ел
Јь 00 00 ОО 1
Изобретение относится к электротехнике, в частности к управлению электроприводами по системе преобразователь частоты - двигатель и может быть использовано в электроприводах, требующих формирования экскаваторной механической характеристики.
Цель изобретения - повышение надежности путем ограничения тока статора при скачкообразном изменении нагрузки от уровня не ниже номинального,
На фиг. 1 изображена функциональная схема электропривода переменного тока; на фиг. 2 - задатчик интенсивности; на фиг. 3 - временные диаграммы работы электропривода при скачкообразном изменении нагрузки.
Электропривод переменного тока содержит асинхронный электродвигатель , подключенный к преобразователю 2 частоты с блоком 3 управления, имеющим раздельные каналы 4 и 5 регулирования частоты и напряжения, подключенные выходами к вентильной час- ти 6 преобразователя 2. Входы каналов 4 и 5 регулирования частоты и напряжения через регулятор 7 частоты и на- пряжения соединены с задатчиком 8 интенсивности, первый вход которого подключен к выходу сумматора 9, датчики напряжения 10 и тока 11 двигателя выходами подключены к датчику 12 коэффициента мощности двигателя. Пороговый элемент 13 выходом подключен к управляющим входам первого 14 и второго 15 ключевых элементов, вход ключевого элемента 14 подключен к выходу элемента 16 задания обратной связи, а выход соединен с одним входом сумматора 9. Второй сумматор 17, одним входом соединен с выходом датчика коэффициента мощности двигателя 12, а другой его вход соединен с задатчиком 18 предельного значения коэффициента мощности двигателя. Выход второго сумматора 17 соединен с входом порогового элемента 13 и входом второго ключевого элемента 15, выход которого подключен к второму входу задатчика 8 интенсивности.
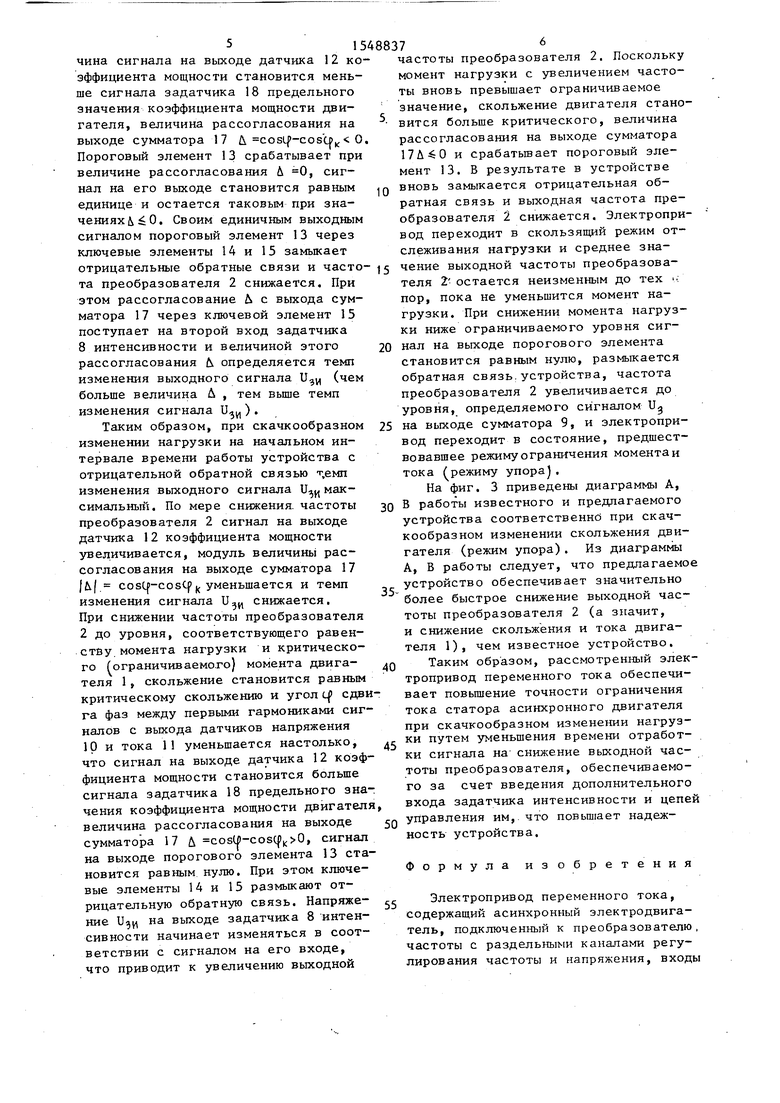
Задатчик 8 интенсивности частоты вращения двигателя состоит из последовательно соединенных компаратора 19 (фиг. 2), усилителя 20 с регулируемым коэффициентом усиления и интегратора 21, при этом выход интегра0
5
0
5
тора 21 образует выход задатчика Ь интенсивности и соединен с вторым входом компаратора 19, первый вход которого является первым входом задатчика 8 интенсивности.
Электропривод переменного тока работает следующим образом.
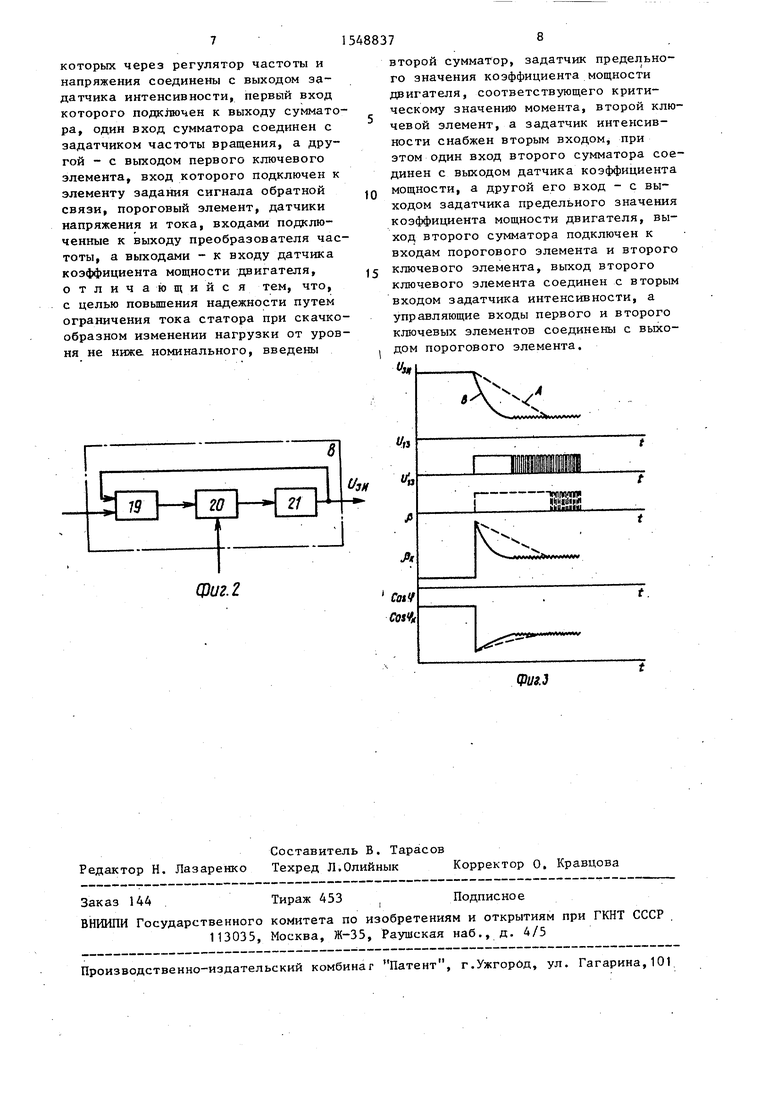
На вход сумматора 9 подается сигнал Uj задания частоты вращения электродвигателя 1. С его выхода сигнал поступает на первый вход задатчика интенсивности частоты вращения двигателя. Второй вход задатчика 8 интенсивности (вход управления усилителя 20 с регулируемым коэффициентом усиления) служит для воздействия на темп изменения выходного сигнала U.u задатчика 8 интенсивности. Чем больше по абсолютному значению величина сигнала на втором входе задатчика 8 интенсивности, тем выше темп изменения выходного сигнала (фиг. 3) .
При колебаниях нагрузки, не превышающих максимального момента электродвигателя 1, обратная связь устройства разомкнута (разомкнуты ключевые элементы 14 и 15), поскольку выходной сигнал датчика 12 коэффициента мощности, пропорциональный разности фаз первых гармоник входных сигналов от датчиков напряжения 10 и тока 11, больше выходного сигнала s cos задатчика 18 предельного значения коэффициента мощности двигателя (сигнал cos If к соответствует разности фаз между первыми гармоническими составляющими сигналов напряжения и тока при моменте двигателя,равном критическому моменту). Величина рассогласования Д costf-cos4) на выходе сумматора 17 больше нуля и выходной сигнал порогового элемента 13 ра- 5 вен 0, где coslf- коэффициент мощности двигателя.
При увеличении нагрузки на валу электродвигателя 1 выше номинальной увеличивается угол q сдвига фаз между первыми гармониками сигналов с выхода датчиков напряжения 10 и тока 11, поступающими на входы датчика 12 коэффициента мощности, который осуществляет преобразование фаза-амплитуда. При повышении нагрузки над максимальным моментом электродвигателя 1 по прохождении рабочей координатной точки критического скольжения его механической характеристики вели0
0
0
5
чина сигнала на выходе датчика 12 коэффициента мощности становится меньше сигнала задатчика 18 предельного значения коэффициента мощности двигателя, величина рассогласования на выходе сумматора 17 u c.os(j-cos (jK О. Пороговый элемент 13 срабатывает при величине рассогласования Л 0, сигнал на его выходе становится равным единице и остается таковым при значениях & 0. Своим единичным выходным сигналом пороговый элемент 13 через ключевые элементы 14 и 15 замыкает
48837
10
частоты преобразователя 2. Поскольку момент нагрузки с увеличением частоты вновь превышает ограничиваемое значение, скольжение двигателя становится больше критического, величина рассогласования на выходе сумматора и срабатывает пороговый элемент 13. В результате в устройстве вновь замыкается отрицательная обратная связь и выходная частота преобразователя 2 снижается. Электропривод переходит в скользящий режим отслеживания нагрузки и среднее зна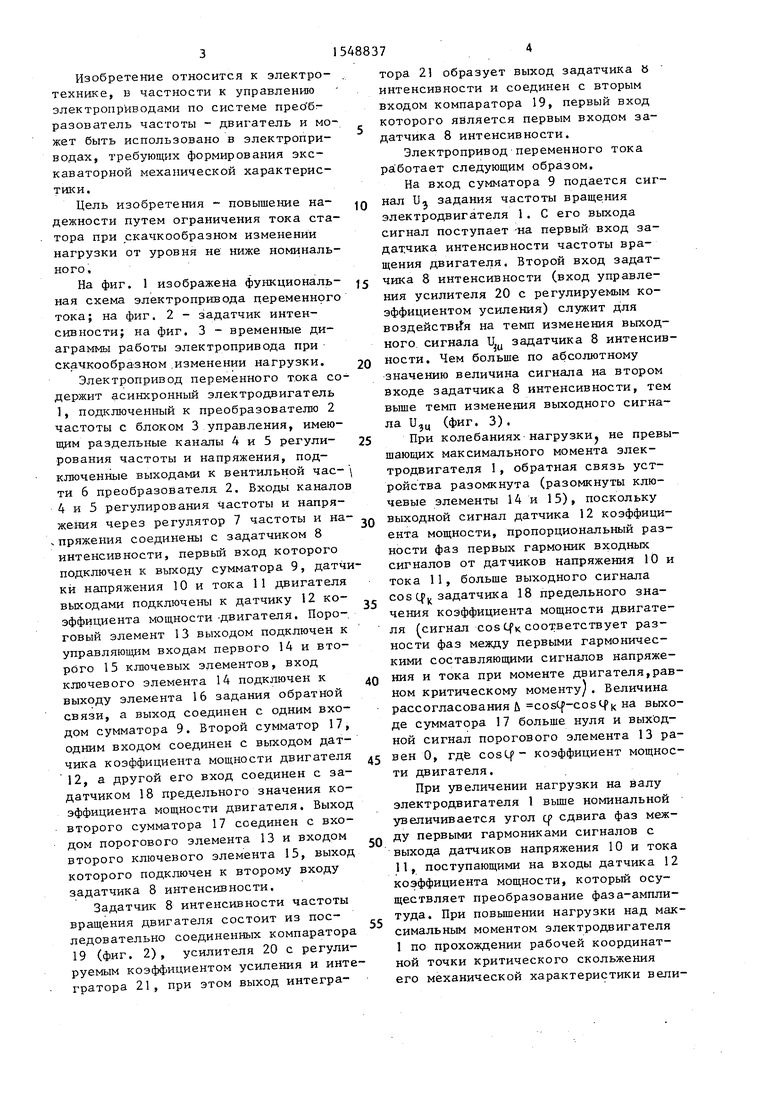
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1251280A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда | 1983 |
|
SU1150312A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
Изобретение относится к электротехнике. Цель изобретения - повышение надежности путем ограничения тока статора при скачкообразном изменении нагрузки от уровня ниже номинального. Электропривод переменного тока содержит асинхронный двигатель 1, преобразователь 2 частоты, задатчик 8 интенсивности, который снабжен вторым входом, блок 12 измерения коэффициента мощности, задатчик 18 коэффициента мощности при критическом скольжении. Дискретное увеличение нагрузки от номинального уровня, превышающее по величине критическое значение момента, приводит к снижению коэффициента мощности ниже заданного в задатчике 18. Это приводит к замыканию ключей 14 и 15, и быстрому снижению частоты, что ограничивает ток. 3 ил.
отрицательные обратные связи и часто- щ чение выходной частоты преобразова- та преобразователя 2 снижается. При этом рассогласование Д с выхода сумматора 17 через ключевой элемент 15 поступает на второй вход задатчика 8 интенсивности и величиной этого рассогласования & определяется темп изменения выходного сигнала изи (чем больше величина Д , тем выше темп
20
теля 2 остается неизменным до тех пор, пока не уменьшится момент нагрузки. При снижении момента нагрузки ниже ограничиваемого уровня сигнал на выходе порогового элемента становится равным нулю, размыкается обратная связь устройства, частота преобразователя 2 увеличивается до уровня, определяемого сигналом U
изменения сигнала ).
Таким образом, при скачкообразном изменении нагрузки на начальном интервале времени работы устройства с отрицательной обратной связью темп изменения выходного сигнала максимальный. По мере снижения частоты преобразователя 2 сигнал на выходе датчика 12 коэффициента мощности увеличивается, модуль величины рассогласования на выходе сумматора 17 |k| costji-cosCp| уменьшается и темп изменения сигнала снижается. При снижении частоты преобразователя 2 до уровня, соответствующего равенству момента нагрузки и критического (ограничиваемого) момента двигателя 1, скольжение становится равным критическому скольжению и угол | сдвига фаз между первыми гармониками сигналов с выхода датчиков напряжения 10 и тока 11 уменьшается настолько, что сигнал на выходе датчика 12 коэффициента мощности становится больше сигнала задатчика 18 предельного значения коэффициента мощности двигател величина рассогласования на выходе сумматора 17 Д cos(| -cosq K 0, сигнал на выходе порогового элемента 13 становится равным нулю. При этом ключевые элементы 14 и 15 размыкают отрицательную обратную связь. Напряжение на выходе задатчика 8 интенсивности начинает изменяться в соответствии с сигналом на его входе, что приводит к увеличению выходной
чение выходной частоты преобразова-
теля 2 остается неизменным до тех пор, пока не уменьшится момент нагрузки. При снижении момента нагрузки ниже ограничиваемого уровня сигнал на выходе порогового элемента становится равным нулю, размыкается обратная связь устройства, частота преобразователя 2 увеличивается до уровня, определяемого сигналом U
на выходе сумматора 9, и электропривод переходит в состояние, предшествовавшее режимуограничения момента и тока режиму упора) .
На фиг. 3 приведены диаграммы А,
В работы известного и предлагаемого устройства соответственно при скачкообразном изменении скольжения двигателя (режим упора), Из диаграммы А, В работы следует, что предлагаемое устройство обеспечивает значительно более быстрое снижение выходной частоты преобразователя 2 (а значит, и снижение скольжения и тока двигателя 1), чем известное устройство.
Таким образом, рассмотренный электропривод переменного тока обеспечивает повышение точности ограничения тока статора асинхронного двигателя при скачкообразном изменении нагрузки путем уменьшения времени отработки сигнала на снижение выходной частоты преобразователя, обеспечиваемого за счет введения дополнительного входа задатчика интенсивности и цепей
управления им, что повышает надежность устройства.
Формула изобретения
Электропривод переменного тока, содержащий асинхронный электродвигатель, подключенный к преобразователю, частоты с раздельными каналами регулирования частоты и напряжения, входы
которых через регулятор частоты и напряжения соединены с выходом эа- датчика интенсивности, первый вход которого подключен к выходу сумматора, один вход сумматора соединен с эадатчиком частоты вращения, а другой - с выходом первого ключевого элемента, вход которого подключен к элементу задания сигнала обратной связи, пороговый элемент, датчики напряжения и тока, входами подключенные к выходу преобразователя частоты, а выходами - к входу датчика коэффициента мощности двигателя, отличающийся тем, что, с целью повышения надежности путем ограничения тока статора при скачкообразном изменении нагрузки от уровня не ниже номинального, введены
Фиг. 2
второй сумматор, задатчик предельного значения коэффициента мощности двигателя, соответствующего критическому значению момента, второй ключевой элемент, а задатчик интенсивности снабжен вторым входом, при этом один вход второго сумматора соединен с выходом датчика коэффициента мощности, а другой его вход - с выходом задатчика предельного значения коэффициента мощности двигателя, выход второго сумматора подключен к входам порогового элемента и второго ключевого элемента, выход второго ключевого элемента соединен с вторым входом задатчика интенсивности, а управляющие входы первого и второго ключевых элементов соединены с выходом порогового элемента.
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1282302A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотнорегулируемый электропривод | 1985 |
|
SU1292156A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1984 |
|
SU1251280A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
