где
Изобретение относится к области измерительной техники и может быть использовано для измерения вращательного и линейного перемещений объекта.
Целью изобретения является повышение точности за счет уменьшения числа промежуточных механических преобразований величины перемещений в сигнал, упрощение конструкции, a JQ также обеспечение возможности измерения не только линейных, но и угловых перемещений,
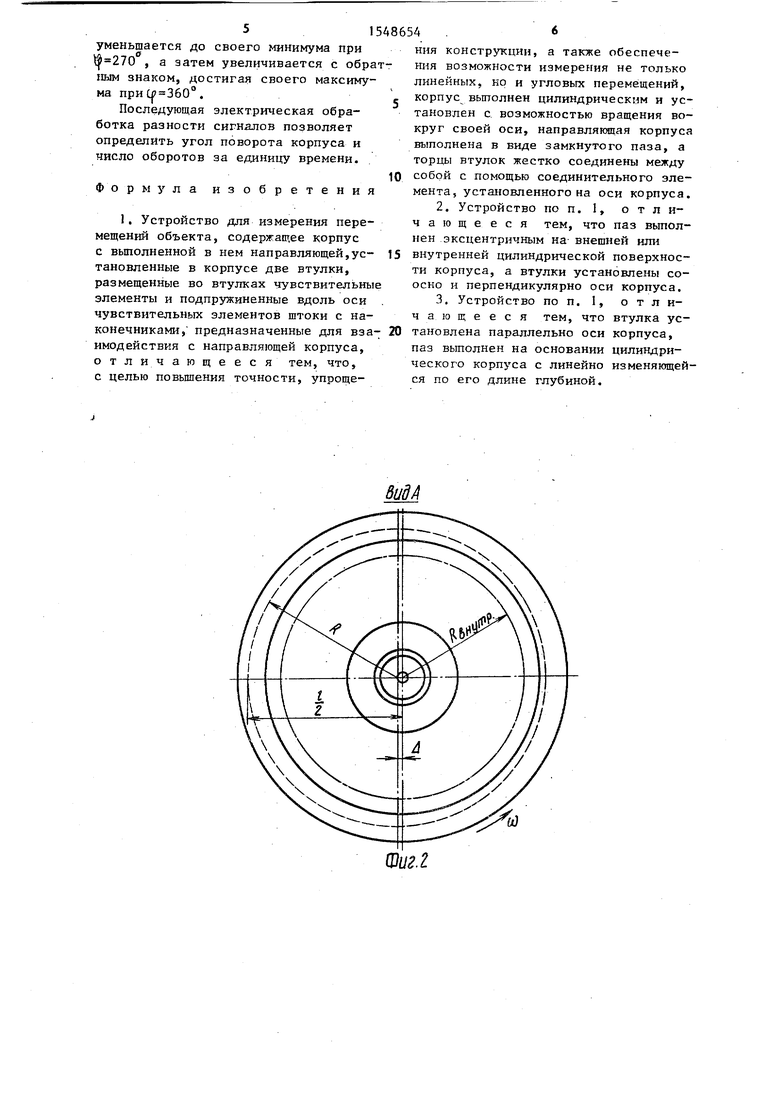
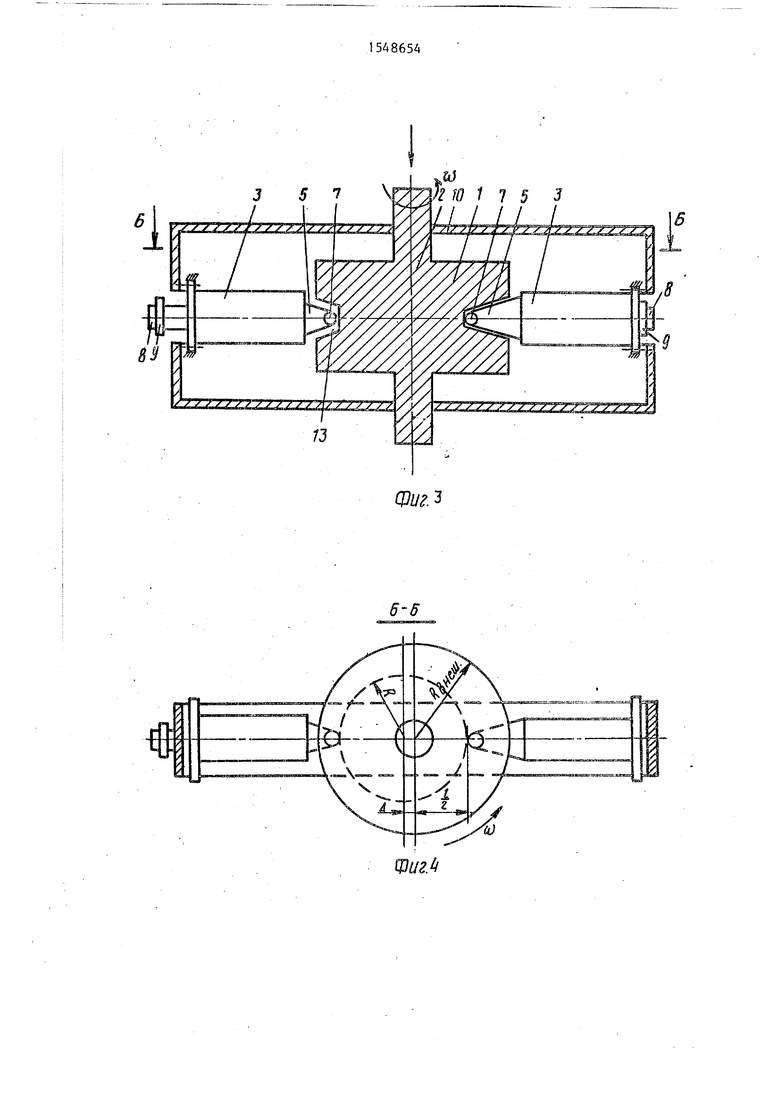
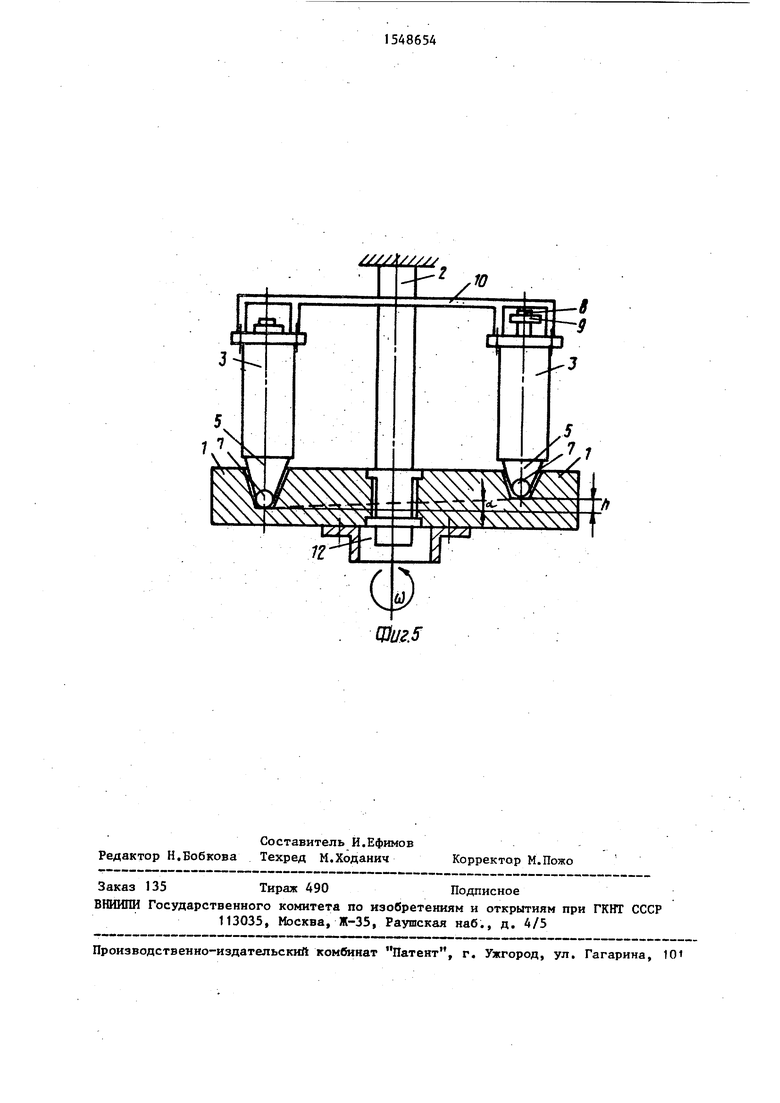
На фиг. 1 изображена конструктивная схема устройства с замкнутым па- 75 зом на внутренней боковой поверхности корпуса; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - конструктивная схема устройства с замкнутым пазом на внешней боковой поверхности; на 20 фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - конструктивная схема устройства с замкнутым пазом, на основании корпуса.
Устройство содержит цилиндричес- 25 кий корпус I, установленный на оси 2 с возможностью вращения вокруг нее. В корпусе 1 установлены две втулки 3, в которых размещены чувствительные
Л
-расстояниечмежду точками ков, предназначенных для имодействия с направляющи
-эксцентриситет паза; Ц,тр квнеш Радиус внутренней или
внешней цили-дрической по ности корпуса.
При выполнении корпуса 1 цилинд ческим паз 13 может быть выполнен основании корпуса 1 с линейно изме ющейся по его длине глубиной, опре ляемой из соотношения
oL arctg ,
где Ы - угон наклона паза;
h - разность наибольших значен глубины паза.
Втулки 3 установлены параллельн оси корпуса 1.
Использование фрикционной перед чи позволяет измерять с помощью пр лагаемого устройства линейные пере щения объекта.
Измерение перемещений осуществл ется следующим образом.
При размещении пьезоэлектрическ трансформаторов 4 в замкнутом пазу
элементы, например пьезоэлектрические зо , когда один из них находится в
трансформаторы 4 цилиндрической формы, и штоки 5, подпружиненные пружинами 6. На конусообразных наконечниках штоков 5 размещены шарики 7, Держатели 8 ступенчатого профиля продеты через отверстия во втулках 3 и ввинчены в штоки 5 и зафиксированы гайками 9 с возможностью продольного перемещения во втулках 3. Торцы втулок 3 жестко соединены между собой с помощью соединительного элемента 10, установленного на оси 2. Вращательное движение к корпусу 1 передается через прикрепленные к ее крышкам 11 муфты 12 сцепления.
Цилиндрический корпус 1 может иметь форму полого цилиндра или цилиндра с направляющей в виде замкнутого эксцентрического конусообразномаксимально , а другой в минимально подпружиненном состоянии, разность сигналов, снимаемых с обкладок пье электрических трансформаторов 4, имеет при этом положении максималь ное значение.
При повороте корпуса на некотор уголСр, например, против направлен вращения часовой стрелки давление пружины на первый пьезоэлектрическ трансформатор 4 уменьшается, а на второй- увеличивается.
В результате разность сигналов уменьшается и достигает своего мин 45 мума при (f 90°. При дальнейшем пов роте корпуса 1 в диапазоне 9(f(f& 1 давление пружины на псгрвый пьезоэле трический трансформатор 4 продолжа уменьшаться, а на второй - увеличи
40
548654
где
JQ7520
25 ,
Л
-расстояниечмежду точками штоков, предназначенных для взаимодействия с направляющими;
-эксцентриситет паза; Ц,тр квнеш Радиус внутренней или
внешней цили-дрической поверхности корпуса.
При выполнении корпуса 1 цилиндрическим паз 13 может быть выполнен на основании корпуса 1 с линейно изменяющейся по его длине глубиной, определяемой из соотношения
oL arctg ,
где Ы - угон наклона паза;
h - разность наибольших значений глубины паза.
Втулки 3 установлены параллельно оси корпуса 1.
Использование фрикционной передачи позволяет измерять с помощью предлагаемого устройства линейные перемещения объекта.
Измерение перемещений осуществляется следующим образом.
При размещении пьезоэлектрических трансформаторов 4 в замкнутом пазу
максимально , а другой в минимально подпружиненном состоянии, разность сигналов, снимаемых с обкладок пьезоэлектрических трансформаторов 4, имеет при этом положении максимальное значение.
При повороте корпуса на некоторый уголСр, например, против направления вращения часовой стрелки давление пружины на первый пьезоэлектрический трансформатор 4 уменьшается, а на второй- увеличивается.
В результате разность сигналов уменьшается и достигает своего мини- 5 мума при (f 90°. При дальнейшем повороте корпуса 1 в диапазоне 9(f(f& 180 давление пружины на псгрвый пьезоэлектрический трансформатор 4 продолжает уменьшаться, а на второй - увеличи0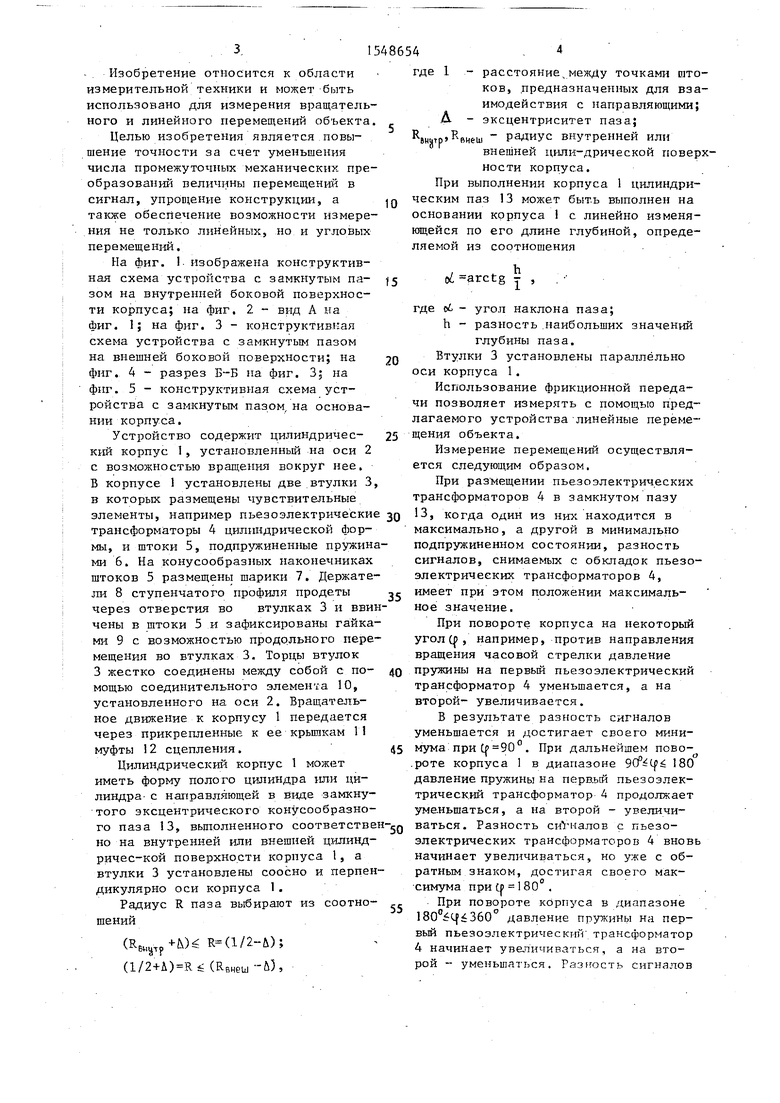
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения линейных перемещений объекта | 1986 |
|
SU1368627A1 |
| УЛЬТРАЗВУКОВОЙ ИНСТРУМЕНТ ДЛЯ ДЕФОРМАЦИОННОЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ И СВАРНЫХ СОЕДИНЕНИЙ | 2010 |
|
RU2540230C2 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Стенд для контроля технического состояния переднего моста транспортных средств | 1980 |
|
SU945714A1 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР С БЛОКОМ ЗАГЛУШКИ ПОСАДОЧНОГО ГНЕЗДА | 2011 |
|
RU2518033C2 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| Устройство для управления копировальным станком | 1980 |
|
SU921785A1 |
| УНИВЕРСАЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС ДЛЯ ТЕЛЕСКОПИЧЕСКОГО ПАТРОНА | 2018 |
|
RU2696949C2 |
| ОТКЛОНИТЕЛЬ РЕГУЛИРУЕМЫЙ | 2005 |
|
RU2303117C2 |
| Трансмиссия транспортного средства | 1989 |
|
SU1740203A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения вращательного и линейного перемещений объекта. Целью изобретения является повышение точности за счет уменьшения числа промежуточных механических преобразований величины перемещений в сигнал, упрощения конструкции,а также обеспечения возможности измерения не только линейных, но и угловых перемещений. Устройство содержит цилиндрический корпус 1, установленный с возможностью вращения вокруг оси 2 и выполненный на поверхности корпуса 1 эксцентрический паз 13, в котором установлены подпружиненные штоки 5, соединенные с пьезоэлектрическими трансформаторами 4. Втулки 3 жестко соединены между собой с помощью соединительного элемента 10. При вращении корпуса 1 давление пружин на пьезоэлектрические трансформаторы 4 изменяется за счет перемещения штоков 5 по глубине паза 13 и разность сигналов, снимаемых с пьезоэлектрических трансформаторов 4, периодически изменяется. Электрическая обработка разности сигналов позволяет определить угол поворота корпуса и число оборотов. 2 з.п. ф-лы, 5 ил.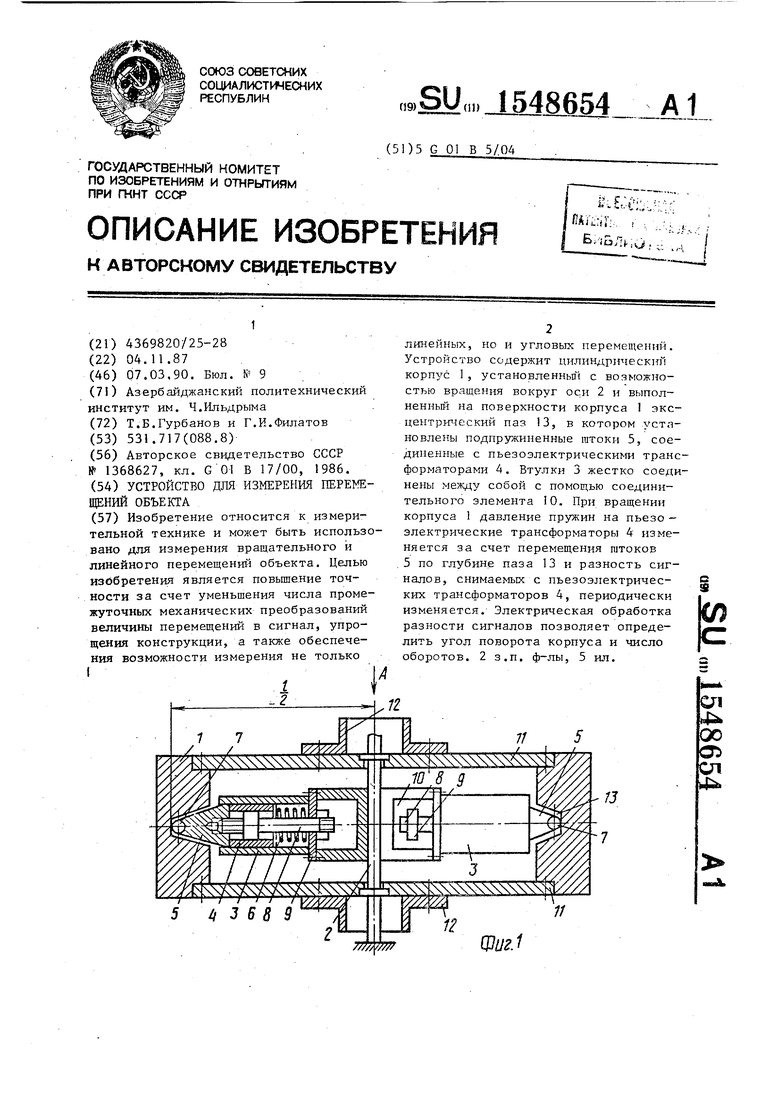
го паза 13, выполненного соответствен- ваться. Разность сигналов с пьезо- но на внутренней или внешней цилинд- электрических трансформаторов 4 вновь ричес-кой поверхности корпуса I, a втулки 3 установлены соосно и перпендикулярно оси корпуса 1.
Радиус R паза выбирают из соотно-
шений
BHijTp
(l/2+i)Rt (RBHeui
+Ш R-U/2-&);
-Ю,
начинает увеличиваться, но уже с обратным знаком, достигая своего максимума при (Р 180 .
При повороте корпуса в диапазоне 180°Јtf6360° давление пружины на первый пьезоэлектрический трансформатор 4 начинает увеличиваться, а на второй - уменьшаться. Газ кость сигналов
ваться. Разность сигналов с пьезо- электрических трансформаторов 4 внов
начинает увеличиваться, но уже с обратным знаком, достигая своего максимума при (Р 180 .
При повороте корпуса в диапазоне 180°Јtf6360° давление пружины на первый пьезоэлектрический трансформатор 4 начинает увеличиваться, а на второй - уменьшаться. Газ кость сигналов
уменьшается до своего минимума при о
270 , а затем увеличивается с обратным знаком, достигая своего максимума приС| Зб00.
Последующая электрическая обработка разности сигналов позволяет определить угол поворота корпуса и число оборотов за единицу времени.
Формула изобретения
ния конструкции, а также обеспечения возможности измерения не только линейных, но и угловых перемещений, корпус выполнен цилиндрическим и установлен с возможностью вращения вокруг своей оси, направляющая корпуса
выполнена в виде замкнутого паза, а торцы втулок жестко соединены между собой с помощью соединительного элемента, установленного на оси корпуса.
внутренней цилиндрической поверхности корпуса, а втулки установлены со- осно и перпендикулярно оси корпуса.
wui г
«5Г
r in
vC CO
ЧГ
in
ro
В
У/У/ЛУ/УУУ
| Устройство для измерения линейных перемещений объекта | 1986 |
|
SU1368627A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
