Изобретение относится к машиностроению, в частности к оборудованию для термической обработки деталей.
Цель изобретения - упрощение конструкции.
На чертеже изображена схема манипулятора.
Манипулятор включает основание 1, привод 2 поступательного перемещения, связанный вращательной парой 3 с валом 4, в профилированном пазу 5 которого расположен палец 6, жестко закрепленный в основании 1.
На валу 4 закреплен корпус 7, в котором параллельно оси вала 4 расположены план- ки 8, закрепленные во втулке 9 с возможностью поступательного перемещения. В корпусе 7 с возможностью вращения вокруг оси, перпендикулярной оси вала 4, установлен шкив 10, связанный огибающей его и закрепленной на нем гибкой тягой 11с втулкой 9, при этом в исходном положении устройства гибкая тяга 1 оттянута в сторону пружиной 12, закрепленной на кронштейне
13,расположенном на втулке 9. Втулка 9 связана с основанием 1 вращательной парой, а с валом 4 - вращательно-поступатель- ной.
В корпусе 7 выполнена направляющая
14,параллельная основала 4, в которой рас- положена рука 15с возможностью поступа- тельного перемещения. Рука 15 установлена также в направляющих 16 основания 1, допускающих вращение руки 15 вокруг оси вала 4. На шкиве 10 соосно ему закреплена рука 17. Обе руки 15 и 17 оснащены схватами 18, включающими, например, пневмоцилиндр 19 и магнитный захват 20. Центр тяжести схвата 18 расположен ниже оси шкива 10. Паз 5 имеет участок, параллельный оси вала 4, и участок криволинейной формы.
Технологическое оборудование, с которым используется манипулятор, включает лоток 21 для заготовок, средство термиче- ской обработки, содержащее индуктор 22, пневмоцилиндры 23 и 24 с центрами 25 и 26, крыльчатку 27. В основании 1 расположены упоры 28.
Манипулятор работает следующим об- разом.
Заготовки подаются на лоток 21. В исходном положении вал 4 опущен приводом 2 в нижнее положение. Пневмоцилиндр 19 руки 17 опускает магнитный захват 20 на заготовку, производя ее захватывание. Далее привод 2 перемещает вал 4, при этом сначала палец б перемещается по прямолинейному участку паза 5 и корпус 7 не совершает вращательного движения. За счет
смещения центра тяжести схвата 18 поворот шкива 10 и, следовательно, схвата 18 руки 17 не происходит, а натяжение гибкой связи обеспечивается пружиной 12. После выбора запаса длины гибкой тяги 11 начинается поворот схвата 18 руки 17, а при выходе пальца 6 на криволинейный участок паза 5 - поворот корпуса 7 с рукой 17 вокруг оси вала 4. Заготовка доставляется на линию центров 25 и 26. При повороте корпуса 7 рука 15 также поворачивается, оставаясь на одном уровне по высоте, и отводит обработанную заготовку на позицию разгрузки, где заготовка, взаимодействуя с упорами 28, транспортируется на дальнейшую позицию (не показано). Доставленная на линию центров 25 и 26 заготовка захватывается ими с помощью пневмоцилиндров 23 и 24 и подается в зону обработки - в индуктор 22, при этом крыльчатка 27, вращаясь вместе с заготовкой (привод вращения не показан), обеспечивает требуемый режим обработки. После обработки деталь возвращается в зону взаимодействия со схватом 18 руки 15. При обратном повороте корпуса 7, т.е. при опускании вала 4, рука 15 подходит к детали, захватывая ее, а рука 17 возвращает свой захват 18 в зону загрузки. В дальнейшем цикл повторяется.
Формула изобретения 1. Манипулятор, включающий основание, привод, связанное с ним ведущее звено, установленное с возможностью возвратно-поступательного и вращательного движения, первый и второй схваты, связанные с ведущим звеном, отличающийся тем, что, с целью упрощения конструкции, ведущее звено установлено во втулке, расположенной в основании с возможностью вращения соосно ведущему звену и связанной с ним посредством поступательного кинематического соединения, первый схват связан со шкивом, установленным на ведущем звене с возможностью вращения вокруг оси, перпендикулярной оси возвратно-поступательного движения ведущего звена, на шкиве одним концом закреплена гибкая связь, другой конец которой закреплен на втулке, причем гибкая связь оттянута в плоскости, перпендикулярной оси шкива посредством пружины, второй схват установлен в направляющих основания с возможностью вращения вокруг оси возвратно-поступательного движения ведущего звена и связан с ним посредством поступательной кинематической пары с осью, параллельной этой оси, а ведущее звено снабжено фигурным пазом, в котором расположен палец, закрепленный на основании.
5 16630346
2. Манипулятор по п. 1, от л и ч а ю щ и-3. Манипулятор по п. 1.отличающийся тем, что фигурный паз образован из двухи с я тем, что схват выполнен в виде пнев- участков линии, расположенной на цилинд-моцилиндра, шток которого оснащен электрической поверхности, один из которых па-ромагнитным захватом, раллелен оси возвратно-поступательного4. Манипулятор поп. 1, от л и ч а ю щи- движения ведущего звена, а другой выпол-5 и с я тем, что центр тяжести схвата распо- нен по кривой,ложен ниже оси вращения шкива.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи листов из стопы | 1988 |
|
SU1595770A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1984 |
|
SU1192969A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| Устройство для открывания клапанных мешков и надевания их на патрубки расфасовочных машин | 1985 |
|
SU1323469A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| Роботизированный комплекс горячей штамповки | 1988 |
|
SU1613235A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
Изобретение относится к машиностроению, в частности к оборудованию для термической обработки деталей. Цель изобретения - упрощение конструкции. Привод 2 осуществляет перемещение вала 4 вдоль и вокруг его оси. Рука 17 доставляет заготовку на позицию обработки - на линию центров 25, 26, а рука 15 осуществляет доставку обработанной детали на позицию разгрузки. Все перемещения рук 15, 17 осуществляются от одного привода 2. 3 з.п.ф-лды, 1 ил.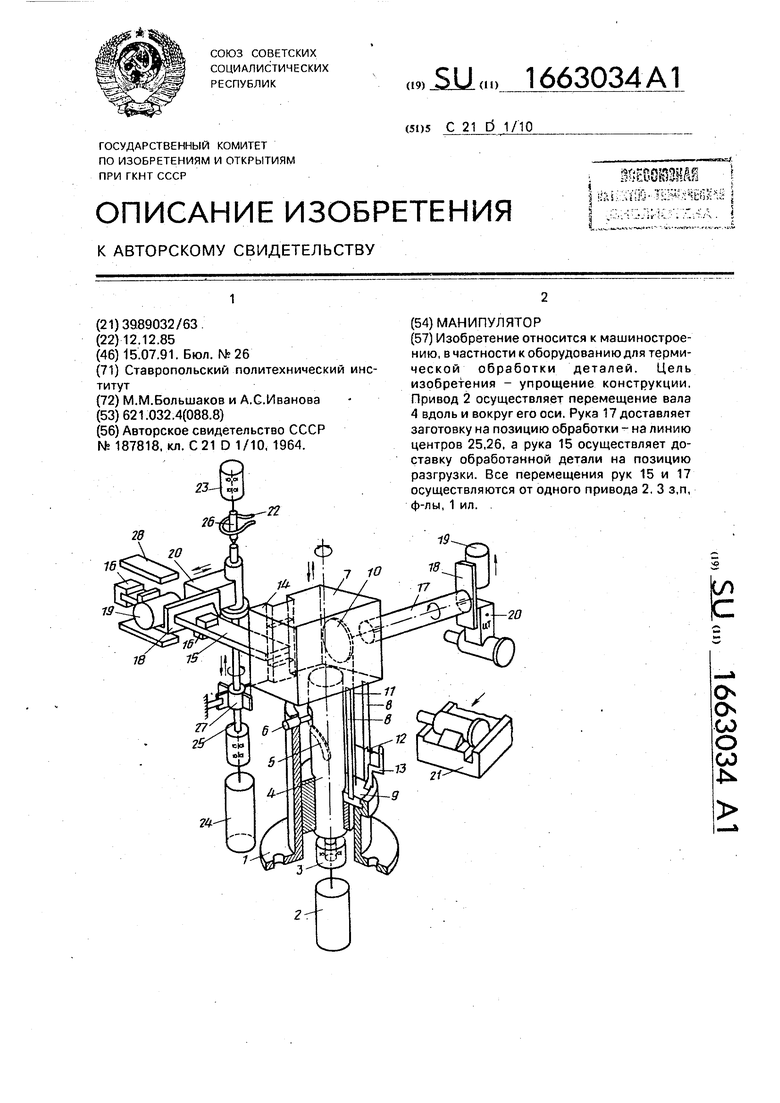
| МЕХАНИЧЕСКАЯ РУКА | 0 |
|
SU187818A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
