112
Изобретение относится к электро- технике и может быть использовано для построения систем управления асинхронными электроприводами с вентильными преобразователями частоты.
Цель изобрете11ия - повышение быстродействия и надежности за счет по- вьшения помехозащищенности и точности отработки управляющих сигналов в динамике,
На чертеже представлена блок-схема частотно-регулируемого электропривода.
Частотно-регулируемый электропривод содержит асинхронный двигатель 1, подключенный через инвертор 2 к управляемому выпрямителю 3, соединенному с регулятором 4 тока. Задающий вход регулятора 4 тока соединен через функциональный преобразователь 5 сигнала задания момента в сигнал задания модуля вектора тока статора с выходом регулятора 6 скорости. Вход обратной связи регулятора 6 скорости соединен с датчиком 7 частоты вращения, а выход регулятора скорости - с входом функционального преобразователя 8 сигнала задания момента в сигнал задания угла между вектором тока статора и потокосцепления ротора. Вход обратной связи регулятора 4 тока подключен к датчику 9 тока. Электропривод содержит также систему 10 управления инвертором 2, сумматор 11
выход которого подключен к системе
10управления. Первый вход сумматора
11соединен с датчиком 7 частоты вращения .
I
В электропривод введены датчик 12 фазового угла, регулятор 13 угла, функциональный преобразователь 14 фазового угла между током и напряжением статора асинхронного двигателя 1 в угол между векторами тока статора и потокосцепления ротора, функциональный преобразователь 15 сигнала задания момента в сигнал задания скольжения. Выход регулятора 13 угла соединен с вторым входом сумматора 11, а задающий вход регулятора I3 угла - с функциональным преобразователем 8. Вход обратной связи регулятора 13 угла соединен через функциональный преобразователь 14 с датчи- ком 12 фазового угла. Третий вход сумматора 11 связан через функциональный преобразователь 15 с выходом регулятора скорости.
5
0
0
5
0
35
о CQ ее
562
Регулятор угла реализует пропорциональную функцию и может быть, например, синтезирован методом модального управления на основе разделения движений в асинхронном электроприводе и линеаризации уравнений для электромагнитных процессов.
Датчик фазового угла осуществляет преобразование многофазной системы токов и напряжений в векторные величины и измерения угла между векторами поля и напряжения.
Электропривод работает следующим образом.
На вход регулятора 6 скорости поступают два сигнала - сигнал задания частоты вращения и обратной связи по частоте вращения с датчика 7 частоты вращения. Выходной сигнал регулятора скорости пропорционален заданному значению частоты скольжения ротора AuJ- Этот сигнал поступает на входы трех функциональных преобразователей. Первый функциональный преобразователь 5 формирует сигнал задания контура регулирования тока, который поступает на вход регулятора 4 тока. Сигнал обратной связи по току посту- пает с датчика 9 тока и подается на . вход обратной связи регулятора тока, .выходной сигнал которого управляет вьтрямителем 3. Сигнал с выхода регулятора 6 скорости задает опорное значение абсолютного скольжения в функции требуемого момента электропривода посредством второго функционального преобразователя. После суммирования сигнала скольжения аи) с сигналом обратной связи по частоте вращения, поступающим с датчика 7 частоты вращения, результирующий сигнал определяет частоту инвертора и поступает в систему 10 управления инвентором. Настройка функциональных преобразователей 5 и 15 определяется выбранным законом частотного управления , I
Для повышения быстродействия в динамических режимах в системе дополнительно вырабатывается сигнал коррекции скольжения лиЗ , ускоряющий перевод вектора тока статора в новое положение, соответствующее требуемому значению электромагнитного момента асинхронной машины. Корректирующий сигнал uuJ поступает на третий вход сумматора II, где складывается с сигналом опорного сколь312
жения дч) . При этом опорное скольжение диЗ характериз ует значение скольжения в установившемся режиме с заданным моментом, а корректируто- щий сигнал скольжения учитывает электромагнитную инерцию асинхронной машины и обеспечивает необходимую форсировку по частоте.
Сигнал коррекции скольжения вырабатывается регулятором 13 угла между вектором тока статора i и потоко- сцеплением ротора в функции рассогласования заданного значения и действительного значений угла в . Информацию об угле в можно получить, используя датчик фазового угла. Связь сигнала, -характеризующего угол©, с ;измеренным фазовым углом f осущест- (вляется с помощью четвертого функционального преобразователя 14. Сиг- нал, пропорциональный углу б, поступает на вход обратной связи регулятора 13 угла. Сигнал задания по углу. 6 поступает с регулятора 6 скорости
через функциональный преобразователь
.-
8, { соторый реализует зависимость угла в от электромагнитного момента машины, соответствующую выбранному закону частотного управления.
Так как датчик 12 фазового угла позволяет получить информацию о те кущих мгновенных значениях угла ч в реальном темпе протекания электро,магнитных переходных процессов, система регулирования угла 9 , включаю- щая регулятор угла 9 , датчик фазового угла и функциональный преобразователь 8, при соответствующей настройке регулятора обеспечивает повышенное быстродействие и высокую динамическую точность регулирования аргумента вектора тока статора - угла 9 , а следовательно, и момента двигателя. Причем это достигается без применения дифференцирующих звеньев, что существенно повышает помехазащи- щенность системы.
Кроме того, система регулирования угла б обеспечивает повьш1енную точ- ность регулирования момента и потоко сцепления в установившемся режиме, что позволяет снизить требования к точности измерения частоты вращения.
Таким образом, применение в пред- лагаемом электроприводе датчика фазового угла, регулятора угла и функциональных преобразователей повышает
2921
5
JO 5ь 20 .
25
40
35
-
5
564
его динамическую точность и помеха- защищенность.
Форм у л а изобретения
Частотно-регулируемый электропривод, содержащий асинхронный двигатель, подключенный через инвертор к управляемому выпрямителю, соединенному с регулятором тока, задающий вход которого соединен через функциональный преобразователь сигнала задания момента в сигнал задания модуля вектора тока статора с выходом регулятора скорости, вход обратной связи которого соединен с датчиком частоты вращения, а выход - с входом функционального преобразователя сигнала задания момента в сигнал задания угла между векторами тока статора и потокосцепления ротора, вход обратной связи регулятора тока подключен к датчику тока, систему управления инвертором, связанную с выходом сумматора, первый вход которой соединен с датчиком частоты вращения, отличающийся тем, что, с целью повьш1ения быстродействия и надежности за счет повьшения помехозащищенности и точности отработки управляющих сигналов в динамике, введены датчик фазового угла, регулятор угла, функциональный преобразователь фазового угла между током и напряжением статора асинхронного двигателя в угол между векторами тока статора и потокосцепления ротора, функциональный преобразователь сигнала задания момента в сигнал задания скольжения, причем второй вход сумматора соединен с выходом регулятора угла, задающий вход которого соединен с функциональным преобразователем сигнала задания момента в сигнал задания угла между векторами тока статора и потокосцепления ротора, вход обратной связи регулятора угла соединен через функциональный преобразователь фазового угла между током и напряжением статора асинхронного двигателя в угол между векторами тока статора и потокосцепления ротора с датчиком фазового угла, а третий вход сумматора через функциональный преобразователь сигнала задания момента в сигнал задания скольжения подключен к выходу регулятора скорости.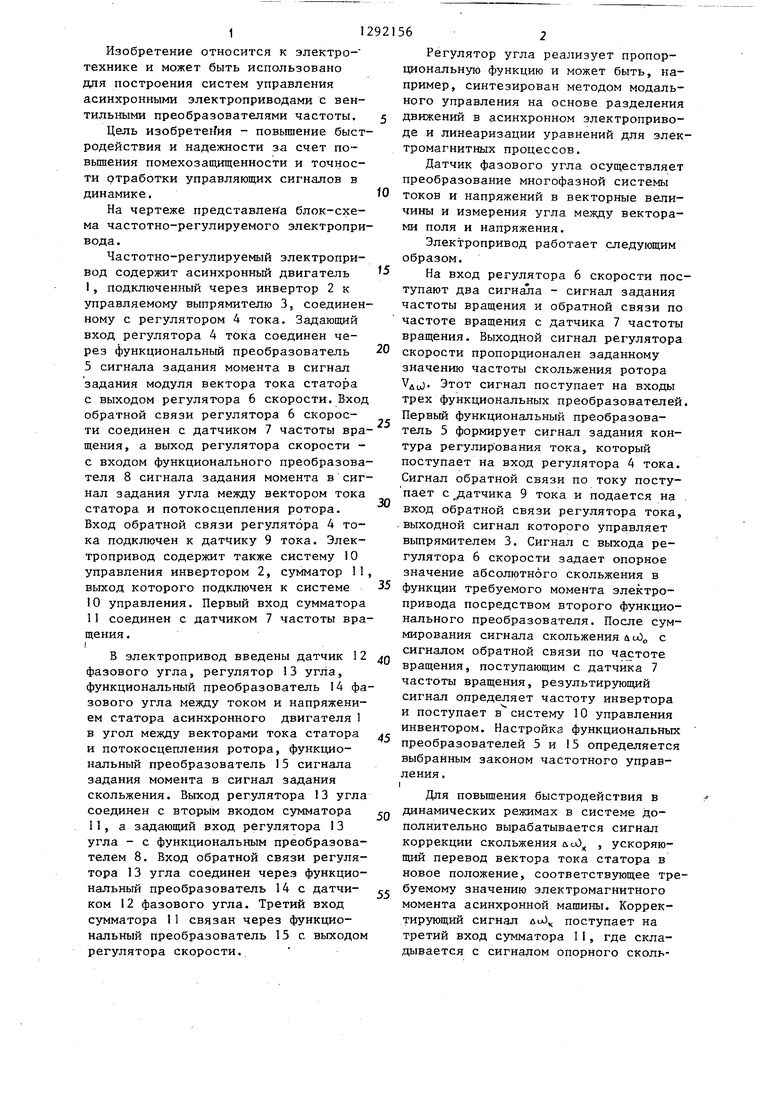
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1379932A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Устройство для частотного управления асинхронным электроприводом | 1980 |
|
SU907751A1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
Изобретение относится к электротехнике и может быть использовано для построения систем управления асинхронными электроприводами. Система управления 10 позволяет повысить помехозащищенность и точность регулирования за счет измерения угла между вектором тока статора и пото- косцепления ротора. Это достигается за счет дополнительного введения в частотно-регулируемый электропривод датчика фазового угла 12, двух функциональных преобразователей 14, 15 и регулятора угла 13. Дополнительно вырабатывается сигнал коррекции скольжения ди) , ускоряющий перевод вектора тока статора в новое положение, соответствующее требуемому значению электромагнитного момента асинхронной машины. 1 ил. (О (Л 1чЭ со го ел оэ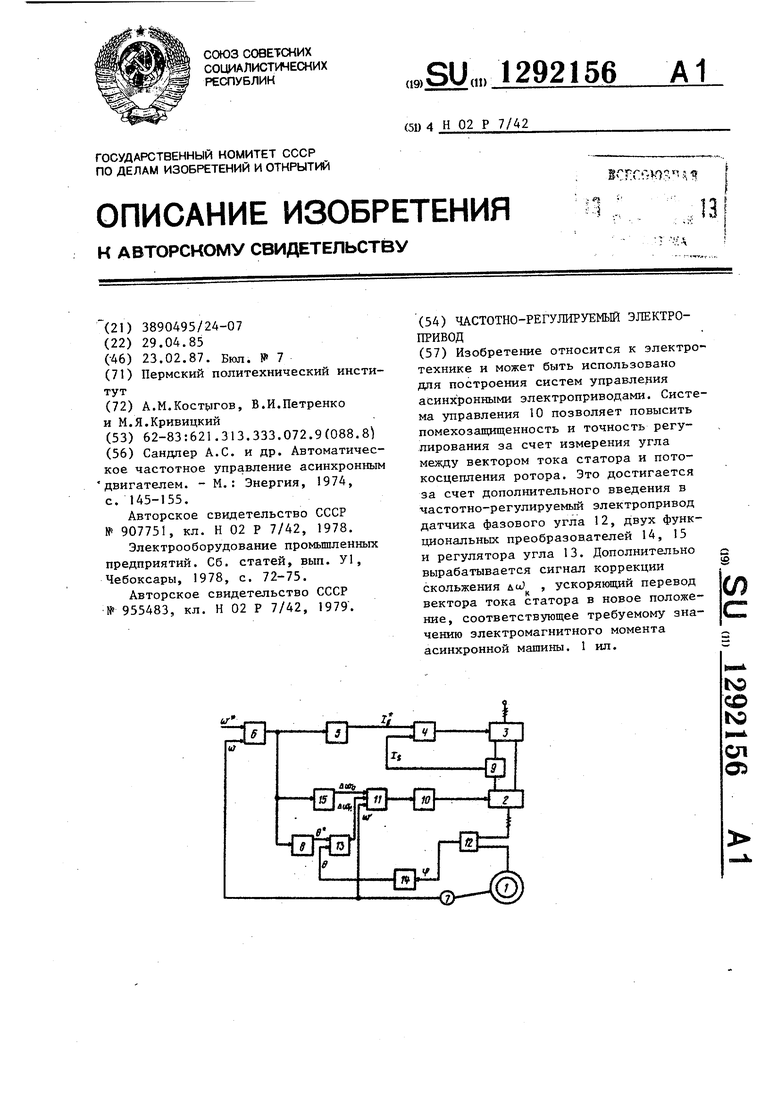
| Сандпер А.С | |||
| и др | |||
| Автоматическое частотное управление асинхронным двигателем | |||
| - М.: Энергия, 1974, с | |||
| Заслонка для русской печи | 1919 |
|
SU145A1 |
| Устройство для частотного управления асинхронным электроприводом | 1980 |
|
SU907751A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрооборудование промьшленных предприятий | |||
| Сб | |||
| статей, вып | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
