Изобретение относится к текстильному машиностроению и может быть использовано вкокономотальном производстве на кокономотальных автоматах, работающих по принципу размотки коконов в полунагруженном состоянии.
Целью изобретения является снижение отходов шелка-сырца.
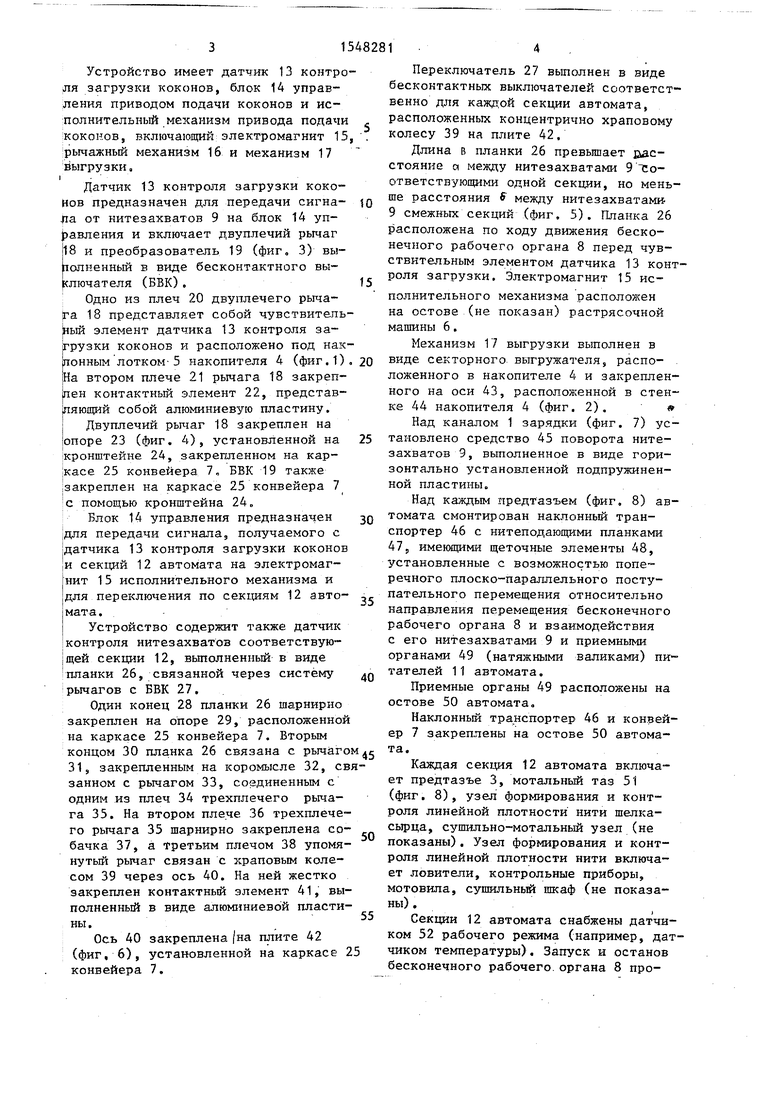
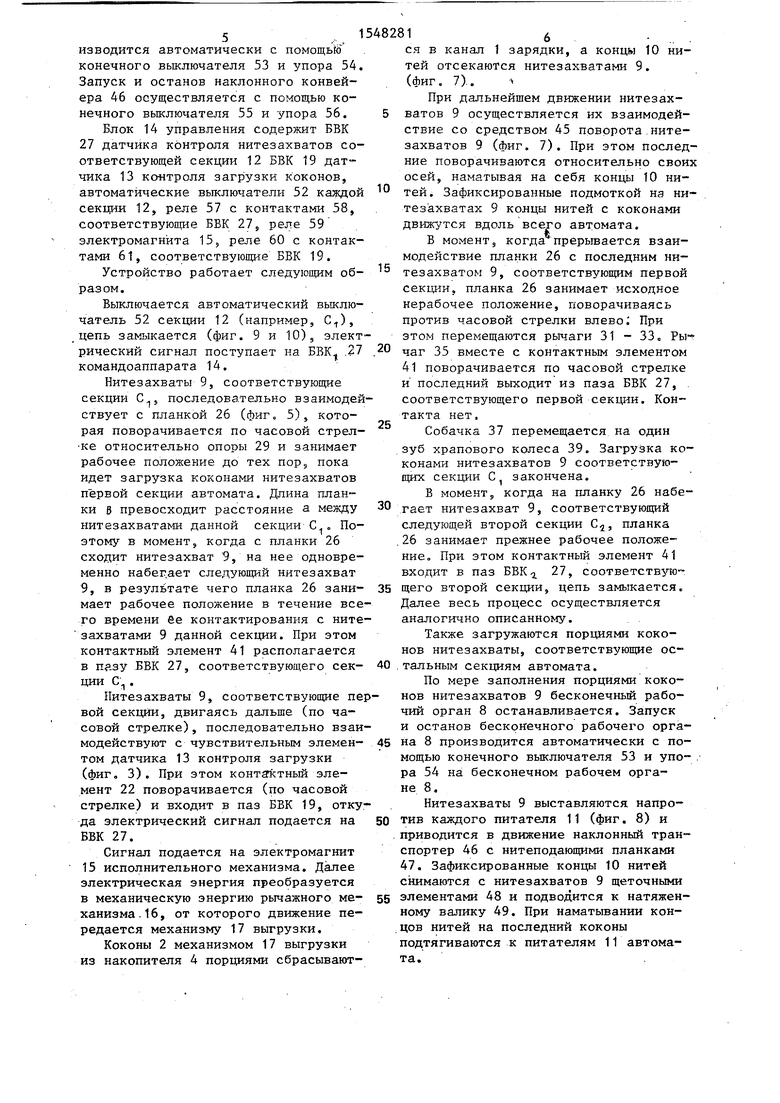
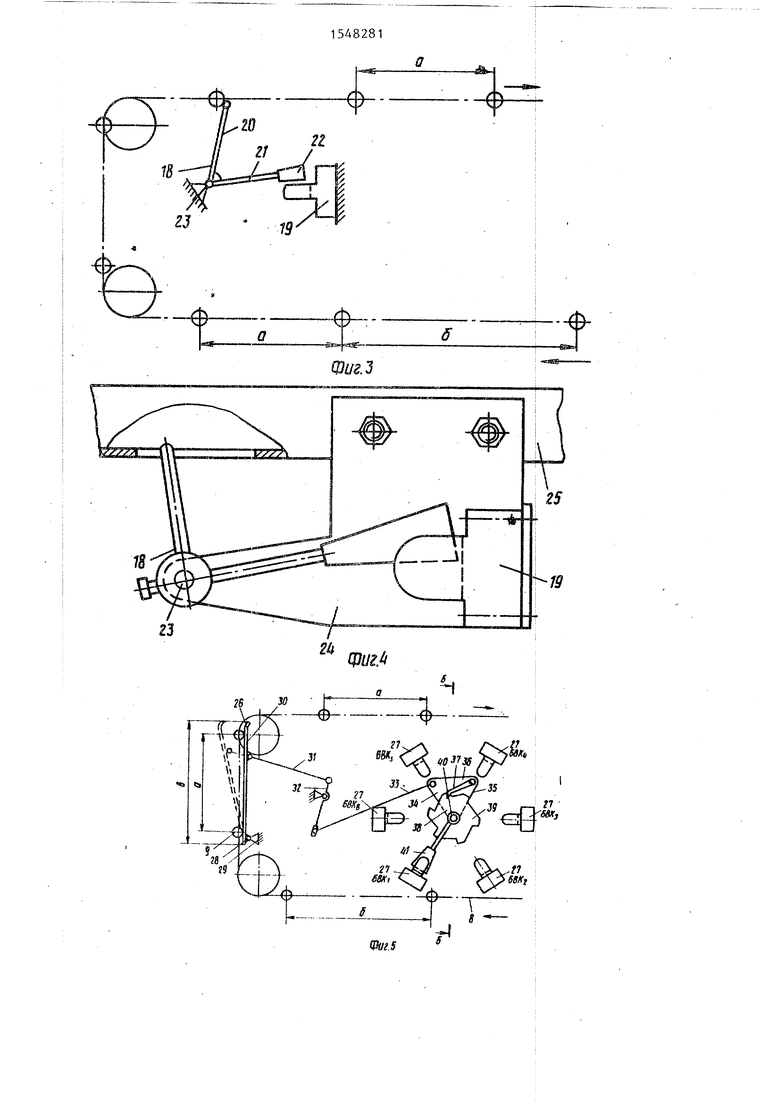
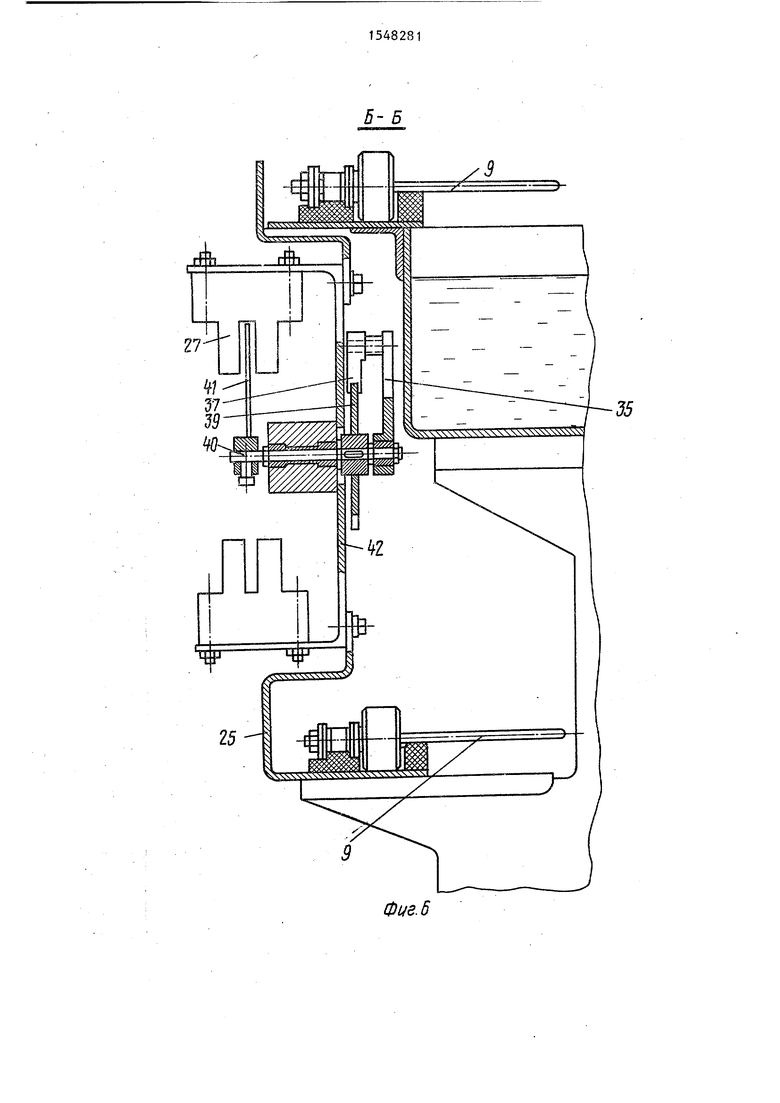
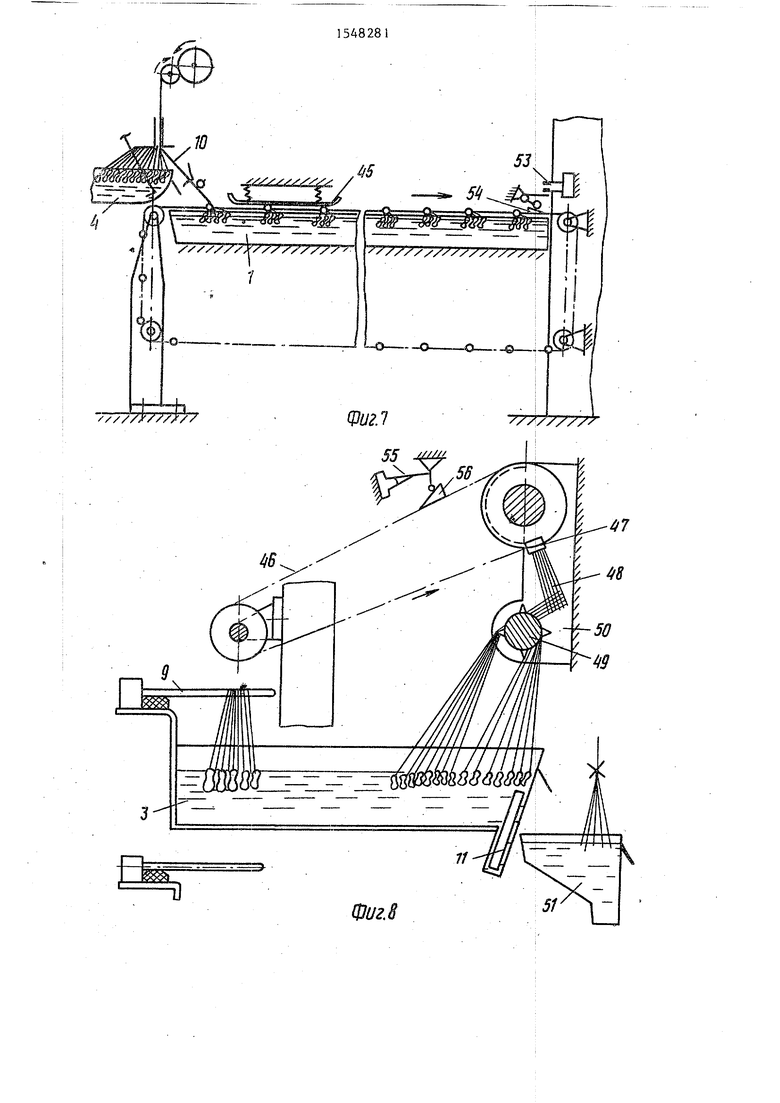
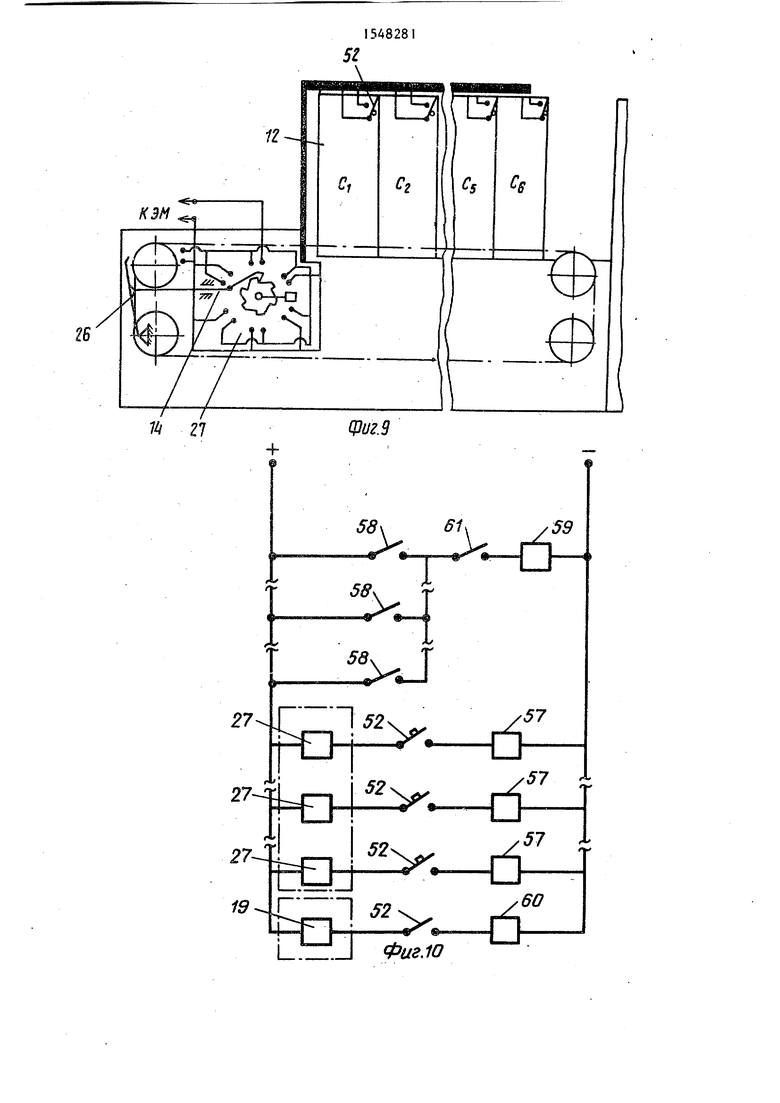
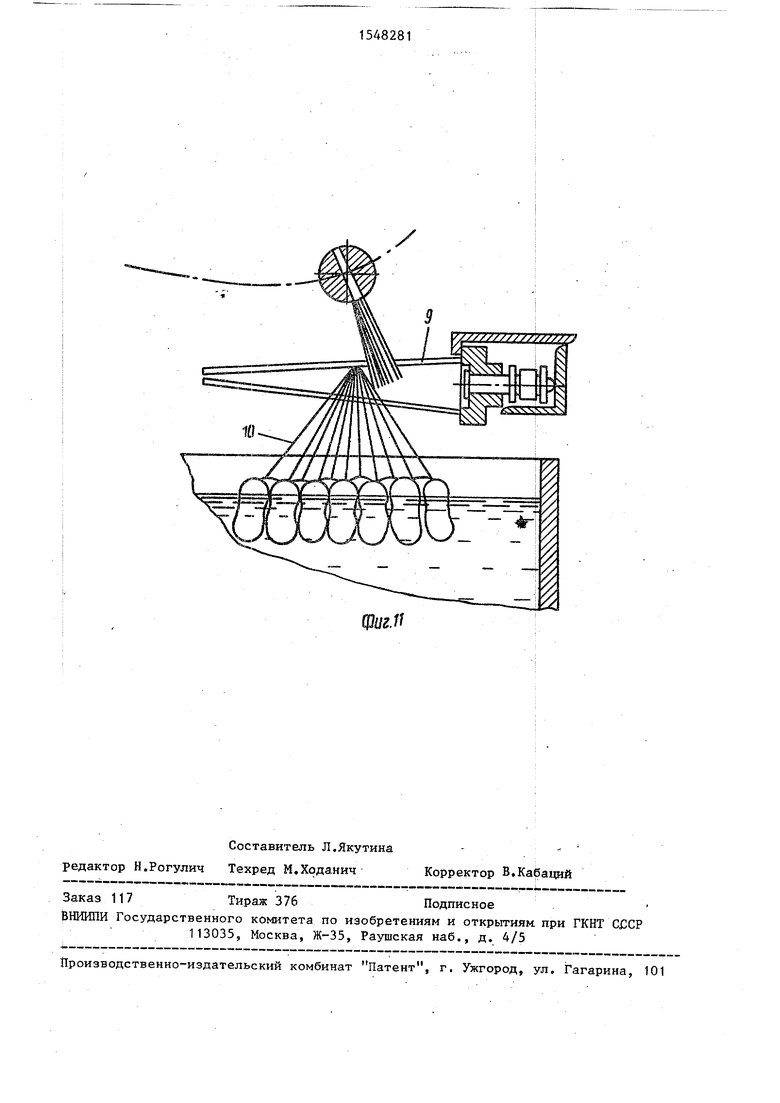
На фиг. 1 показано устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1j на фиг. 3 - датчик контроля загрузки коконов; на фиг. 4 - его крепление; на фиг. 5 - датчик контроля нитезахватов соответствующей секции; на фиг. 6 - разрез Б-Б на фиг. 5; на фиг. 7 - средство поворота нитезахватов; на фиг. 8 - наклонный транспортер с нитеподающими планками; на фиг. 9 - схема связи командоаппа- рата с секциями автомата; на фиг. 10 - блок управления приводом подачи коконов; на фиг. 11 - нитезахват.
Устройство для подачи коконов к питателям кокономотального автомата содержит канал 1 зарядки коконами 2 предтазий 3 секционного автомата, примыкающий к накопителю 4 с наклонным лотком 5 растрясочной машины 6 (фиг. 1, 2 и 8). Вдоль канала 1 зарядки установлен конвейер 7, имеющий бесконечный рабочий орган 8, несущий шарнирно смонтированные нитезахваты 9, представляющие собой вилки для наматывания концов 10 нитей коконов ,
Нитезахваты 9 расположены с шагом а , равным расстоянию между питателями 11 автомата (фиг. 2 и 8).
Расстояние 6 от последнего ните- захвата 9, соответствующего данной секции 12 автомата, до первого ните- захвата 9 следующей секции превышает расстояние а между нитезахватами 9 одной секции.
ЩЕ&
О1 Ј
00
ю
00
Устройство имеет датчик 13 контроля загрузки коконов, блок 14 управления приводом подачи коконов и исполнительный механизм привода подачи коконов, включающий электромагнит 15, рычажный механизм 16 и механизм 17 выгрузки.
Датчик 13 контроля загрузки коко- Нов предназначен для передачи сигна- jia от нитезахватов 9 на блок 14 управления и включает двуплечий рычаг 18 и преобразователь 19 (фиг. 3) выполненный в виде бесконтактного выключателя (БВК).
Одно из плеч 20 двуплечего рыча- |га 18 представляет собой чувствитель- ный элемент датчика 13 контроля заЕрузки коконов и расположено под нак- онным лотком 5 накопителя 4 (фиг.1), а втором плече 21 рычага 18 закреп- (пен контактный элемент 22, представляющий собой алюминиевую пластину. Двуплечий рычаг 18 закреплен на опоре 23 (фиг. 4), установленной на кронштейне 24, закрепленном на каркасе 25 конвейера 7. БВК 19 также закреплен на каркасе 25 конвейера 7| с помощью кронштейна 24„
Блок 14 управления предназначен для передачи сигнала, получаемого с датчика 13 контроля загрузки коконов и секций 12 автомата на электромагнит 15 исполнительного механизма и .для переключения по секциям 12 авто- мата.
Устройство содержит также датчик контроля нитезахватов соответствующей секции 12, выполненный в виде планки 26, связанной через систему рычагов с БВК 27.
Один конец 28 планки 26 шэрнирно закреплен на опоре 29, расположенной на каркасе 25 конвейера 7. Вторым концом 30 планка 26 связана с рычагом 31, закрепленным на коромысле 32, связанном с рычагом 33, соединенным с одним из плеч 34 трехплечего рычага 35. На втором плече 36 трехплечего рычага 35 шарнирно закреплена со- бачка 37, а третьим плечом 38 упомянутый рычаг связан с храповым колесом 39 через ось 40. На ней жестко закреплен контактный элемент 41, выполненный в виде алюминиевой пластины.
Ось 40 закреплена /на плите 42 (фиг, 6), установленной на каркасе 2 конвейера 7.
Переключатель 27 выполнен в виде бесконтактных выключателей соответственно для каждой секции автомата, расположенных концентрично храповому колесу 39 на плите 42.
Длина в планки 26 превышает расстояние а между нитезахватами 9 Соответствующими одной секции, но меньше расстояния 6 между нитезахватами- 9 смежных секций (фиг. 5). Планка 26 расположена по ходу движения бесконечного рабочего органа 8 перед чувствительным элементом датчика 13 контроля загрузки. Электромагнит 15 исполнительного механизма расположен на остове (не показан) растрясочной машины 6.
Механизм 17 выгрузки выполнен в виде секторного выгружателя, расположенного в накопителе 4 и закрепленного на оси 43, расположенной в стенке 44 накопителя 4 (фиг. 2).
Над каналом 1 зарядки (фиг. 7) установлено средство 45 поворота ните- захватов 9, выполненное в виде горизонтально установленной подпружиненной пластины.
Над каждым предтазъем (фиг. 8) автомата смонтирован наклонный транспортер 46 с нитеподающими планками 47, имеющими щеточные элементы 48, установленные с возможностью поперечного плоско-параллельного поступательного перемещения относительно направления перемещения бесконечного рабочего органа 8 и взаимодействия с его нитезахватами 9 и приемными органами 49 (натяжными валиками) питателей 11 автомата.
Приемные органы 49 расположены на остове 50 автомата.
Наклонный транспортер 46 и конвейер 7 закреплены на остове 50 автомата.
Каждая секция 12 автомата включает предтазъе 3, мотальный таз 51 (фиг. 8), узел формирования и контроля линейной плотности нити шелка- сырца, сушильно-мотальный узел (не показаны). Узел формирования и контроля линейной плотности нити включает ловители, контрольные приборы, мотовила, сушильный шкаф (не показаны) .
Секции 12 автомата снабжены датчиком 52 рабочего режима (например, датчиком температуры). Запуск и останов бесконечного рабочего органа 8 производится автоматически с помощьй конечного выключателя 53 и упора 54. Запуск и останов наклонного конвейера 46 осуществляется с помощью конечного выключателя 55 и упора 56.
Блок 14 управления содержит БВК 27 датчика контроля нитезахватов соответствующей секции 12 БВК 19 датчика 13 ко-нтроля загрузки коконов, автоматические выключатели 52 каждой секции 12, реле 57 с контактами 58, соответствующие БВК 27, реле 59 электромагнита 155 реле 60 с контактами 61, соответствующие БВК 19.
Устройство работает следующим образом.
Выключается автоматический выключатель 52 секции 12 (например, С.,), цепь замыкается (фиг. 9 и 10), электБВК,
7 20
рическии сигнал поступает на командоаппарата 14.
Нитезахваты 9, соответствующие секции C1S последовательно взаимодействует с планкой 26 (фиг. 5)} которая поворачивается по часовой стрелке относительно опоры 29 и занимает рабочее положение до тех пор, пока идет загрузка коконами нитезахватов первой секции автомата. Длина планки б превосходит расстояние а между нитезахватами данной секции С . Поэтому в момент, когда с планки 26 сходит нитезахват 9, на нее одновременно набегает следующий нитезахват 9, в результате чего планка 26 занимает рабочее положение в течение всего времени ве контактирования с нитезахватами 9 данной секции. При этом контактный элемент 41 располагается в пазу БВК 27, соответствующего секции сл.
Нитезахваты 9, соответствующие первой секции, двигаясь дальше (по часовой стрелке), последовательно взаи25
30
35
40
В момент, когда прерывается взаимодействие планки 26 с последним ни- тезахватом 9, соответствующим первой секции, планка 26 занимает исходное нерабочее положение, поворачиваясь против часовой стрелки влево; При этом перемещаются рычаги 31 - 33„ Рычаг 35 вместе с контактным элементом 41 поворачивается по часовой стрелке и последний выходит из паза БВК 27, соответствующего первой секции. Контакта нет.
Собачка 37 перемещается на один
зуб храпового колеса 39. Загрузка коконами нитезахватов 9 соответствующих секции С1 закончена.
В момент, когда на планку 26 набегает нитезахват 9, соответствующий следующей второй секции С2, планка 26 занимает прежнее рабочее положение. При этом контактный элемент 41 входит в паз БВКа 27, соответствующего второй секции, цепь замыкается. Далее весь процесс осуществляется аналогично описанному.
Также загружаются порциями коконов нитезахваты, соответствующие остальным секциям автомата.
По мере заполнения порциями коконов нитезахватов 9 бесконечный рабочий орган 8 останавливается. Запуск и останов бесконечного рабочего орга-
модействуют с чувствительным элемен- 45 на 8 производится автоматически с потом датчика 13 контроля загрузки (фиг. 3). При этом контактный элемент 22 поворачивается (по часовой стрелке) и входит в паз БВК 19, откуда электрический сигнал подается на БВК 27.
Сигнал подается на электромагнит 15 исполнительного механизма. Далее электрическая энергия преобразуется в механическую энергию рычажного механизма 16, от которого движение передается механизму 17 выгрузки.
Коконы 2 механизмом 17 выгрузки из накопителя 4 порциями сбрасывают
482816
ся в канал 1 зарядки, а концы 10 нитей отсекаются нитезахватами 9. (фиг. 7).
При дальнейшем движении нитезах- 5 ватов 9 осуществляется их взаимодействие со средством 45 поворота нитезахватов 9 (фиг. 7). При этом последние поворачиваются относительно своих осей, наматывая на себя концы 10 нитей. Зафиксированные подмоткой на ни- тезахватах 9 концы нитей с коконами
10
15
20
25
30
35
40
движутся вдоль всего автомата.
В момент, когда прерывается взаимодействие планки 26 с последним ни- тезахватом 9, соответствующим первой секции, планка 26 занимает исходное нерабочее положение, поворачиваясь против часовой стрелки влево; При этом перемещаются рычаги 31 - 33„ Рычаг 35 вместе с контактным элементом 41 поворачивается по часовой стрелке и последний выходит из паза БВК 27, соответствующего первой секции. Контакта нет.
Собачка 37 перемещается на один
зуб храпового колеса 39. Загрузка коконами нитезахватов 9 соответствующих секции С1 закончена.
В момент, когда на планку 26 набегает нитезахват 9, соответствующий следующей второй секции С2, планка 26 занимает прежнее рабочее положение. При этом контактный элемент 41 входит в паз БВКа 27, соответствующего второй секции, цепь замыкается. Далее весь процесс осуществляется аналогично описанному.
Также загружаются порциями коконов нитезахваты, соответствующие остальным секциям автомата.
По мере заполнения порциями коконов нитезахватов 9 бесконечный рабочий орган 8 останавливается. Запуск и останов бесконечного рабочего орга-
мощью конечного выключателя 53 и упора 54 на бесконечном рабочем органе 8.
Нитезахваты 9 выставляются напротив каждого питателя 11 (фиг. 8) и приводится в движение наклонный транспортер 46 с нитеподающими планками 47. Зафиксированные концы 10 нитей снимаются с нитезахватов 9 щеточными
элементами 48 и подводится к натяжен- ному валику 49. При наматывании концов нитей на последний коконы подтягиваются к питателям 11 автомата.
Запуск и останов наклонного конвейера 46 осуществляются с помощью конечного выключателя 55 и упора 56 на цепи наклонного транспортера 46.
При повреждении одной из секций 12 автомата (например, выход из строя нагревательного элемента в сушильном шкафу секции) отключается автоматический выключатель данной секции, т.е. прекращается подача электрического сигнала от этой секции на БВК 27 командоаппарата. Цепь размыкается, соответственно прекращается подача электрического сигнала на исполнительный механизм, коконы не выгружаются на нитезахваты этой секции.
Формула изобретения
1„ Устройство для подачи коконов к питателям кокономотального автомата, содержащее канал зарядки коконами предтазий автомата, размещенных под наклонным лотком накопителя раст- рясочной машины, привод подачи коконов, установленный вдоль канала зарядки, бесконечный рабочий орган, I снабженный шарнирно закрепленными на нем нитезахватами, расположенными с шагом, соответствующим расстоянию между питателями автомата, и смонтированные над каждым тазом нитепода
0
0
5 30
ющие планки, отличающееся тем, что, с целью снижения отходов шелка-сырца, оно снабжено блоком управления приводом подачи коконов и связанными с соответствующими его входами датчиком контроля загрудки коконов, размещенным перед ним датчиком контроля нитезахватов соответствующей секции и датчиками рабочего режима секций кокономотального автомата, t
2.Устройство по п. 1, отличающееся тем, что датчик контроля загрузки коконов выполнен в виде преобразователя и двуплечего рычага, на одном плече которого закреплен чувствительный элемент для взаимодействия с преобразователем.
3.Устройство по п. 1, о т л и- чающееся тем, что датчик контроля нитезахватов соответствующей секции выполнен в виде выключателей
и установленной с возможностью взаимодействия с нитезахватами планки, один конец которой закреплен шарнирно, а другой кинематически связан с выключателями, при этом длина планки превышает расстояние между нитезахва- тами, соответствующими одной секции, но меньше расстояния между нитезахватами смежных секций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи коконов к питателям кокономотального автомата | 1981 |
|
SU1033589A1 |
| Конвейер для транспортировки коконов к ловителям кокономотального автомата | 1972 |
|
SU506552A1 |
| Устройство для подачи коконов в "розу" кокономотального автомата | 1983 |
|
SU1147778A1 |
| Коконозагрузочное устройство питателя кокономотального автомата | 1984 |
|
SU1252402A1 |
| КОКОНОМОТАЛЬНЫЙ АВТОМАТ | 1953 |
|
SU99397A1 |
| Распределитель питателя кокономотального автомата | 1990 |
|
SU1747549A1 |
| Кокономотальный автомат | 1947 |
|
SU113880A1 |
| Питатель коконов кокономотального автомата | 1982 |
|
SU1043191A1 |
| Устройство для размотки коконов | 1987 |
|
SU1490168A1 |
| Распределитель питателя кокономотального автомата | 1982 |
|
SU1113435A1 |
Изобретение относится к текстильному машиностроению и может быть использовано в кокономотальном производстве. Цель изобретения - снижение отходов шелка-сырца - достигается за счет того, что подача коконов из накопителя растрасочной машины осуществляется по сигналу от каждой секции автомата. Коконы подаются только на нитезахваты работающей секции. При необходимости отключения секции прекращается подача коконов на нитезахваты, соответствующие данной секции, поэтому прекращается подача коконов в таз отключенной секции. Рациональная подача сырья исключает чрезмерное размягчение и растворение серицина. 2 з.п. ф-лы, 11 ил.
4L
16
15
Фиг2
r€K
6i
г SinO)
гад
L838VSI
3
Фиг. 6
9 Мф
iszew
I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
