СП
ел to
10
ho
Изобретение относится к балансировочной технике и может быть использовано для уравновешивания поплавковых узлов при изменении температуры рабочей жидкости.
Цель изобретения - повышение производительности за счет снижения трудоемкости и точности за счет устранения температурной зависимости.
На фиг.1 представлена функциональная схема устройства, реализующего способj на фиг.2 - график зависимости частоты крутильных колебаний от величины груза; на фиг.З - схема pea лизации способа в жидкости; на фиг.4 и 5 - графики зависимости частоты крутильных колебаний от перемещения мес крепления цапф по осям К и YJ на фиг.6-8 - три сечения в плоскости XOY -поплавкового узла с корректирующими грузами mf, п7 и га,.
Устройство, реализующее способ, содержит основание 1, торсионный вал 2, одним концом жестко скрепленный с основанием 1, планшайбу 3, выполненную на втором конце торсионного вала 2 и предназначенную для закрепления исследуемого поплавкового узла 4, имеющего цапфы 5 и 6, датчик
7и вибратор 8 крутильных колебаний торсионного вала 2, соединенные между собой положительной обратной связью через электронный блок 9 и ванну 10, заполненную жидкостью, предназначенную для помещения закрепленного на планшайбе 3 исследуемого поплавкового узла 4.
Устройство реализует способ следующим образом.
При помощи датчика 7 и вибратора
8системе торсионный вал 2 - планшайба 3 - исследуемый узел 4 сообщают резонансные крутильные колебания в воздухе. Это создается осуществлением положительной обратной связи меду датчиком 7 и вибратором 8 крутильных колебаний через электронный блок 9. При этом исследуемый поплавковый узел 4 закреплен на планшайбе 3 так, что ось одной из цапф (например, 5) совпадает с продольной осью торсионного вала 2.
Как известно, зависимость между силой и деформацией торсионного вала 2 является линейной только для малых деформаций. Для этого считают, что упругий восстанавливающий момент торсионного вала 2 является равным
М
,
где С(,Сг - составляющие крутильной
жесткости;
/, - угол закручивания. Крутильные колебания упомянутой системы осуществляются на малой амплитуде (малом угле с), поэтому в этом случае считают, что упругий вос- танавливающий момент изменяется по линейному закону
М
упр
«0,1/,
Устанавливают на этом конце (где цапфа 5) корректирующий груз массой М,(внутри поплавкового узла) и перемещают его параллельно плоскости XOY. Момент инерции поплавкового узла 4 вокруг оси (оси цапфы 5) равен
It
I ,
+ md
5
0
5
0
5
0
5
где
I1, m
d
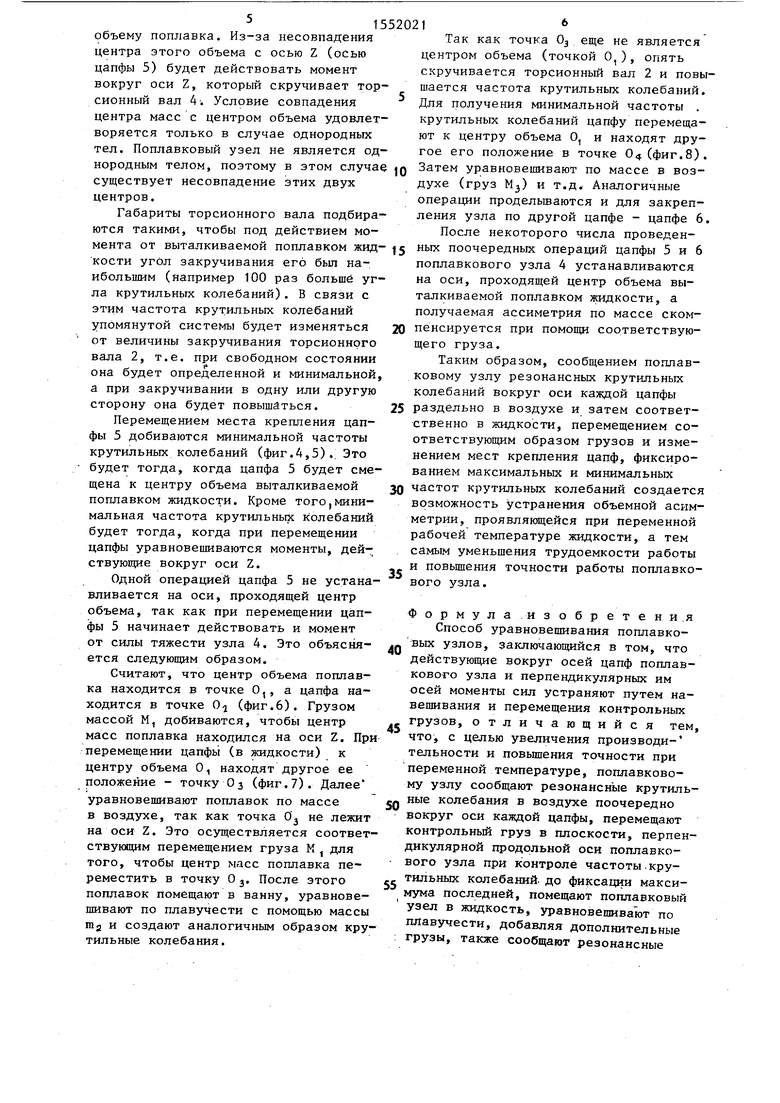
момент инерции, когда ось цапфы проходит через центр масс поплавкового узла масса поплавкового узла; расстояние между осью цапфы 5 и продольной осью, проходящей через центр масс узла. Следовательно из всех осей данного направления наименьший момент инерции системы будет относительно оси, проходящей через центр масс поплавкового узла 4. В связи с этим перемещением груза в плоскости XOY и изменением его массы добиваются минимального момента инерции системы - максимальной частоты крутильных колебаний, что соответствует наибольшей частоте крутильных колебаний (фиг.2). В этом случае добиваются, чтобы центр масс поплавкового узла 4 (узла с грузом) находился на оси Z.
После проделанных операций поплавковый узел 4 помещают в ванну 10 с жидкостью, уравновешивают по плавучести, затем закрепляют на планшайбе 3 и создают повторно резонансные крутильные колебания торсионного вала 2 (фиг.З), продольную ось которого ориентируют горизонтально. Перемещают цапфу 5 по торцовой поверхности (параллельной XOY) поплавкового узла 4 и фиксируют минимальную частоту крутильных колебаний (фиг.4 и 5).
Как известно, на помещенный в жидкости поплавковый узел 4 действует выталкивающая сила, пропорциональная
51552021
объему поплавка. Из-за несовпадения центра этого объема с осью Z (осью цапфы 5) будет действовать момент вокруг оси Z, который скручивает торсионный вал 4-. Условие совпадения центра масс с центром объема удовлетворяется только в случае однородных тел. Поплавковый узел не является од
6
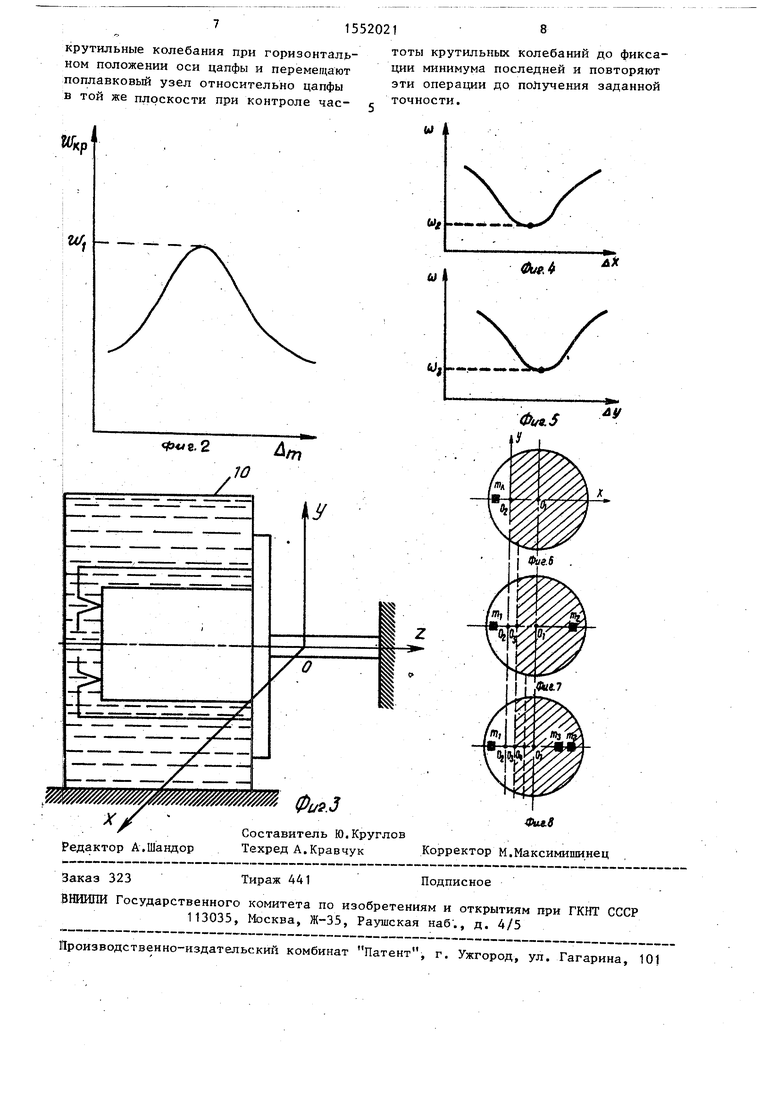
Так как точка 03 еще не является центром объема (точкой 0,), опять скручивается торсионный вал 2 и повышается частота крутильных колебаний. Для получения минимальной частоты . крутильных колебаний цапфу перемещают к центру объема О, и находят другое его положение в точке 04(фиг.8).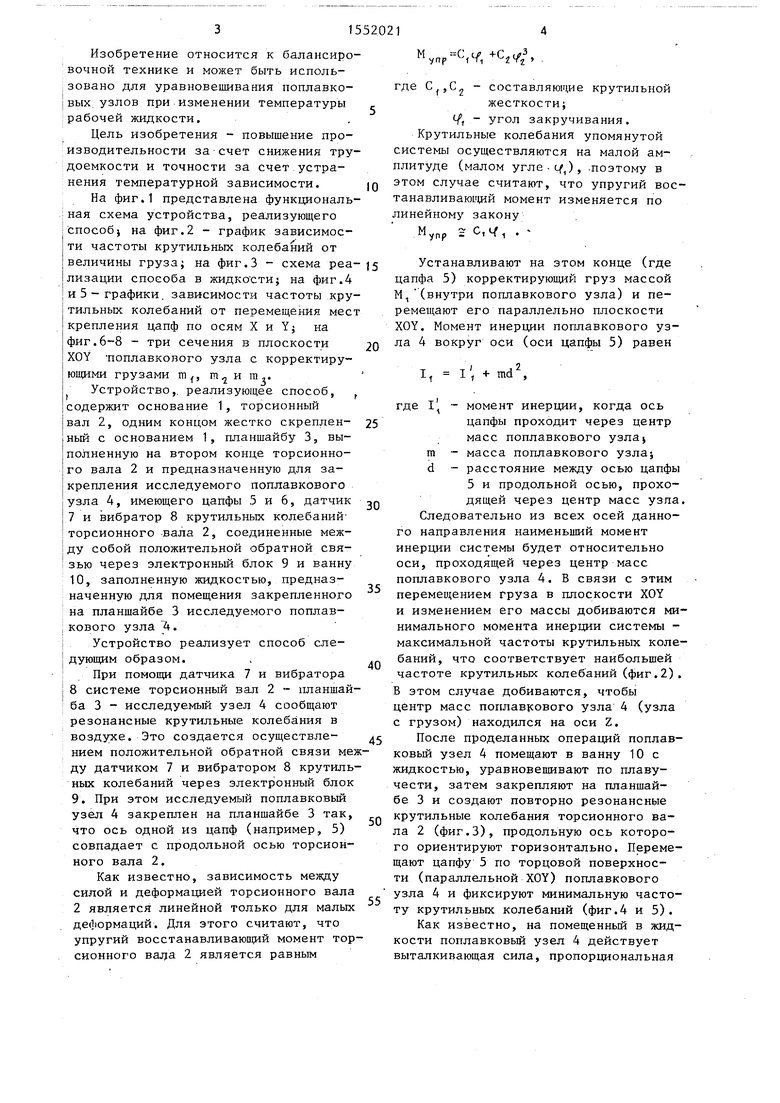
Изобретение относится к балансировочной технике. Цель изобретения - повышение производительности и точности за счет устранения температурной зависимости. В процессе измерения поплавковому узлу 4 сообщают резонансные крутильные колебания вокруг оси каждой из цапф 5 и 6 раздельно в воздухе, перемещают контрольный груз в плоскости, перпендикулярной продольной оси поплавкового узла 4, и фиксируют максимальную частоту системы крутильных колебаний. Затем помещают поплавковый узел 4 в жидкость, уравновешивают по плавучести, сообщают аналогичным образом резонансные крутильные колебания при горизонтальном положении осей цапф 5 и 6, перемещают узел 4 относительно цапф 5 и 6 в той же плоскости и фиксируют минимальную частоту крутильных колебаний, а места крепления цапф определяют, повторяя N раз поочередно соответствующие операции в воздухе и в жидкости. 8 ил.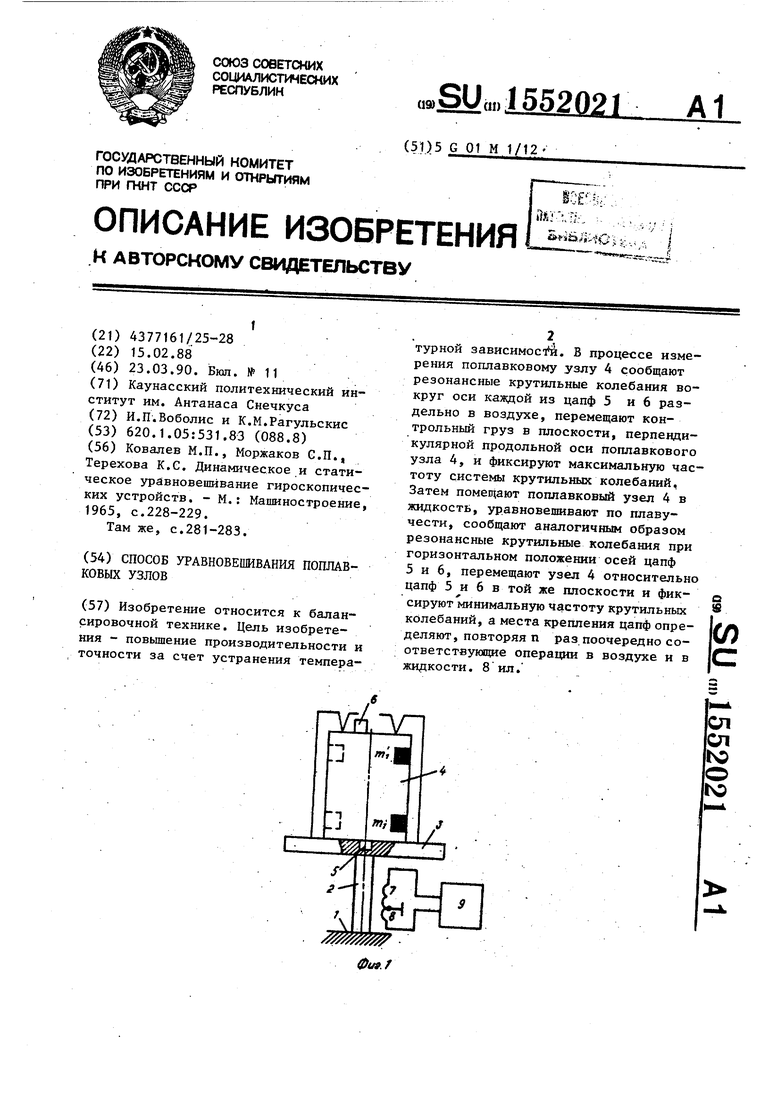
неродным телом, поэтому в этом случае JQ Затем уравновешивают по массе в воздухе (груз М3) и т.д. Аналогичные операции проделываются и для закрепления узла по другой цапфе - цапфе 6
существует несовпадение этих двух центров.
Габариты торсионного вала подбираются такими, чтобы под действием момента от выталкиваемой поплавком жид кости угол закручивания его был наибольшим (например 100 раз больше угла крутильных колебаний). В связи с этим частота крутильных колебаний упомянутой системы будет изменяться от величины закручивания торсионного вала 2, т.е. при свободном состоянии она будет определенной и минимальной а при закручивании в одну или другую сторону она будет повышаться.
Перемещением места крепления цапфы 5 добиваются минимальной частоты крутильных колебаний (фиг.4,5).. Это будет тогда, когда цапфа 5 будет смещена к центру объема выталкиваемой поплавком жидкости. Кроме того,минимальная частота крутильных колебаний будет тогда, когда при перемещении цапфы уравновешиваются моменты, дей- ствующие вокруг оси Z.
Одной операцией цапфа 5 не устанавливается на оси, проходящей центр объема, так как при перемещении цапфы 5 начинает действовать и момент от силы тяжести узла 4. Это объясняется следующим образом.
Считают, что центр объема погшав-
ка находится в точке О,, а цапфа находится в точке 0 (фиг.6). Грузом массой М1 добиваются, чтобы центр масс поплавка находился на оси Z. При перемещении цапфы (в жидкости) к центру объема 01 находят другое ее положение - точку 0з (фиг.7). Далее уравновешивают поплавок по массе в воздухе, так как точка 03 не лежит на оси Z. Это осуществляется соответствующим перемещением груза М , для того, чтобы центр масс поплавка переместить в точку О 3. После этого поплавок помещают в ванну, уравновешивают по плавучести с помощью массы гаа и создают аналогичным образом крутильные колебания.
Затем уравновешивают по массе в воз
духе (груз М3) и т.д. Аналогичные операции проделываются и для закрепления узла по другой цапфе - цапфе 6.
После некоторого числа проведенных поочередных операций цапфы 5 и 6 поплавкового узла 4 устанавливаются на оси, проходящей центр объема выталкиваемой поплавком жидкости, а получаемая ассиметрия по массе ском- пенсируется при помощи соответствующего груза.
Таким образом, сообщением поплавковому узлу резонансных крутильных колебаний вокруг оси каждой цапфы раздельно в воздухе и затем соответственно в жидкости, перемещением соответствующим образом грузов и изменением мест крепления цапф, фиксированием максимальных и минимальных частот крутильных колебаний создается возможность устранения объемной асимметрии, проявляющейся при переменной рабочей температуре жидкости, а тем самым уменьшения трудоемкости работы и повышения точности работы поплавкового узла.
Ф
0
5
ормула .-изобретени.я Способ уравновешивания поплавковых узлов, заключающийся в том, что действующие вокруг осей цапф поплавкового узла и перпендикулярных им осей моменты сил устраняют путем навешивания и перемещения контрольных грузов, отличающийся тем, что, с целью увеличения производи- тельности и повышения точности при переменной температуре, поплавковому узлу сообщают резонансные крутиль- - ные колебания в воздухе поочередно вокруг оси каждой цапфы, перемещают контрольный груз в плоскости, перпендикулярной продольной оси поплавкового узла при контроле частоты.кру- тильных колебаний- до фиксации максимума последней, помещают поплавковый узел в жидкость, уравновешивают по плавучести, добавляя дополнительные грузы, также сообщают резонансные
715520218
крутильные колебания при горизонталь-тоты крутильных колебаний до фиксаном положении оси цапфы и перемещаютЧии минимума последней и повторяют
поплавковый узел относительно цапфыэти операции до получения заданной
в той же плоскости при контроле час-с точности24
003 X
Составитель Ю.Круглов Редактор А.ШандорТехред А.Кравчук
Заказ 323
Тираж 441
ВНИВДИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
и
4
Vi
Фц.$
4У
Фал.8
Корректор М.Максимишинец
Подписное
| Ковалев М.П., Моржаков С.П., Терехова К.С | |||
| Динамическое и статическое уравновешивание гироскопических устройств | |||
| - М.: Машиностроение, 1965, с.228-229 | |||
| Там же, с.281-283. |
