Изобретение относится к машиностроению.
Целью изобретения является повышение кинематической точности путем исключения боковых зазоров за счет того, что сателлиты установлены на водиле, выполненном в виде эксцентрикового вала, и соединены с крышками посредством эксцентриковых осей, a последние и валы включают механизмы изменения эксцентриситетас
На фиг,1 изображен редуктор, осевой разрез; на фиг,2-4 - механизм изменения эксцентриситета, первый - третий варианты выполнения.
Циклоидальный редуктор (фиг.l) содержит цилиндрический корпус , внутренняя поверхность которого имеет впадины 2 с установленными в них с возможностью вращения цилиндрическими цевками 3, образующими циклоидальный профиль внутреннего зацепления, основной 4 и дополнительный 5 сателлиты, имеющие циклоидальный профиль наружного зацепления и установленные с возможностью плоскопараллельного вращения на водиле, выполненным в виде эксцентрикового вала 6 включающего механизмы 7 изменения величины эксцентриситета, образующих посадочные места сателлитов 4 и 5, а последние соединены с крышками 8
b
корпуса I посредством эксцентриковой оси 9, параллельной водилу и включающей механизмы 7 изменения эксцентриситета,,
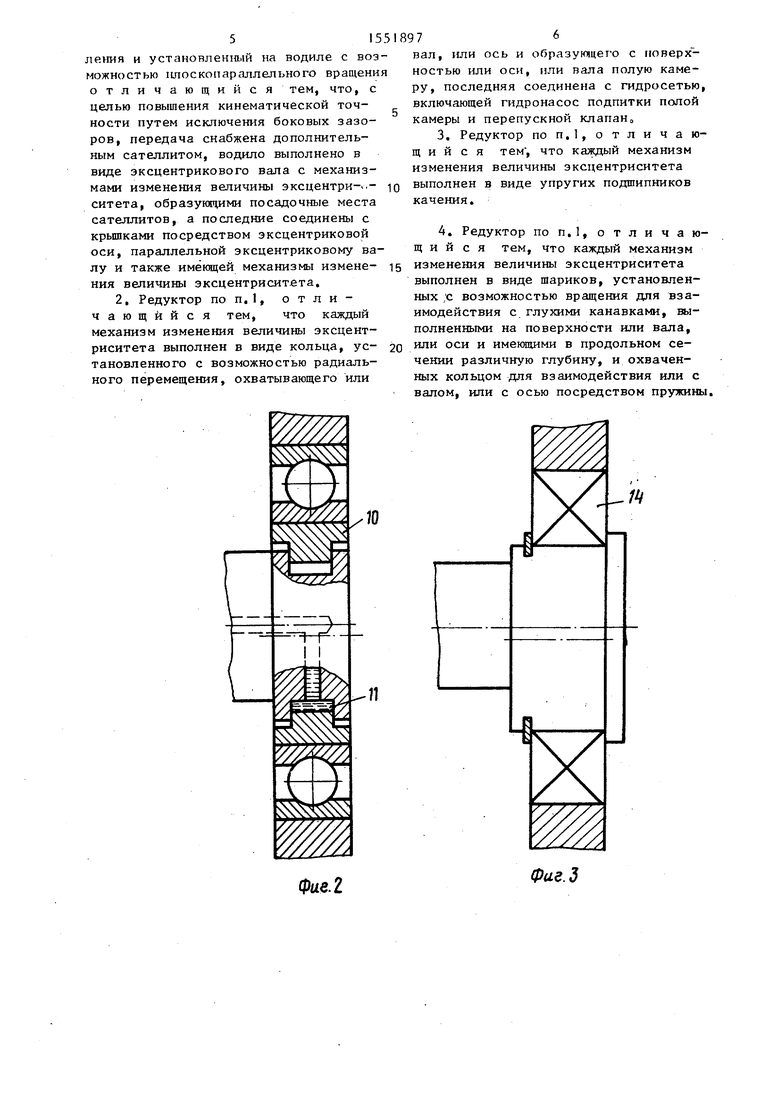
Каждый из механизмов 7 изменения величины эксцентриситета (фиг,1 и 2) может быть выполнен в виде состав- ного кольца 10, установленного с возможностью радиального перемещения охватывающего или вал 6, или ось 9 и образующего с поверхностью или вала 6, или оси 9 полую камеру 11, последняя соединена с гидросетью, включающей гидронасос 12 подпитки т полой камеры и перепускной клапан 13
Каждый из механизмов 7 изменения величины эксцентриситета () мо- жет быть выполнен в виде упругих подшипников 14 качения,,
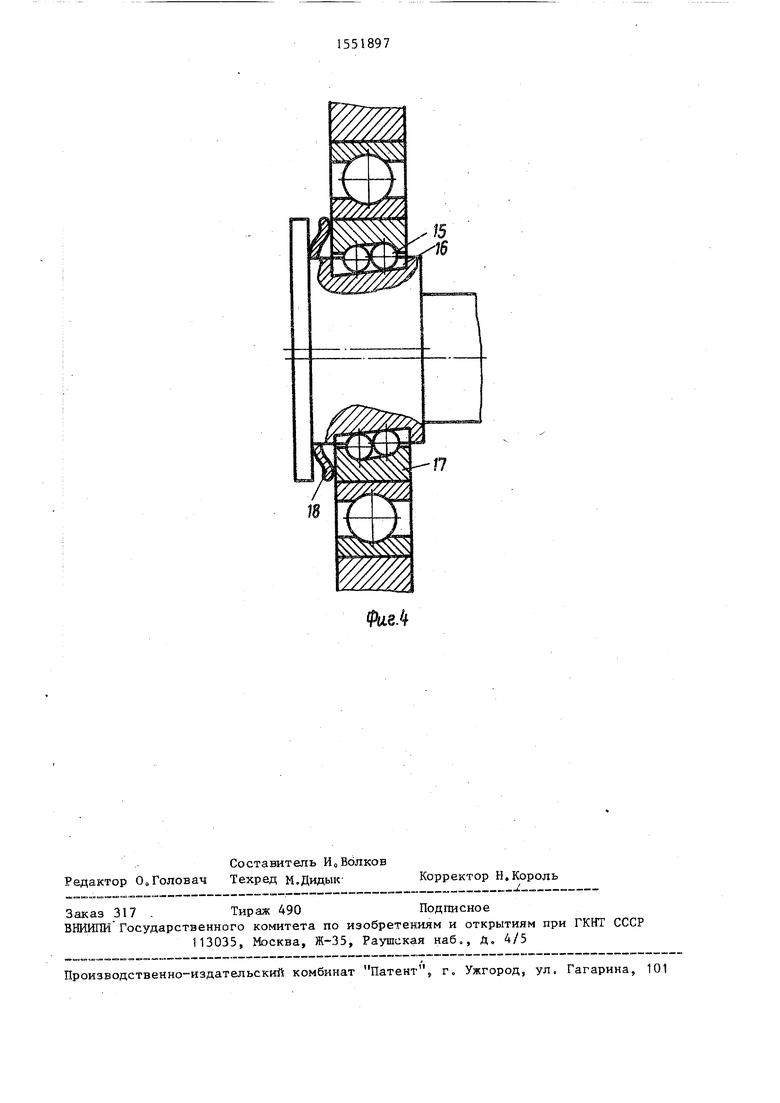
Каждый из механизмов 7 изменения величины эксцентриситета (фиг.4) может быть выполнен в виде шариков 15, установленных с возможностью вращения для взаимодействия с глухими канавками 16, выполненными на поверхности или вала 6, или оси 9, имеющих
j
0 5 0
Q $
Q
,
5
в продочьном сечении различную глубину, и охваченных кольцом 17 для взаимодействия или с валом 6, или с осью 9 посредством пружины 18.
Циклоидальный редуктор работает следующим образом.
Вращение ведущего эксцентрикового вала 6 вызывает возвратно поступательное вращение сателлитов 4 и 5 вокруг оси вала 6. Сателлиты 4 и 5, взаимодействуя циклоидальным профилем наружного зацепления с цевками 3, установленными в корпусе 1, приводят последний во вращениег
механизмы 7 изменения величины эксцентричности создают радиальное усилие на сателлитах 4 и 5, превосходящее радиальные силы в зацеплении от передаваемого момента, и вызывают максимальное увеличение межосевого расстояния до полной выборки бокового зазора возникающего зацепления сателлитов 4 и 5 с цевками 3, установленными в корпусе 1 вследствие неточности изготовления и монтажа редуктора и износа деталей.
В первом варианте выполнения механизма 7 изменения эксцентриситета (фиг.2 ) через центральные отверстия вала 6 и осей 9 в камерах 11 поддер - живается посредством перепускного клапана 10 постоянное давление, создающее радиальное усилие. Во втором варианте выполнения (фиг.З) сателлиты монтируются в корпус с предварительным натягом в упругих подшипниках 14. В третьем варианте выполнения (фиг04) сила, создаваемая пружиной 18, стремится переместить вдоль вала 6 или оси 9 кольцо 17, охватывающее шарики 15, имеющие возможность осевого и радиального перемещения в глухих канавках 16, создавая радиальное усилие на соответствующий сателлит 4 или 5.
Формула изобретения
1„ Циклоидальный редуктор, содержащий цилиндрический корпус с крышками, внутернняя поверхность которого имеет впадины с установленными в них с возможностью вращения цилиндрическими цевками, образующими циклоидальный профиль внутреннего зацепления, водило, сателлит,имеющий циклоидальный профиль наружного зацеплиния и установленный на водиле с возможностью плоскойараллельного вращения отличающийся тем, что, с целью повышения кинематической точности путем исключения боковых зазоров, передача снабжена дополнительным сателлитом, водило выполнено в виде эксцентрикового вала с механизмами изменения величины эксцентри-..- ю ситета, образующими посадочные места сателлитов, а последние соединены с крышками посредством эксцентриковой
пал, или ось и образующего с поверхностью или оси, или вала полую камеру, последняя соединена с гидросетью включающей гидронасос подпитки полой камеры и перепускной клапан0
3.Редуктор поп.1,отличаю щ и и с я тем, что каждый механизм изменения величины эксцентриситета выполнен в виде упругих подшипников качения.
4.Редуктор поп.1, отличаю
оси, параллельной эксцентриковому ва- щ и и с я тем, что каждый механизм
пал, или ось и образующего с поверхностью или оси, или вала полую камеру, последняя соединена с гидросетью, включающей гидронасос подпитки полой камеры и перепускной клапан0
3.Редуктор поп.1,отличаю- щ и и с я тем, что каждый механизм изменения величины эксцентриситета выполнен в виде упругих подшипников качения.
4.Редуктор поп.1, отличаю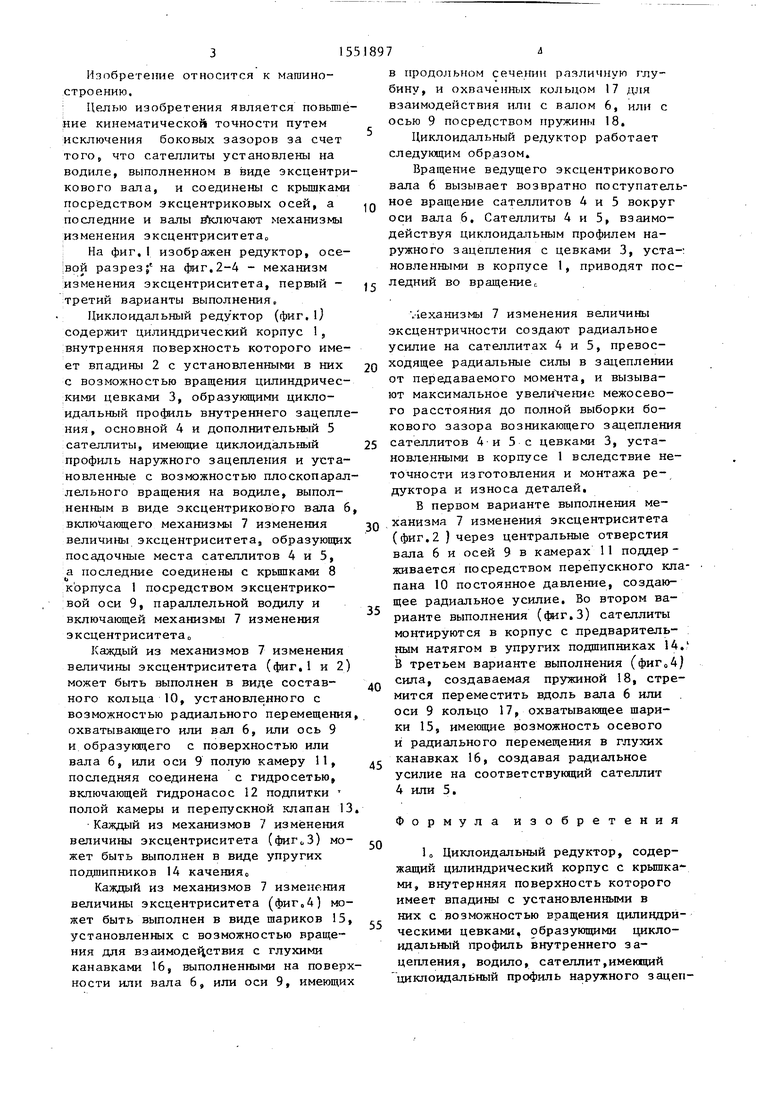
| название | год | авторы | номер документа |
|---|---|---|---|
| Циклоидальный редуктор | 1990 |
|
SU1778415A1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ РЕДУКТОР | 2012 |
|
RU2491454C1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| МУЛЬТИПЛИКАТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2001 |
|
RU2202059C2 |
| Циклоидальный редуктор | 1990 |
|
SU1772503A1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР ПОВЫШЕННОЙ МОЩНОСТИ ПЦР ПМ | 2003 |
|
RU2251038C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2003 |
|
RU2273777C2 |
| Механизм локтевого сустава роботизированного протеза плеча | 2022 |
|
RU2821186C2 |
Изобретение относится к машиностроению. С целью повышения кинематической точности путем исключения боковых зазоров циклоидальный редуктор содержащий корпус 1, на внутренней поверхности которого во впадинах 2 установлены с возможностью вращения цевки 3, сателлиты 4 и 5, имеющие циклоидальный профиль и установленные на водиле, выполненном в виде эксцентрикового вала, сателлиты 4,5 соединены с крышками 8 посредством эксцентриковой оси 9. Эксцентриковая ось 9 и вал 6 включает механизмы 7 изменения величины эксцентриситета, образующие посадочные места сателлитов 4,5. Существует три исполнения механизмом 7. Редуктор работает следующим образом. Вращения вала 6 приводит в планетарное движение сателлиты 4,5 , взаимодействующие с цевками 3 корпуса 1, в результате чего последний получает вращение. Механизмы 7 создают радиальное усилие на сателлитах 4,5, превосходящее по величине силы в зацеплении и вызывающее максимальное увеличение межосевого расстояния до полной выборки бокового зазора. 3 з.п. ф-лы, 4 ил.
лу и также имеющей механизмы измене- ния величины эксцентриситета.
zzz& z
Фие.2.
изменения величины эксцентриситета выполнен в виде шариков, установленных с возможностью вращения для взаимодействия с глухими канавками, выполненными на поверхности или вала, или оси и имеющими в продольном сечении различную глубину, и охваченных кольцом для взаимодействия или с валом, или с осью посредством пружины.
/
JO
Фае. 5
ФчгМ
| Кожевников С.М | |||
| , Есипенко Я,И., Раскин Я„М | |||
| Элементы механизмов М.: Оборонная промышленность, 956, с, 169, Аиг06270 |
