Изобретение относится к области машиностроения и может быть использовано в гибких производственных системах.
Целью изобретения является расширение технологических возможностей манипулятора при использовании нереверсивного привода.
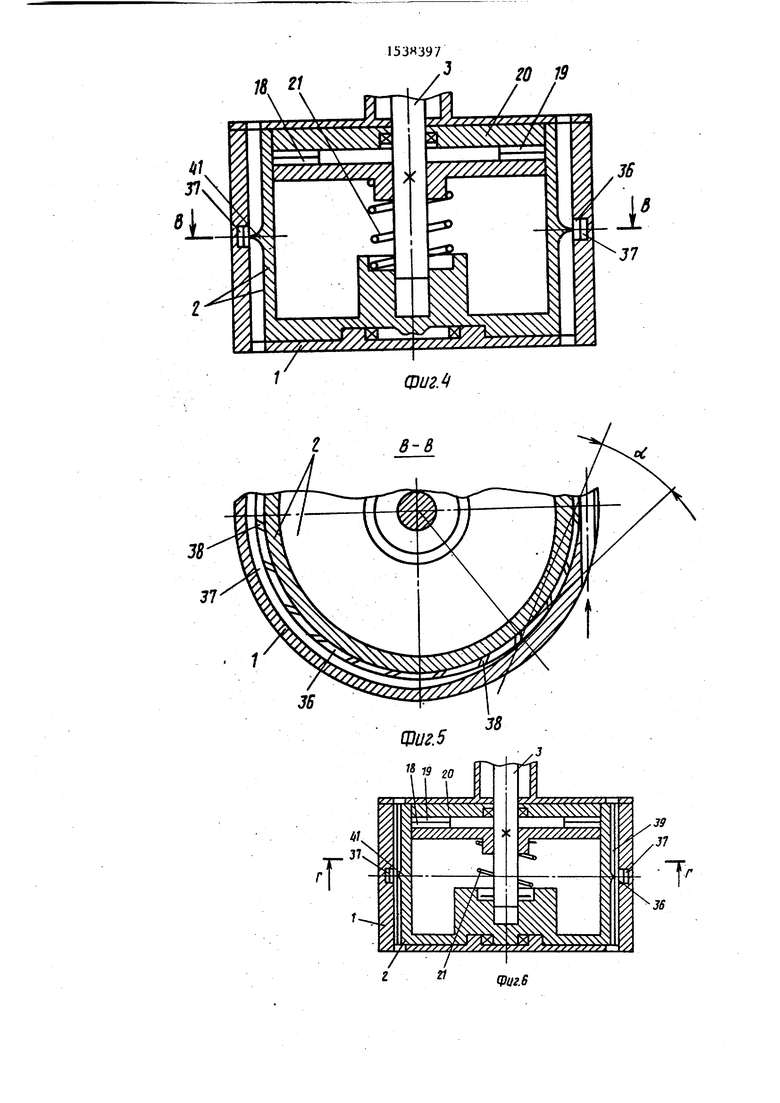
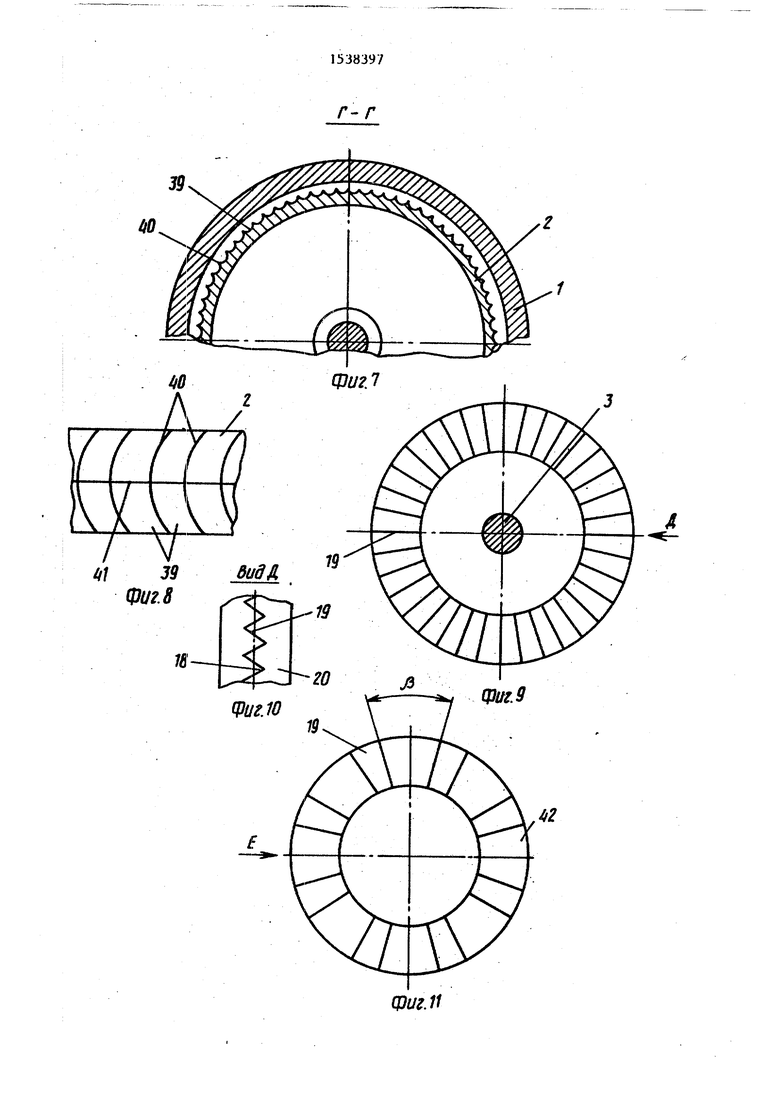
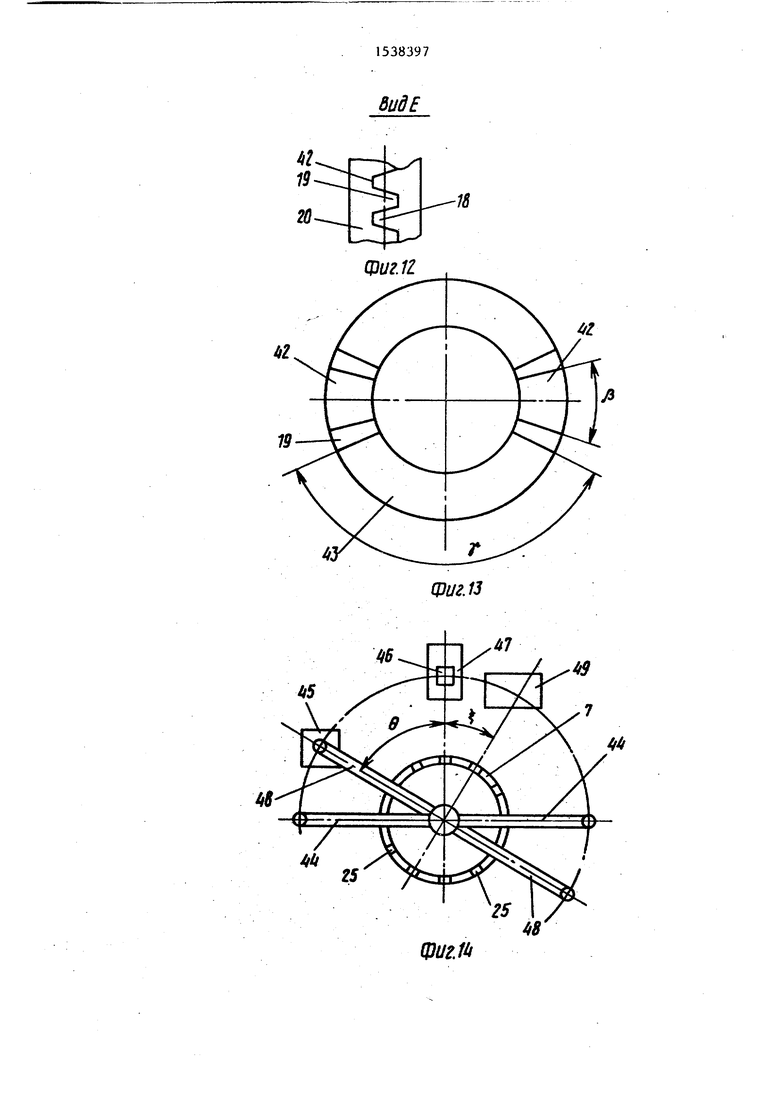
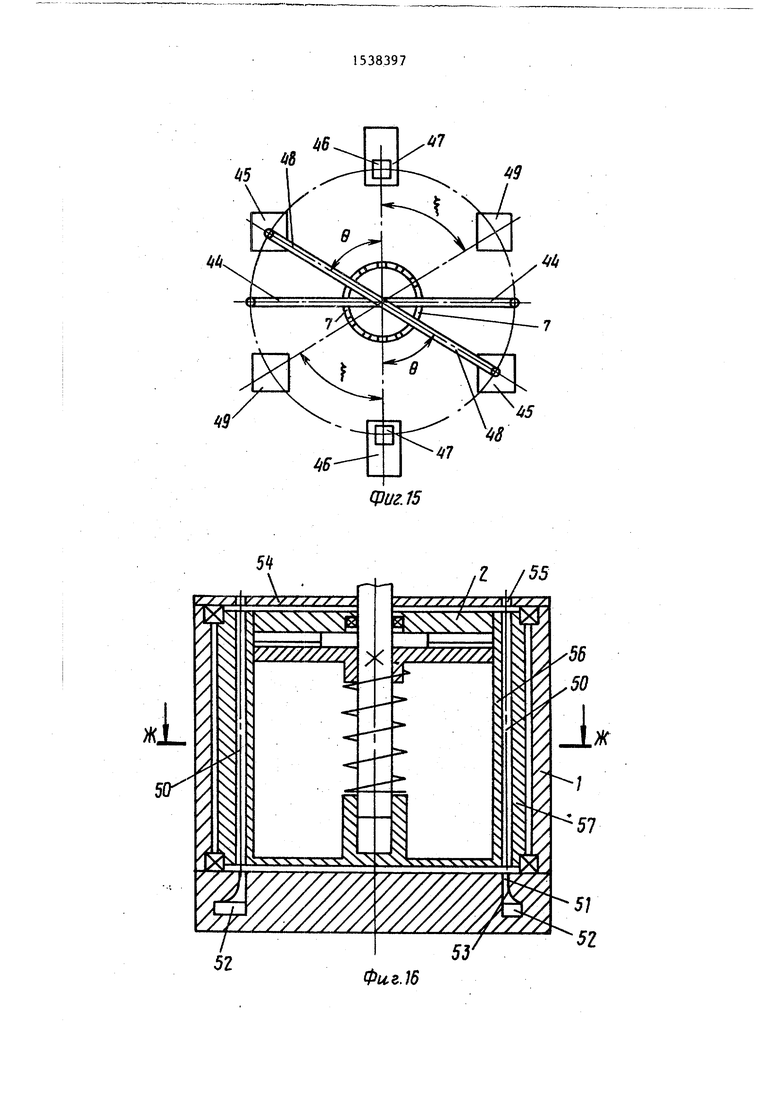
На фиг.1 изображен четырехпозици- онный двурукий манипулятор в разрезе; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4- вариант выполнения манипулятора с пневмосопловым приводом; на фиг.5 - разрез В-В на фиг.4; на фиг.6 - вариант выполнения ротора с двумя симметричными группами криволинейных каналов; на фиг.7 - разрез Г-Г на фиг.6; на фиг.З - развертка каналов на фиг.6; на фиг.9 - вариант выполнения торцовых кулачков вала и ротора; на фиг. 10,- вид Д на фиг.9; на фиг.11 - вариант выполнения торцовых кулачков; на фиг .12- вид фиг .11; на фиг .13- вариант выполнения торцовых кулачков; на фиг.14 - многопозиционный четырех- рукий манипулятор; на фиг.15 - схема возможного режима работы манипулятора; на фиг.16 - вариант выполнения манипулятора с каналами в теле ротора;
ел
оэ
00
со со
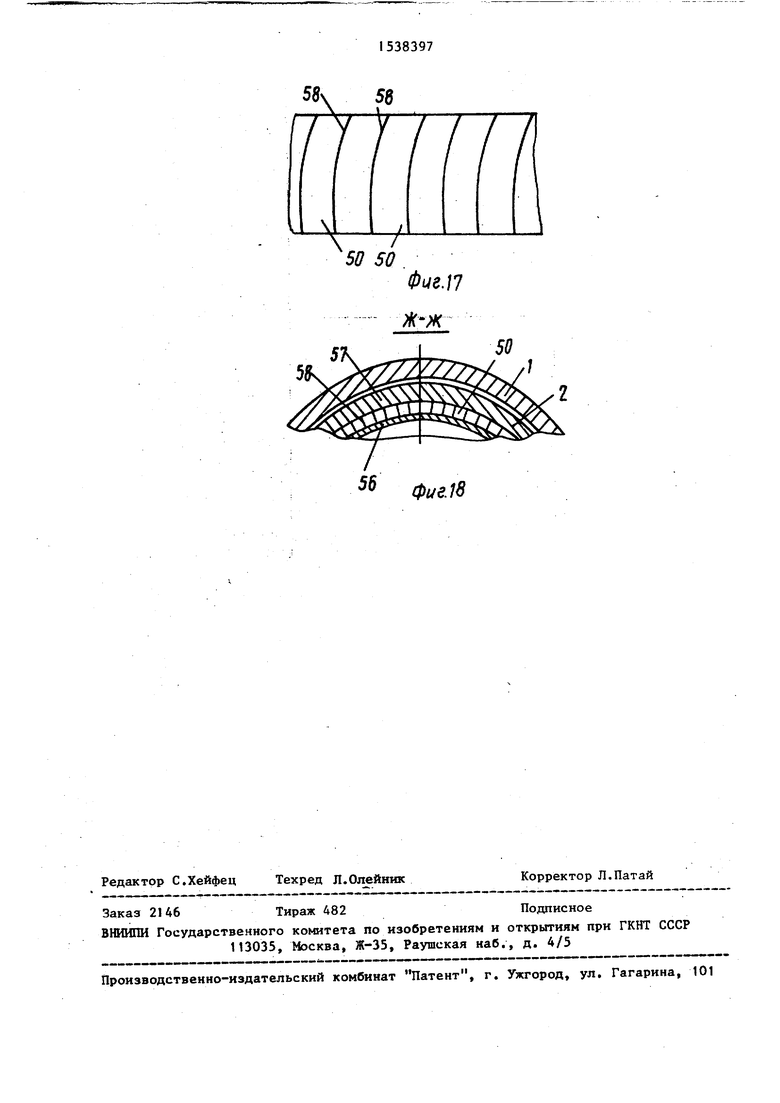
Йа фиг.17 - развертка каналов на фиг.16; на фиг.18 - разрез Ж-Ж на фиг.16.
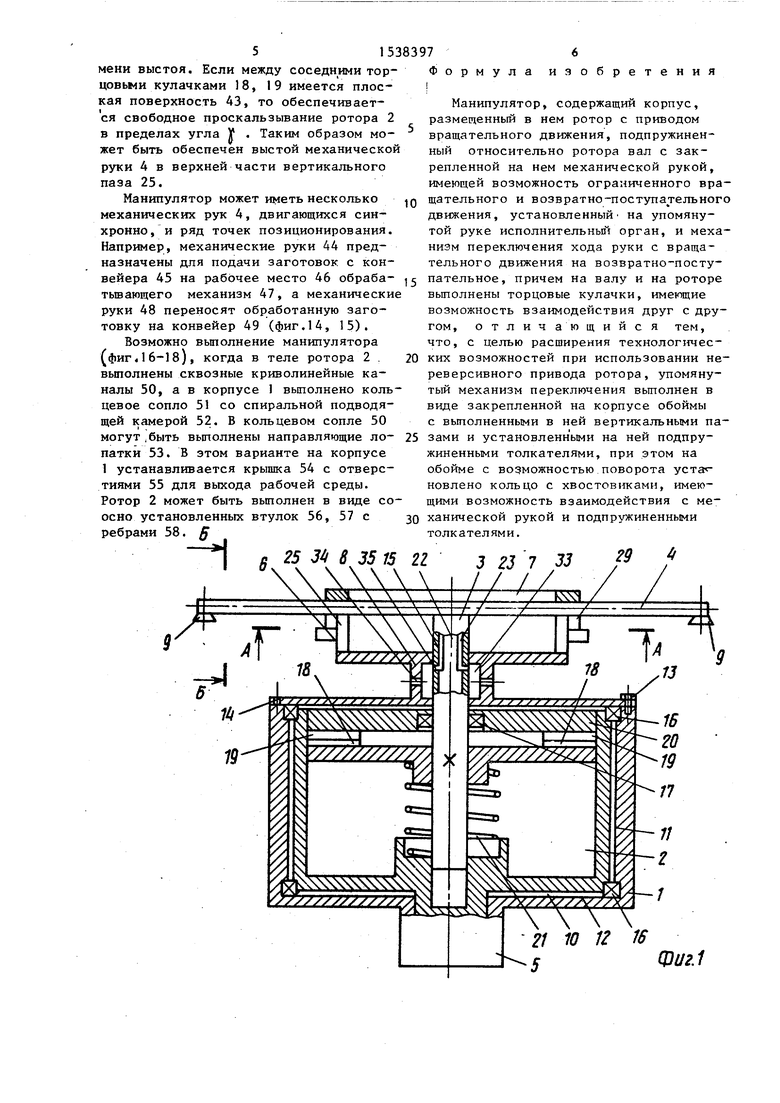
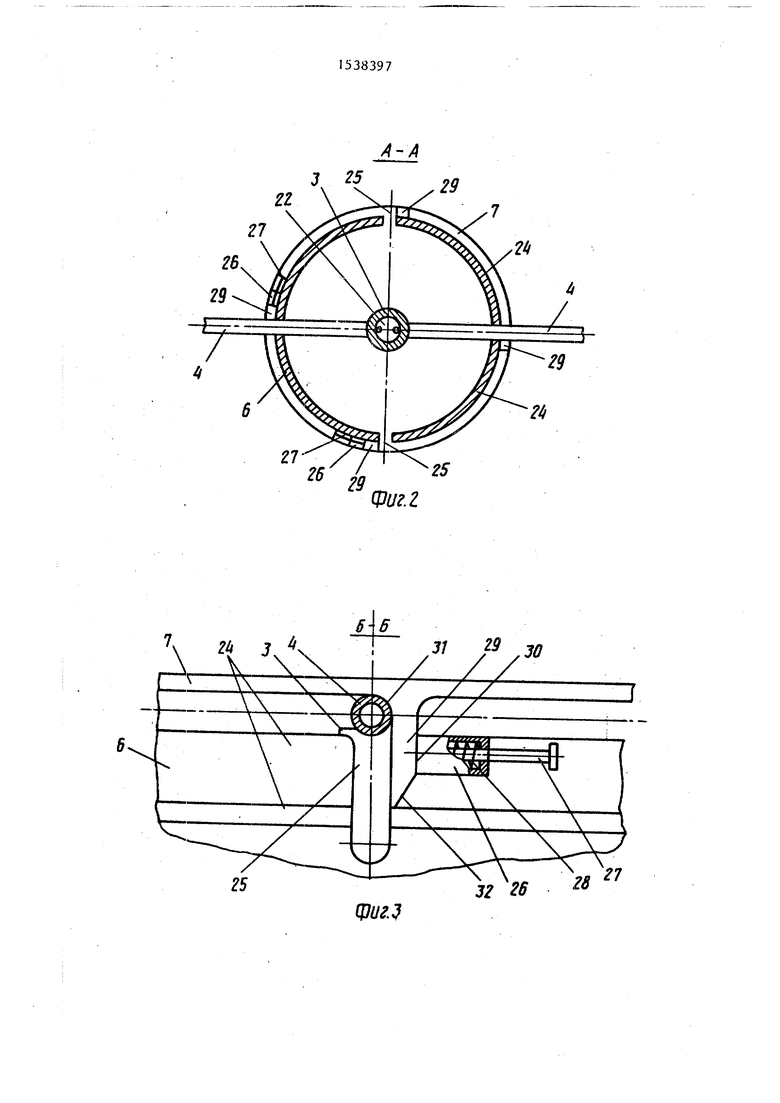
Манипулятор содержит корпус 1, ротор 2, вал 3 с закрепленными на нем механическими руками 4, привод вращательного движения 5 ротора 2, механизм переключения 6 хода руки 4 с входящим в него кольцом 7, распредели- J тель рабочей среды 8, исполнительные органы 9. Ротор 2 размещен в полости 10 корпуса 1. Полость 10 имеет поверхности 11, 12. Механизм переключения
6и распределитель рабочей среды 8 Закреплены на корпусе 1 с помощью бол- foB 13 и кольцевого паза 14, что позволяет .производить их поворот относи- fenbHO корпуса 1 с последующей фикса- ijmeft положения. 8 распределителе рабо ей среды 8 выполнено отверстие 15
для размещения вала 3. Ротор 2 может ыть установлен з корпусе 1 с помощью подшипников 16. Вал 3 может быть ус- {ановлен в роторе 2 с помощью под- 2 щипников 17. На валу 3 выполнены торговые кулачки 18, а на роторе 2 выполнены торцовые кулачки 19. Для удобст- йа сборки конструкции ротор 2 может быть выполнен со съемной крышкой 20. , Вал 3 подпружинен относительно ротора 2 пружиной 21. В полости 22 вала 3 размещены трубопроводы 23 для подвода рабочей среды к(исполнительным ор- анам 9. Механизм переключения 6 вы- $юлнен в виде обоймы 24 с вертикаль- :ыми пазами 25, направляющими движение Йеханических рук 4. На обойме 24 уста- Йовлены стопоры 26 с толкателями 27, Подпружиненными пружинами 28. Кольцо
7установлено с возможностью поворота Относительно обоймы 24 и снабжено хвостовиками 29, взаимодействующими своими боковыми поверхностями 30 с толкателями 27. Для взаимодействия с меха- Нической рукой 4 на каждом хвостовике 29 выполнены загругления 31 и скос 32. Для бесперебойной подачи рабочей среды
К исполнительным органам 9 в распределителе рабочей среды 8 выполнена полость 33, соединенная каналом 34 с источником рабочей среды. Напротив полости 33 в теле- вала 3 выполнены вход-. ные отверстия 35 трубопроводов 23.
Манипулятор работает следующим образом.
Включается привод вращательного движения 5, что приводит к вращению ротора 2. Пружина 21 обеспечивает
Г
1н:
3
5
п
5 „
,
5
5
сцепление торцовых кулачков 18, 1 9 и . вращение механической руки 4. Дойдя до закругления 31, механическая рука 4 отожмет хвостовик 29 вместе с кольцом 7 и сожмет пружину 29, отведя толкатель 27 вправо. При упоре боковой поверхности 30 хвостовика 29 в стопор 26 вращение механической руки 4 и вала 3 прекратится. Продолжающие вращаться торцовые кулачки 19 ротора 2, взаимодействуя с торцовыми кулачками 18 вала 3, опустят их вниз вместе с валом 3, что приведет к движению механической руки 4 вниз по вертикальному пазу 25. При достижении механической рукой 4 своего нижнего положения толкатель 27, приводимый в движение пружиной 28, повернет кольцо 7 с хвостовиком 29 влево. Как только торцовые кулачки 18, 19, снова войдут в зацепление под действием пружины 21, механическая рука 4 поднимется вверх по вертикальному пазу 25 и продолжит свое вращательное движение, обусловленное вращением вала 3.
Цикл работы повторяется. При этом входные отверстия 35 трубопроводов 23 сообщаются с полостью 33, что обеспечивает бесперебойную подачу рабочей среды к исполнительным органам 9.
Возможно выполнение манипулятора с пневмосопловым приводом фиг.4,5), который образуется сопловым направляющим аппаратом 36, подводящей спиральной камерой 37 и направляющими лопатками 38. В этом случае вращение ротора 2 происходит при подаче рабочей среды в спиральную камеру 37 через тангенциальные каналы, выполненные в корпусе 1,
Возможно выполнение манипулятора с двумя симметричными группами криволинейных каналов 39, выполненных на внешней поверхности ротора 2 (фиг.6-8). Обе группы каналов образованы выступами 40 и разделены между собой ребром 41. Разделение потока рабочей среды ребром 41 на две части обеспечивает компенсацию вертикальных составляющих силы воздействия потока на ротор 2.
Различные варианты выполнения торцовых кулачков 18, 19 обеспечивают различное время выстоя механической рукой 4 в нижнем положении при попадании в вертикальный паз 25. Увеличение угла jf , определяющего величину сюяза 42, приводит к увеличению вревыполнены торцовые кулачки, имеющие возможность взаимодействия друг с другом, отличающийся тем, что, с целью расширения технологических возможностей при использовании нереверсивного привода ротора, упомянутый механизм переключения выполнен в виде закрепленной на корпусе обоймы с выполненными в ней вертикальными па
вейера 45 на рабочее место 46 обраба- пательное, причем на валу и на роторе тывающего механизм 47, а механические руки 48 переносят обработанную заготовку на конвейер 49 (фиг.14, 15).
Возможно выполнение манипулятора (фиг«16-18), когда в теле ротора 220
выполнены сквозные криволинейные каналы 50, а в корпусе 1 выполнено кольцевое сопло 51 со спиральной подводящей камерой 52. В кольцевом сопле 50 могут быть выполнены направляющие ло- 25 зами и установленными на ней подпру- паткй 53. В этом варианте на корпусежиненными толкателями, при этом на
1 устанавливается крышка 54 с отверс- обойме с возможностью поворота устаг- тиями 55 для выхода рабочей среды.новлено кольцо с хвостовиками, имеюРотор 2 может быть выполнен та виде со- щими возможность взаимодействия с ме- осно установленных втулок 56, 57 с30 ханической рукой и подпружиненными
ребрами 58. gтолкателями.
25 34 8 3515 21 J 23 7 33 & 4
I / / //
выполнены торцовые кулачки, имеющие возможность взаимодействия друг с другом, отличающийся тем, что, с целью расширения технологических возможностей при использовании нереверсивного привода ротора, упомянутый механизм переключения выполнен в виде закрепленной на корпусе обоймы с выполненными в ней вертикальными па
пательное, причем на валу и на роторе
зами и установленными на ней подпру- жиненными толкателями, при этом на
21 Ю 12 16
5Фиг.1
1г,
эг. гс
S/S
Vi V 
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротор для смыкания и размыкания комплекта инструментов | 1988 |
|
SU1590393A1 |
| Манипулятор | 1982 |
|
SU1073089A1 |
| Питатель для штучных грузов | 1987 |
|
SU1519144A1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| РОТОРНАЯ МАШИНА | 2002 |
|
RU2241122C2 |
| Инструментальный блок к устройству для отрезки деталей | 1990 |
|
SU1761389A2 |
| Манипулятор | 1981 |
|
SU960006A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Топливоподающий агрегат | 1988 |
|
SU1574887A1 |
| Автомат сборки внутренних звеньев втулочнороликовых цепей | 1981 |
|
SU958034A1 |
Изобретение относится к области робототехники. Целью изобретения является расширение технологических возможностей. Устройство содержит корпус с размещенным в нем ротором с приводом вращатель но го движения. В корпусе установлен подпружиненный относительно ротора вал 3 с механической рукой 4. На роторе и на валу 3 выполнены торцовые кулачки, взаимодействующие друг с другом. На корпусе закреплена обойма 24 с вертикальными пазами 25 и подпружиненными толкателями 27.На обойме 24 с возможностью вращения установлено кольцо 7 с хвостовиками 29. При работе устройства механическая рука 4 вместе с валом 3 вращается до момента упора в закругление 31. Далее за счет взаимодействия торцовых кулачков вала 3 и ротора механическая рука 4 опускается вниз по вертикальному пазу 25. Толкатель 27 за счет распрямления пружины 28 перемещает хвостовик 29 вместе с кольцом 7 влево. После этого механическая рука 4 поднимается вверх и продолжает вращение за счет взаимодействия торцовых кулачков. Затем цикл повторяется. 18 ил. (О
SZ
W
41
2 2ПСЬ
12
22
ъ
СЧ1
«SJ
%
&
ос
-ч.
м
М глсй
2i
52
W
9b
здпд
/:6csegi
to
iff
917
Б
in
gi-гяф
91 wto
9b
917
94
91
Јбееш
8
| Авторское свидетельство | |||
| Автоматическая рука | 1979 |
|
SU818819A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
