ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области медицины, а именно к протезированию и может быть использовано в качестве локтевого механизма для роботизированного протеза с возможностью электронного управления локтевым суставом при уровне ампутации на уровне плеча.
ГЛОССАРИЙ
Бионический протез - искусственная электромеханическая замена ампутированной части верхних конечностей.
Роботизированный протез плеча - искусственная электромеханическая часть верхней конечности, включающая в себя бионическую кисть, предплечье, механизм локтевого сустава с возможностью электронного управления и корпусом плеча.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны патенты, описывающие технические решения, относящиеся к роботизированным протезам плеча.
Известно техническое решение «Powered gearbox for prosthetic elbow joint» (патент №2021251778, дата публикации 19.08.2021), в котором в качестве механизма локтевого сустава используется двухступенчатый комбинированный планетарный механизм. В первой ступени используется фрикционная планетарная передача, а во второй ступени используется волновая передача. Недостатком данного технического решения являются увеличенные габариты локтевого шарнира, за счет использования двух последовательных передач, что может быть достаточно существенным ограничением для пользователя.
Известно также техническое решение «Elbow structure of electronic prosthetic hand» (патент №20200082635, дата публикации 08.07.2020), в котором в качестве механизма также используются две ступени планетарной передачи, каждая из которых состоит из солнечной и корончатой шестерней, а также 4-х сателлитов. Ступени расположены симметрично по двум сторонам механизма. На каждом из сателлитов находится по одному мотору, приводящем сателлит в движение. Данная конструкция обладает большим количеством ответственных составных деталей, требующих большой точности изготовления, а также большим количеством моторов внутри механизма, что увеличивает конечную стоимость изделия.
Из уровня техники также известно решение «The LUKE Аrm» (URL:https://www.mobiusbionics.com/luke-arm/). Недостатком данного технического решения является большая масса локтевого модуля (механизм локтевого сустава с предплечьем и плечом) - 2 кг.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Предлагаемое техническое решение направлено на расширение функциональных возможностей протезов верхних конечностей - управление роботизированным протезом плеча с меньшими малогабаритными характеристиками при снижении конечной стоимости изделия.
Известные технические решения не обеспечивают компактную и простую компоновку изделия.
Технический результат патентуемого изобретения заключается в реализации роботизированного протеза плеча, с малогабаритным механизмом локтевого сустава, состоящего из циклоидального редуктора и мотора.
Заявленный технический результат достигается благодаря использованию в качестве механизма локтевого сустава циклоидального одноступенчатого редуктора с большим передаточным числом и мотора.
Конструкция механизма локтевого сустава габаритами не более 80x80x40 мм представляет собой циклоидальный одноступенчатый редуктор, внешние детали которого - корпус редуктора внешний, поддержки нижняя и верхняя выполнены из материала Д16Т. Внешние детали соединены между собой винтами и являются неподвижными друг относительно друга во время работы механизма. Для облегчения общей массы механизма корпус редуктора внешний может изготавливаться из оргстекла, полиацеталя или других аналогов с пределом прочности не менее 60 МПа.
Мощность мотора и передаточное число циклоидального редуктора подбираются исходя из требований выходных характеристик механизма - угловая скорость сгибания/разгибания локтевого сустава не менее 0.7 рад/с, крутящий момент не менее 10 Нм.
Мотор прикреплен на задней стенке нижней поддержки, соосно с осью вращения локтевого сустава. Вал мотора соединен с валом редуктора. Вал редуктора центрируется подшипниками качения, один из которых находится в поддержке нижней, а второй во фланце выходном. Фланец выходной также центрируется подшипником качения в поддержке верхней, а также ограничивается от аксиального смещения крышкой редуктора. Поддержки верхняя и нижняя фиксируются неподвижно на корпусе редуктора винтами. На валу редуктора Устанавливаются съемные эксцентриковые шейки, ось вращения которых смещена относительно оси вращения вала редуктора на величину эксцентриситета. На эксцентриковых шейках установлены подшипники качения и циклоидальные диски. В нижней и верхней поддержках По окружности расположены отверстия, в которые устанавливаются цевки. Цевки выполняются из нержавеющей стали. Количество зубьев циклоидального диска отличается от количества цевок на 1 в меньшую сторону.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее решение поясняется ссылками на фигуры, на которых приведено следующее:
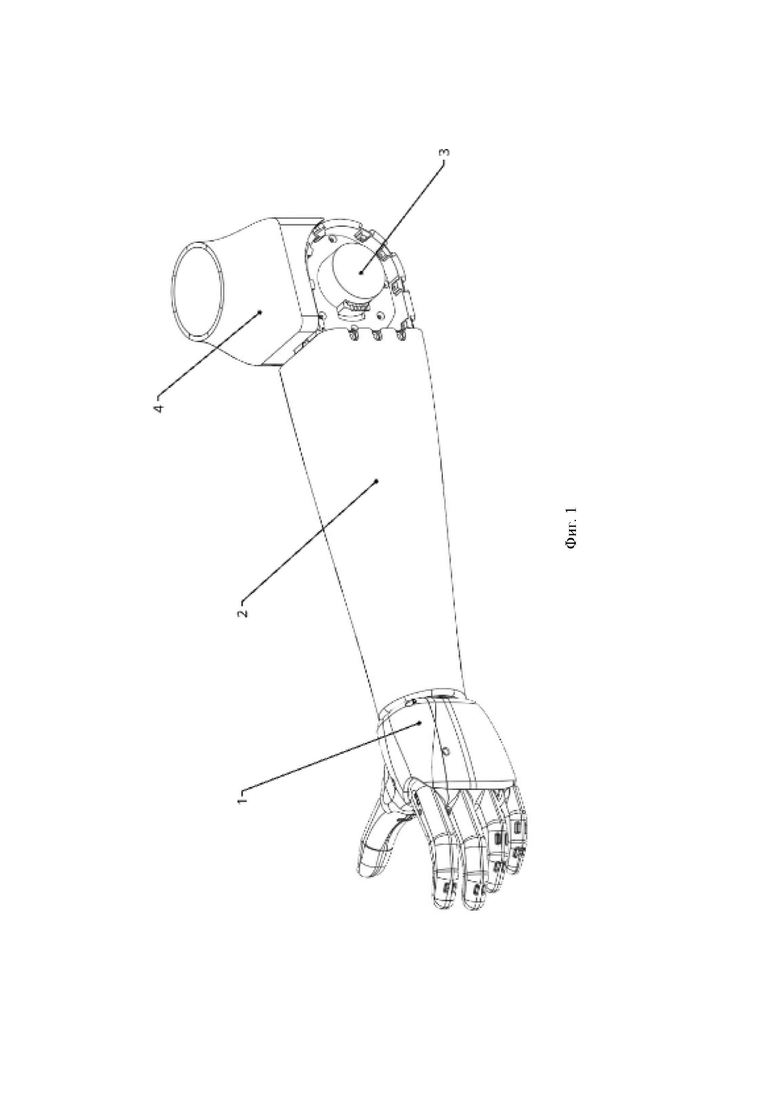
Фиг. 1 - Изометрический вид.
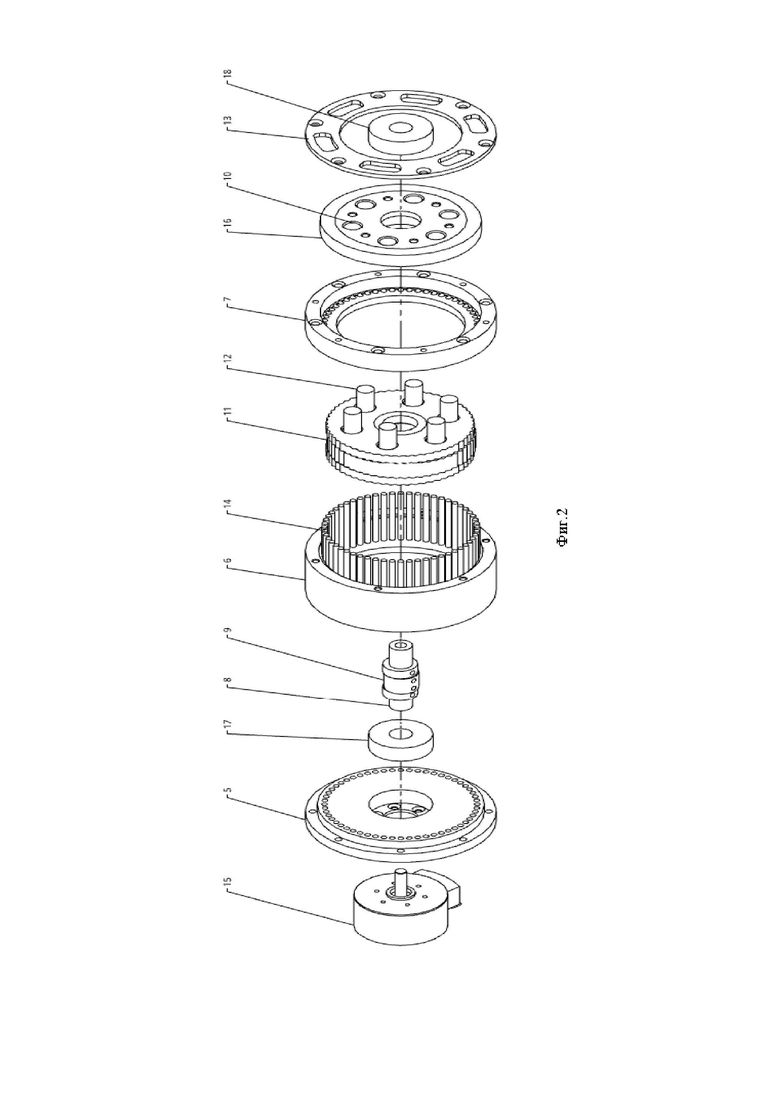
Фиг. 2 - Разнесенный вид.
1 - бионическая кисть, 2 - корпус предплечья, 3 - механизм локтевого сустава, 4 - внешняя гильза плеча, 5 - поддержка нижняя, 6 - корпус редуктора внешний, 7 -поддержка верхняя, 8 - вал редуктора, 9 - эксцентриковые шейки, 10 - выходной фланец, 11 - циклоидальные диски, 12 - пальцы, 13 - крышка редуктора, 14 - цевки, 15 -мотор, 16 - подшипник качения.
ОСУЩЕСТВЛЕНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
В процессе работы вал редуктора (8) с закрепленными на нем эксцентриковыми шейками (9) вращается с рабочей скоростью мотора (15). Вал редуктора центрируется в в подшипниках качения (17,18), расположенных в поддержках нижней (5) и верхней (7). Благодаря установленным на валу редуктора (8) эксцентриковыми шейками (9) циклоидальные диски (11) начинают вращаться, обкатываясь по профилю, образованному рядом цевок (14), установленных в поддержках верхней (7) и нижней (5). Циклоидальные диски (11) установленные эксцентрично относительно оси вращения вала редуктора (8), вращаются в противофазе друг относительно друга, обеспечивая динамическое уравновешивание. Тем самым достигается балансировка циклоидального редуктора без использования балансиров или муфт сцепления на выходном фланце (10). Пальцы (12), находящиеся в отверстиях циклоидальных дисков (11), передают вращение на выходной фланец (10). Выходной фланец (10) центрируется от радиальных смещений подшипником качения (16) в поддержке верхней (7) и ограничивается от аксиального смещения крышкой редуктора (13).
Выходной фланец (10) является подвижной частью и соединен с внешней гильзой плеча (4). Поддержка нижняя (5) является неподвижной частью и соединен с корпусом предплечья (3). Конструкция позволяет осуществлять электронно управляемое сгибание и разгибание локтевого сустава и поднимать предметы массой около 2 кг. Реверс движения локтевого сустава осуществляется сменой направления движения мотора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| МУЛЬТИПЛИКАТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2001 |
|
RU2202059C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| Односхватный электромеханический протез кисти | 2020 |
|
RU2762842C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА - ПЭ ПЦР | 2011 |
|
RU2506685C2 |
Изобретение относится к медицинской технике, а именно к локтевому механизму роботизированного протеза. Механизм локтевого сустава протеза плеча в виде одноступенчатого циклоидального редуктора с мотором, который выполнен габаритами не более 80×80×40 мм, и состоит из вала редуктора со съемными эксцентриковыми шейками, из подшипников качения и циклоидальных дисков, расположенных на эксцентриковых шейках, поддержки нижней и верхней с отверстиями для установки по окружности ряда цевок, внешнего корпуса редуктора с пределом прочности не менее 60 МПа, выходного фланца с отверстиями под пальцы и крышки редуктора, и выполнен с возможностью сгибания и разгибания с угловой скоростью не менее 0.7 рад/с и крутящим моментом не менее 10 Нм. Техническим результатом является реализация роботизированного протеза плеча, с малогабаритным механизмом локтевого сустава, состоящего из циклоидального редуктора и мотора. 2 ил.
Механизм локтевого сустава протеза плеча в виде одноступенчатого циклоидального редуктора с мотором, который выполнен габаритами не более 80×80×40 мм, и состоит из вала редуктора со съемными эксцентриковыми шейками, а также из подшипников качения и циклоидальных дисков, расположенных на эксцентриковых шейках, поддержки нижней и верхней с отверстиями для установки по окружности ряда цевок, внешнего корпуса редуктора с пределом прочности не менее 60 МПа, выходного фланца с отверстиями под пальцы и крышки редуктора, и выполнен с возможностью сгибания и разгибания с угловой скоростью не менее 0.7 рад/с и крутящим моментом не менее 10 Нм.
| US 10369016 B2, 06.08.2019 | |||
| US 2017151071 A1, 01.06.2017 | |||
| СПОСОБ ОБЕЗВОДОРОЖИВАЮЩЕГО ОТЖИГА ТИТАНА И ЕГО СПЛАВОВ | 2000 |
|
RU2179197C2 |
| US 20210259856 A1, 26.08.2021 | |||
| WO 2011028088 A1, 10.03.2011 | |||
| Односхватный электромеханический протез кисти | 2020 |
|
RU2762842C1 |

