(54) МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЕ ДВИГАТЕЛЬ КОМБИНИРОВАННЫЙ, ЭЛЕКТРОДВИГАТЕЛЬ И ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2156870C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| Роторная машина силовой установки с внешним подводом теплоты (варианты) | 2019 |
|
RU2731466C1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНАЯ УСТАНОВКА ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2783719C1 |
| СОЕДИНИТЕЛЬНАЯ МУФТА ТРУБОПРОВОДОВ С ПРИВОДОМ | 2024 |
|
RU2832372C1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Манипулятор | 1981 |
|
SU973350A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
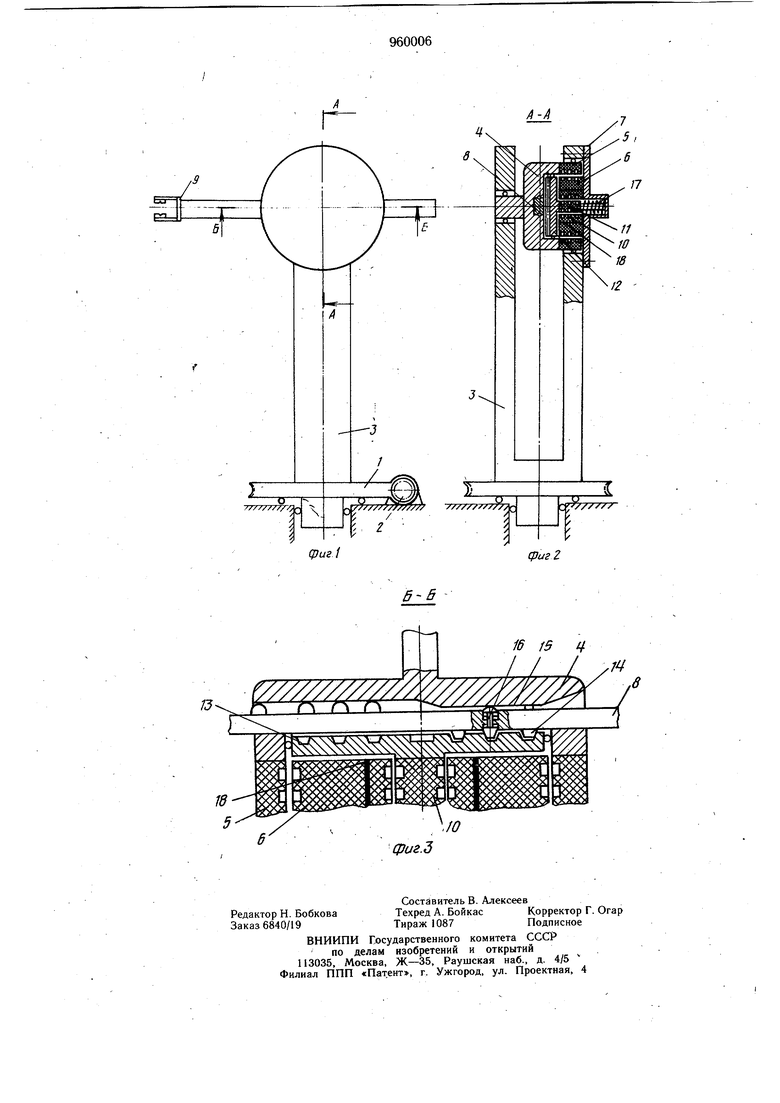
Изобретение относится к машиностроению и может быть использовано при создании и разработке средств автоматизации технологических процессов. Известен манипулятор, содержащий вертикальную поворотную стойку, горизонтально перемещающуюся механическую руку с захватом, электродвигатель и механизм преобразования его вращательного движения в прямолинейное перемещение механической руки (1 . Недостаток известного манипулятора заключается в наличии большого числа электродвигателей, обслуживающих приводы манипулятора, что делает конструкцию громоздкой и сложной и снижает точность позиционирования. Цель изобретения - упрощение конструкции, снижение габаритов, повышение точности позиционирования. Цель достигается тем, что стойка снабжена корнусом, связанным с ней шарнирно, механическая рука расположена в корпусе с возможностью перемещения относительно него, а механизм преобразования вращательного движения электродвигателя в прямолннейное движение механической руки выполнен в виде диска, имеющего на торце спиральную канавку, и пальцев, установленных на механической руке, при этом электродвигатель имеет два ротора, а его статор - две концентрично расположенные обмотки, разделенные экраном, причем один ротор расположен внутри статора, а второй - снаружи него, кроме того, внутренний ротор жестко связан с диском, внешний - с корпусом, а статор - со стойкой. Кроме того, спираль канавки диска имеет вид спирали Архимеда. Причем пальцы указанного механизма преобразования установлены на механической руке подвижно, подпружинены в сторону корпуса стойки и снабжены толкателями, а на поверхности корпуса выполнен профильный выступ, предназначенный для взаимодействия с толкателями. На фиг. 1 представлен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Манипулятор содержит поворотную планшайбу 1 (фиг. 1 и 2) с приводом 2, на которой установлена П-образная стойка 3,
цилиндрический корпус 4, установленный в свою очередь в П-образной стойке 3 с возможностью вращения вокруг горизонтальной оси от привода поворота корпуса - электродвигателя, содержащего ротор 5, жестко связанный с корпусом 4, и статор - с йаружной обмоткой 6, неподвижно установленный в осевой полости корпуса 4 и закрепленный на крышке 7. В пазу корпуса 4 с возможностью поступательного перемещения установлена механическая рука 8 с захватным органом 9, связанным с приводом выдвижения руки, которым является статор с внутренней обмоткой 10. Ротор 11 установлен внутри 10 статора. Механизм преобразования вращательного движения ротора 11 в прямолинейное движение механической руки 8 выполнен в виде поворотного диска 12 с канавкой 13 (фиг. 3), выполненной по спирали .Архимеда и взаимодействующей с пальцами 14, выполненными заодно с толкателями. Причем пальцы 14 установлены в механической руке 8 с возможностью вращения вокруг своей оси и осевого смещения и взаимодействуют толкателями с профильным выступом - торцовым кулачком 15, вьшолненным на корпусе 4. При этом силовое замыкание осуществляется посредством пружин 16. Для выборки зазоров в приводе выдвижения руки ротор 11 подпружинен в сторону корпуса 4 пружиной 17. Для предохранения взаимного влияния магнитных полей концентрично расположенных обмоток 6 и 10 статора между ними установлен защитный экран 18.
Манипулятор работает следующим образом.
При подаче сигнала в привод поворота корпуса 4 ротор 5 поворачивается на соответствующий угол, а вместе с ним -,корпус 4 вместе с механической рукой 8. При включении привода выдвижения руки ротор 11, а вместе с ним поворотный диск 12 со спиральной канавкой 13, получают вращение. При этом пальцы 14, обкатываясь по боковым поверхностям канавки 13, перемещаются поступательно вместе с механической рукой 8 относительно корпуса 4, а толкатели пальцев 14 поджимаются с помощью пружин 16 к торцовому кулачку 15 так, что пальцы 14 взаимодействуют с канавкой 13 поворотного диска 12. Зазоры в соединении пальцы 14 - канавка 13 выбираются при поджатии ротора 11, пру-, жиной 17 к корпусу 4.
При необходимости поворота захватного органа 9 вместе с манипулируемой деталью (не показана) на 180° вокруг оси механической руки 8 необходимо повернуть корпус 4 вместе с механической рукой 8 на 180° вокруг горизонтальной оси от привода поворота корпуса, а планщайбу 1 вместе со стойкой 3 - на 180° вокруг оси стойки от привода 2.
Применение цредлагаемого манипулятог ра с приводом, имеющим кратчайщие кинематические цепи, обеспечивает больщую точность позиционирования за лчет уменьшения веса руки и минимального количества звеньев. Это приводит также к увеличению
грузоподъемности робота и упрощению его конструкции при снижении габаритов манипулятора и его расширенных технологических возможностях.
Формула изобретения
и повыщения точности позиционирования, стойка снабжена корпусом, связанным с ней шарнирно, механическая рука расположена в корпусе с возможностью перемещения относительно него, а механизм преобразования вращательного движения
0 электродвигателя в прямолинейное движение механической руки выполнен в виде диска, имеющего на торце спиральную канавку, и пальцев, установленных на механической руке, при этом электродвигатель имеет два ротора, а его статор - две кон5 центрично расположенные обмотки, разделенные экраном, причем один ротор расположен внутри статора, а второй - снаружи него, кроме того, внутренний ротор жестко связан с диском, внешкий - с корпусом, а статор - со стойкой.
Источники информации, принятые во внимание при экспертизе
