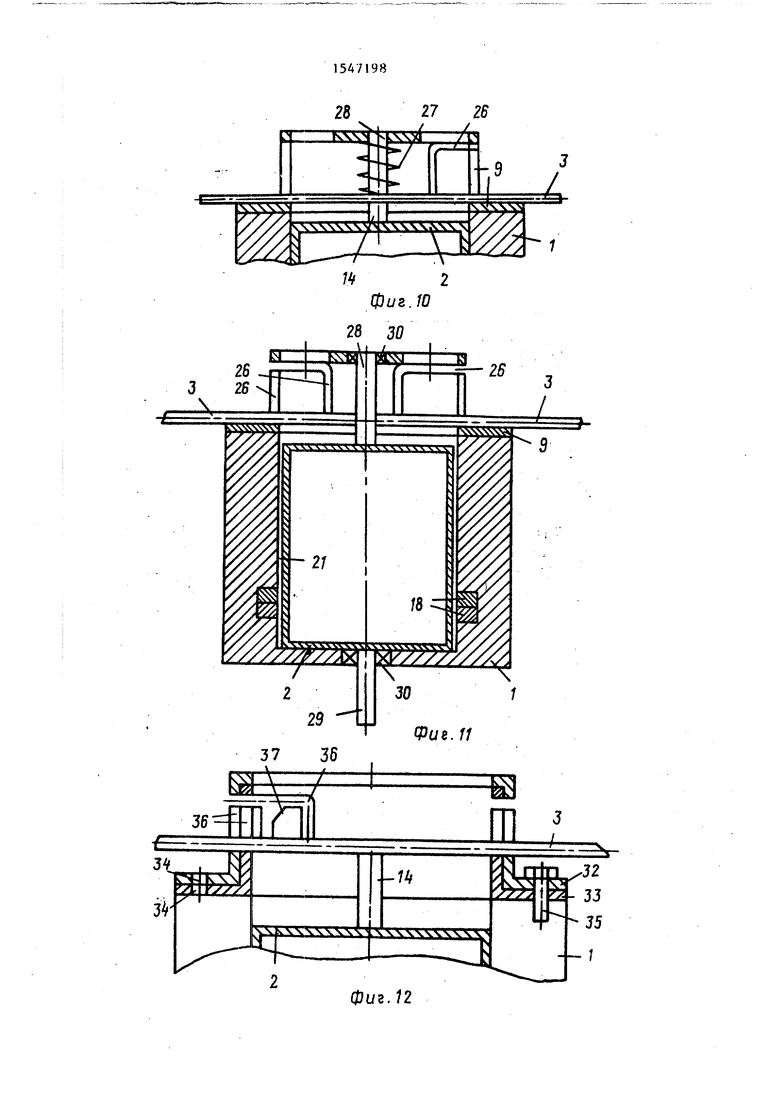
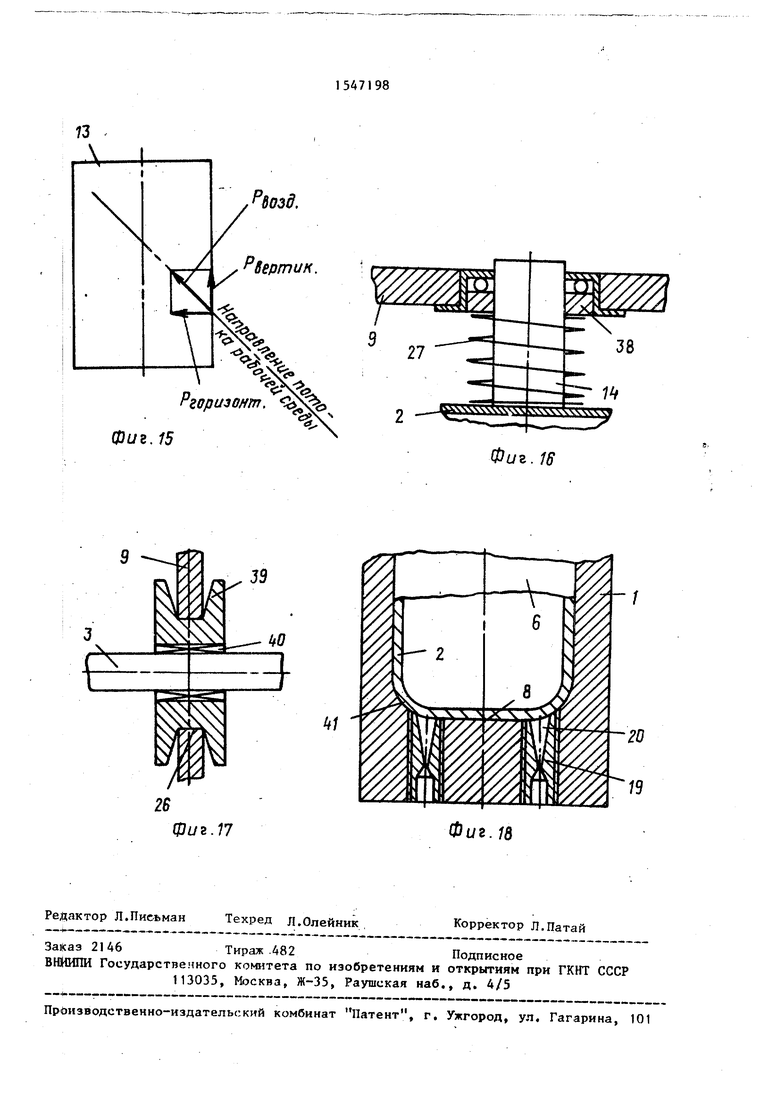
Возможен вариант выполнения манипулятора с пружиной 27, подпружинивающей ротор 2 относительно съемной крышки 9 (фиг. 9), или механическую руку 3 относительно съемной крышки 9 (Лиг.10). Во втором случае пружина 27 устанавливается не на самой стойке 14, а на стержне 28. Пружина 27 служит соответственно для ускорения или торможения вертикального перемещения механической руки 3.
Для устранения биений ротора 2 он может быть установлен на стержнях 28, 29 с помощью подшипниковых узлов 30 (фиг. 11). На съемной крышке 9 могут быть выполнены отверстия 31 (фиг.2) для стравливания сжатого воздуха в атмосферу.
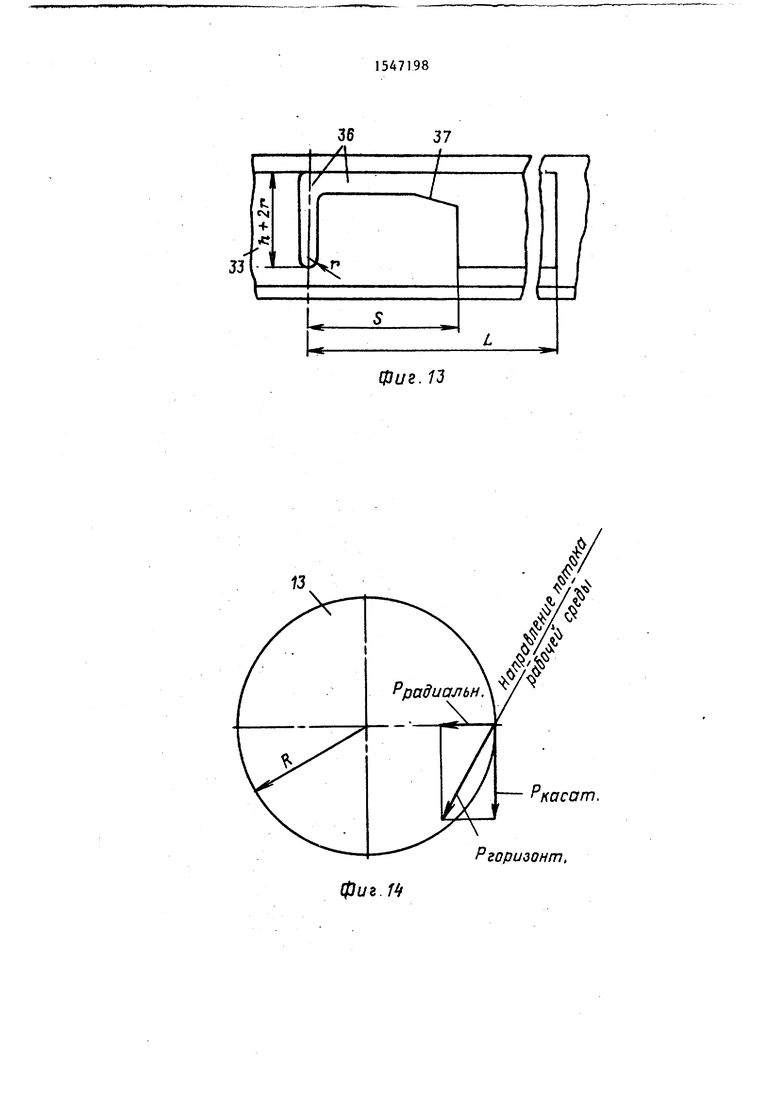
Возможно выполнение съемной крыго- ки 9, позволяющее регулировать угол поворота об (фиг.12, 13). В этом случае съемная крышка 9 выполняется из двух соосно установленных частей 32 и 33, которые имеют круговые пазы 34 и фиксируются на корпусе 1 болтами 35. В каждой из .частей 32, 33 выпол- | нено по два паза 36, симметричных относительно оси устройства. Пазы 36 имеют фаски 37. Высота пазов 36 долж
51
на быть равна h + 2r, где h - вертикальный ход механической руки 3, а 2г - ее диаметр. Изменение положения частей 32, 33 съемной крышки 9 друг относительно друга позволяет регулировать угол поворота об механической руки 3.
Установка пружины 27 на съемной крышке 9 посредством подшипника 38 (фиг.16) позволяет существенно снизить трение пружины 27 о съемную крышку 9 при вращении ротора 2. Возможна также установка механической руки 3 в направляющих пазах 26 посредством ролика 39 с подшипником 40. Для уменьшения нагрузок тело вращени 13 может быть изготовлено из легкого сплава или пластмассы. Полость 6 корпуса 1 к ротор 2 могут иметь округленную поверхность 41.Резьбовые втулки 19 при этом могут быть размещены на дне 8 корпуса 1.
Устройство работает следующим образом.
При подаче сжатого воздуха в один из тангенциальных каналов 18 возника ют силы (см.фиг.14, 15) поворачивающие ротор 2 и одновременно поднимающие его до момента касания со съемно крышкой 9. После наталкивания механической руки 3 на упор 16 и отключени источника сжатого воздуха происходит опускание и останов ротора 2. Подача сжатого воздуха в другой, противоположно направленный тангенциальный канал 18 вызовет аналогичное перемеще- щение ротора 2 в противоположную сторону.
31
Н
5
Направляющие пазы 26 позволяют задавать траекторию перемещения механической руки 3. При необходимости цикл, многократно повторяется.
Формула изобретения
с размещенным в нем ротором, имеющем
привод вращательного и возвратно-поступательного движения, устройство ограничения указанных движений и установленную на роторе механическую руку с исполнительным органом, о т л и ч а- ю щ и и с я тем, что, с целью упрощения конструкции и повышения надежности работы, ротор установлен в корпусе с зазором, а привод ротора выпол
нен в виде тангенциальных каналов, соединяющих указанный зазор с дополнительно введенным источником рабочей среды, причем указанные каналы выполнены наклонно к плоскости, перпенди- кулярной оси вращения ротора.
в виде дополнительно установленной на корпусе съемной крышки с направляющими пазами, предназначенными для размещения механической руки.
с направляющими пазами состоит из двух частей, установленных соосно и имеющих возможность поворота и фиксации друг относительно друга.
Фиг. 2
см
а &
со Э
в
«a
i
icj
T
Lx
«c
«41
CD
r
fu
з
e
ч
CO
CO
3
s
CD . cu
t3
BЛ
I
28
:чччч
XXXxVN.
/
и
г
U2
Фив. 10
27 26
/
.
и
г
-9
Ьг
Ґ7
28 30
фиъ.П
фиг Н
фиг. 13
Ркасат.
Ргоризонт,
Ргориэонт. Зэ
&
Фиг. 15
39
ifO
Ы
Фиг. 77
Редактор Л.Письман
Техред Л.Олейник
Заказ 2146Тираж 482Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
М
XVVVVXYVYWV XXYVVXXVVXVVV
Фиг. 16
79
Фиг. 1В
Корректор Л.Патай
