Изобретение относится к технике автоматического управления транспортными средствами и может быть использовано для автоматического вождения напольного транспорта в составе гибких автоматизированных производств, а также может быть применено на таких транспортных средствах, в которых ведущая часть состоит из двух самостоятельных ведущих колес, расположенных по правому и левому бортам, а рулевое управление осуществляется в соответствии с разностью скоростей двух ведущих колес.
Цель данного изобретения - повышение точности системы.
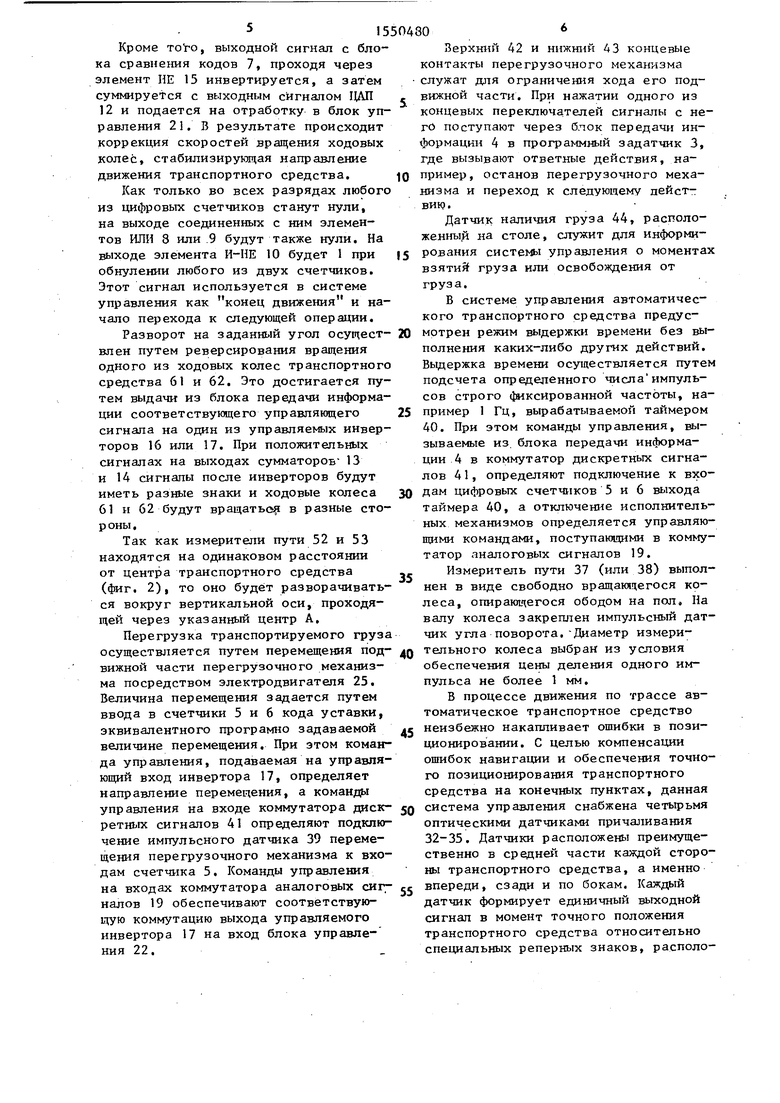
На фиг. 1 представлена функциональная схема системл управления транспортным средством; на фиг. 2 - относительное расположение измерителей пути и приводов ходовых колес на раме транспортного средства.
Система управления транспортного средства содержит соединитель связи
с цеховой ЭВМ 1, блок дальней связи с цеховой ЭВМ 2, программный задат- чик 3, блок передачи информации 4, цифровые счетчики 5 и 6, блок сравнения кодов 7, два элемента ИЛИ 8 и 9, элемент И-ИЕ 10, два цифроаналоговых преобразователей 11 и 12, сумматоры 13 и 14, элемент НЕ 15, управляемые инверторы 16 и 17, пульт ручного управления 18, коммутатор аналоговых сигналов 19, три блока управления 20 - 22, электродвигатели приводов ходовых колес 23 и 24, электродвигатель перегрузочного механизма 25, та- хогенераторы 26 - 28, усилитель мощности 29, две электромагнитные тормозные муфты 30 и 31 приводов ходовых колес, четыре датчика причаливания 32-35, элемент 2И - ИЛИ 36, два измерителя пути 37 и 38, датчик 39 перемещений перегрузочного механизма, таймер 40, коммутатор дискретных сигналов 41, концевые контакты 42 и 43 перегрузочного механизма, датчик 44 наличия груза на столе транспортного средства, датчик 45 обнаружения препятствий, формирователь сигналов 46, устройства световой 47 и звуковой 48 сигнализации, аварийный бампер 49, информационные и управляющие шины 50, кодовый выход 51 блока передачи информации.
На фиг. 2 представлено относительное расположение измерителей пути 52 и 53 и приводов ходовых колес 54 и 55 на раме транспортного средства 56. Кроме того, указано расположение четырех флюгерных опорных колес 57-60, левое 61 и правое 62 ходовые колеса, А - геометрический центр транспортного средства, 0-0 - линия, проходящая через оси ходовых колес.
Система управления транспортным средством работает следующим образом.
В начале транспортное средство установлено на исходной позиции в строго определенном положении в азимуте. От внешнего управляющего устройства, например, от цеховой ЭВМ, через соединитель связи 1, через блок дальней связи 2 в программный задатчик 3 вводится программа движения по требуемому маршруту.
Перед началом каждого прямолинейного движения из программного задат- чика 3 через блок передачи информации 4 в цифровые счетчики 5 и 6 вводят одинаковый код уставки, эквивалентный программно-задаваемой величине перемещения по прямой. К выходу каждого цифрового счетчика подключены цифроаналоговые преобразователи 11 и 12 с нелинейной характеристикой на выходе типа насыщение. Если величина уставки на цифровых счетчиках имеет большую величину, на выходе
цифроаналоговых преобразователей будет максимальное напряжение. Это напряжение подается через управляемые инверторы 16 и 17, через коммутатор аналоговых сигналов 19 на входы бло5 к°в управления электроприводами ходовых колес и тем самым задает максимальную скорость движения транспортного средства. По мере движения транспортного средства измерители пути 37
о и 38 вырабатывают импульсы, число которых пропорционально пройденному пути. Эти импульсы поступают через коммутатор дискретных сигналов 41 на вычитающие входы соответствующего циф5 рового счетчика 5 или 6. В результате, величины уставок в каждом счетчике уменьшаются пропорционально пройденному пути, Если код уставки на любом из цифровых счетчиков становится меньше некоторой предельной величины, приводящей пифроаналоговые преобразователи 11 и 12 в насыщение, то с этого момента выходное напряжение данного цифрозналогового преобразователя (ЦАП) уменьшается пропорционально коду на счетчике, что приводит к постепенному уменьшению скорости движения транспортного средства. I
На фиг. 2 представлено относительное расположение измерителей 52 и 53 относительно ходовых колес 54 и 55 на раме транспортного средства. Так как измерители пути расположены по разные стороны от продольной оси транспортного средства, но на одинаковом расстоянии от нее, то в гроцес- се движения транспортного средства пути, проходимые правым и левым измерителями, могут различаться, что обнаруживается схемой сравнения кодов 7, причем, если на первом счетчике код больше (меньше), чем на втором счетчике, то схема сравнения кодов формирует на выходе логический сигнал 5 О (1). Этот сигнал суммируется на сумматоре аналоговых сигналов 13 с выходным сигналом ЦАП 11 и подается на отработку в блок управления 20.
0
5
0
5
0
Кроме того, выходной сигнал с блока сравнения кодов 7, проходя через элемент НЕ 15 инвертируется, а затем суммируется с выходным сигналом ЦЛП 12 и подается на отработку в блок уп- равления 21. В результате происходит коррекция скоростей вращения ходовых колес, стабилизирующая направление движения транспортного средства.
Как только во всех разрядах любого из цифровых счетчиков станут нули, на выходе соединенных с ним элементов ИЛИ 8 или 9 будут также нули. На выходе элемента И-НЕ 10 будет 1 при обнулении любого из двух счетчиков. Этот сигнал используется в системе управления как конец движения и начало перехода к следующей операции.
Верхний 42 и нижний 43 концевые контакты перегрузочного механизма служат для ограничения хода его подвижной части. При нажатии одного из концевых переключателей сигналы с него поступают через бток передачи информации 4 в программный задатчик 3, где вызывают ответные действия, например, останов перегрузочного механизма и переход к следующему действию.
Датчик наличия груза 44, расположенный на столе, служит для информирования системы управления о момента взятий груза или освобождения от груза.
В системе управления автоматического транспортного средства предус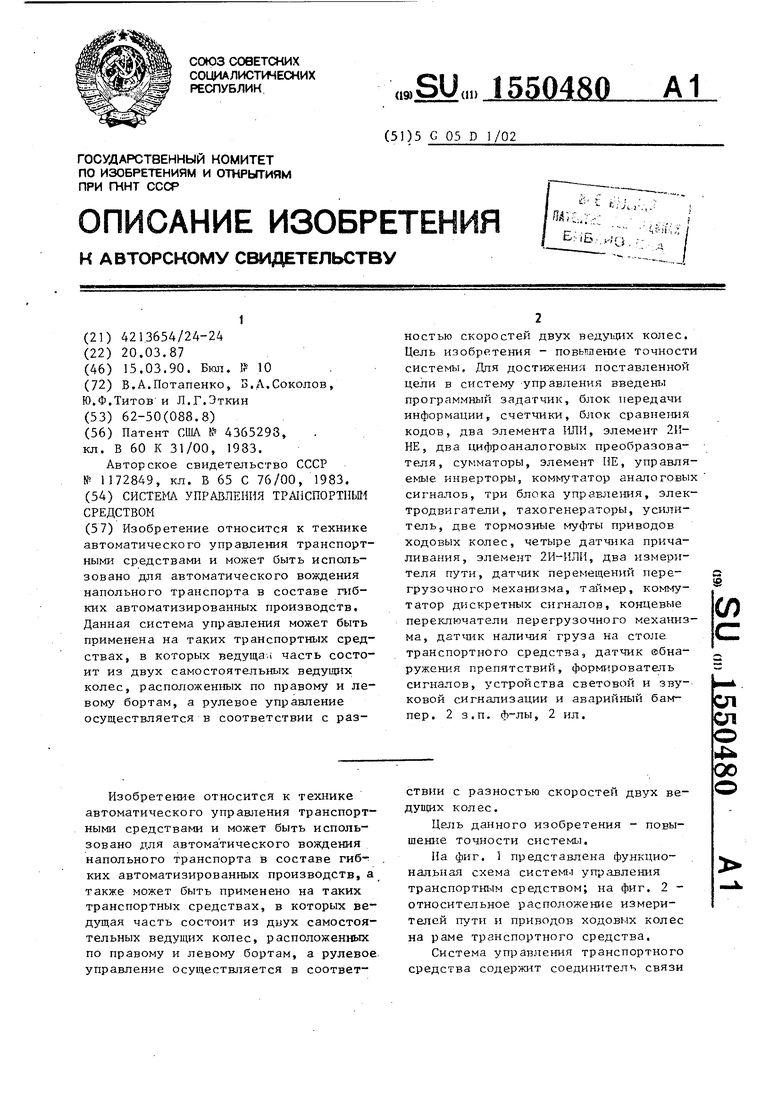


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2081232C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Система управления стендом для диагностирования технического состояния транспортных средств | 1988 |
|
SU1553875A1 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| Устройство для контроля работы транспортных средств | 1986 |
|
SU1446638A1 |
| УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОГО КОНТРОЛЯ РЕЛЬСОВОГО ПУТИ ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2242553C2 |
| Устройство для контроля температуры | 1986 |
|
SU1410059A1 |


Изобретение относится к технике автоматического управления транспортными средствами и может быть использовано для автоматического вождения напольного транспорта в составе гибких автоматизированных производств. Данная система управления может быть применена на таких транспортных средствах, в которых ведущая часть состоит из двух самостоятельных ведущих колес, расположенных по правому и левому бортам, а рулевое управление осуществляется в соответствии с разностью скоростей двух ведущих колес. Цель изобретения - повышение точности системы. Для достижения поставленной цели в систему управления введены программный задатчик, блок передачи информации, счетчики, блок сравнения кодов, два элемента ИЛИ, элемент 2И-НЕ, два цифроаналоговых преобразователя, сумматоры, элемент НЕ, управляемые инверторы, коммутатор аналоговых сигналов, три блока управления, электродвигатели, тахогенераторы, усилитель, две тормозные муфты приводов ходовых колес, четыре датчика причаливания, элемент 2И-ИЛИ, два измерителя пути, датчик перемещений перегрузочного механизма, таймер, коммутатор дискретных сигналов, концевые переключатели перегрузочного механизма, датчик наличия груза на столе транспортного средства, датчик обнаружения препятствий, формирователь сигналов, устройства световой и звуковой сигнализации и аварийный бампер. 2 з.п. ф-лы, 2 ил.
Разворот на заданный угол осущест- 20 мотрен режим выдержки времени без вывлен путем реверсирования вращения одного из ходовых колес транспортного средства 61 и 62. Это достигается путем выдачи из блока передачи информации соответствующего управляющего сигнала на один из управляемых инверторов 16 или 17. При положительных сигналах на выходах сумматоров1 13 и 14 сигналы после инверторов будут иметь разные знаки и ходовые колеса 61 и 62 будут вращаться в разные сто- р оны.
Так как измерители пути 52 и 53 находятся на одинаковом расстоянии от центра транспортного средства (фиг. 2), то оно будет разворачиваться вокруг вертикальной оси, проходящей через указанный центр А.
Перегрузка транспортируемого груза
осуществляется путем перемещения под- до тельного колеса выбран из условия вижной части перегрузочного механизма посредством электродвигателя 25, Величина перемещения задается путем ввода в счетчики 5 и б кода уставки, эквивалентного програмно задаваемой д величине перемещения. При этом команда управления, подаваемая на управляющий вход инвертора 17, определяет направление перемещения, а команды управления на входе коммутатора диск- JQ ретных сигналов 41 определяют подключение импульсного датчика 39 перемещения перегрузочного механизма к входам счетчика 5. Команды управления
обеспечения цены деления одного им пульса не более 1 мм.
В процессе движения по трассе а томатическое транспортное средство неизбежно накапливает ошибки в поз ционировании. С целью компенсации ошибок навигации и обеспечения точ го позиционирования транспортного средства на конечных пунктах, данн система управления снабжена четырь оптическими датчиками причаливания 32-35. Датчики расположены преимущ ственно в средней части каждой сто ны транспортного средства, а именн
на входах коммутатора аналоговых сиг- ее впереди, сзади и по бокам. Каждый
налов 19 обеспечивают соответствующую коммутацию выхода управляемого инвертора 17 на вход блока управления 22.
датчик формирует единичный выходно сигнал в момент точного положения транспортного средства относительн специальных реперных знаков, распо
5
0
5
полнения каких-либо других действий. Выдержка времени осуществляется путем подсчета определенного числа импульсов строго фиксированной частоты, например 1 Гц, вырабатываемой таймером 40. При этом команды управления, вызываемые из блока передачи информации 4 в коммутатор дискретных сигналов 41, определяют подключение к входам цифровых счетчиков 5 и 6 выхода таймера 40, а отключение исполнительных механизмов определяется управляющими командами, поступающими в коммутатор аналоговых сигналов 19.
Измеритель пути 37 (или 38) выполнен в виде свободно вращающегося колеса, опирающегося ободом на пол. На валу колеса закреплен импульсный датчик угла поворота.-Диаметр измерительного колеса выбран из условия
обеспечения цены деления одного импульса не более 1 мм.
В процессе движения по трассе автоматическое транспортное средство неизбежно накапливает ошибки в позиционировании. С целью компенсации ошибок навигации и обеспечения точного позиционирования транспортного средства на конечных пунктах, данная система управления снабжена четырьмя оптическими датчиками причаливания 32-35. Датчики расположены преимущественно в средней части каждой стороны транспортного средства, а именно
датчик формирует единичный выходной сигнал в момент точного положения транспортного средства относительно специальных реперных знаков, расположенных на приемных столах у обслуживаемых станков. И режиме причаливания транспортное средство перемещается с малой скоростью по направлению к приемному столу до момента обнаружения датчиками причаливания реперных знаков . Элемент 2И или 36, подключенный к выходам датчиков причаливания, формирует сигнал Конец движения, кото- рый, поступая в блок приема информации, информирует его о завершении ре- Йшма причаливания и о переходе к сле- {цукнцему действию.
В целях защиты обслуживающего пер- Сонала от столкновения с автоматичес- сим транспортным средством, система правления имеет средства обеспече- ifflH безопасности. К. ним относятся Аварийный бампер, датчик обнаружения Препятствий, аварийно-предудредитель- звуковая и световая сигнализация.
Аварийный бампер 49 представляет Јобой легкое устройство в виде рамки, вынесенное на 150-500 мм впереди и Сзади за габариты корпуса транспорт- Чого средства. Любое нажатие на аварийный бампер вызывает появление сиг- ала, который подается на вход блока Передачи информации 4, а через него fta вход коммутатора аналоговых сигналов 19, где происходит отключение управляющих сигналов от входов блоков управления приводами ходовых колес и Лерегрузочного механизма. Одновремен- о этот сигнал подается на усилитель Ј9, управляющий тормозными электромагнитными муЛтами 30 и 31, что при- йодит к резкому торможению транспортного средства. Кроме того, сигнал С блока подачи информации 4 вызывает йрекращение действий транспортного средства и переключение формирователя сигналов 46 в режим аварийного вызова.
Формирователь- сигналов 46 обеспечивает автоматическую последовательность включения лчмп световой сигнализации 47, обеспечивающих максимальное привлечение внимание к движуще- муся транспортному средству. Однов ременно блок формирования сигналов вырабатывает и через устройство звуковой сигнализации 48 издает короткие Звуковые сигналы высокого тона доста- Точной громкости, чтобы привлечь внимание человека, не видящего по какой- .шбо причине приближающееся транс йо ртное средство.
Датчик обнаружения препятствий 45 представляет собой ультразвуковой локатор с небольшой дальностью действия, примерно 1-1,5 м. Датчик располагается в передней части транспортного средства и служит для дистанционного обнаружения неожиданно возникающих препятствий на пути следования транспортного средства.
Формула изобретения
2И-ИЛИ к пятому информационному входу 25 мирователь сигналов и устройства свеблока передачи информации, второй и третий выходы которого соединены с управляющими входами соответственно первого и второго управляемых инверторов, четвертый и пятый выходы - с соответствующими управляющими входами коммутатора аналоговых сигналов, а с шестого по девятый выходы - с управляющими входами соответственно с
товой и звуковой сигнализации, причем выход датчика обнаружения препятствий соединен с шестым информационным входом блока передачи информации, 30 двенадцатый и тринадцатый выходы которого подключены к соответствующим входам формирователя сигналов,соединенного выходами с входами соответственно устро йств звуковой и световой сигнализации.
5
0
первого по четвертый датчиков причаливания.
фие.1
О
51
г/
Условный перед транспортного средства.
56
| Патент США t 4365293, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Авторское свидетельство СССР Н- 1172849, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
