25
Изобретение относится к приборостроению, а именно к прецизионным устройствам позиционирования, и может использоваться для установки . магнитных головок на информационные дорожки магнитных дисков.
Цель изобретения - повышение точности позиционирования каретки за счет увеличения точности дискретного JQ шага.
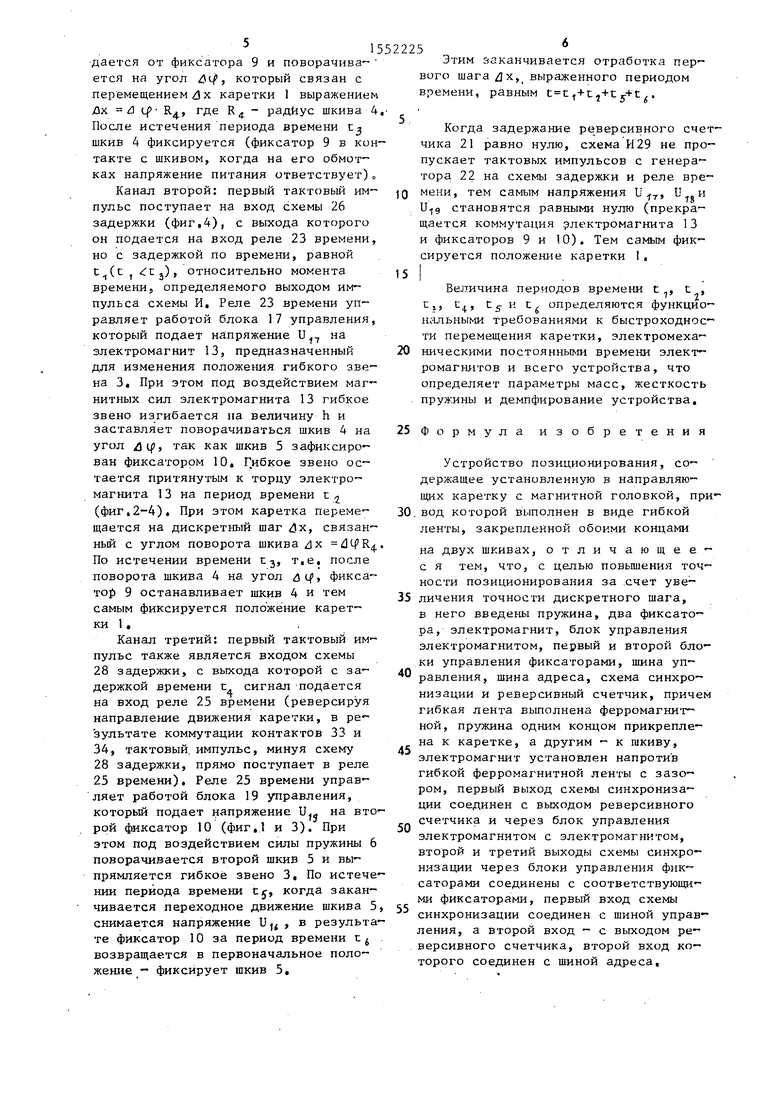
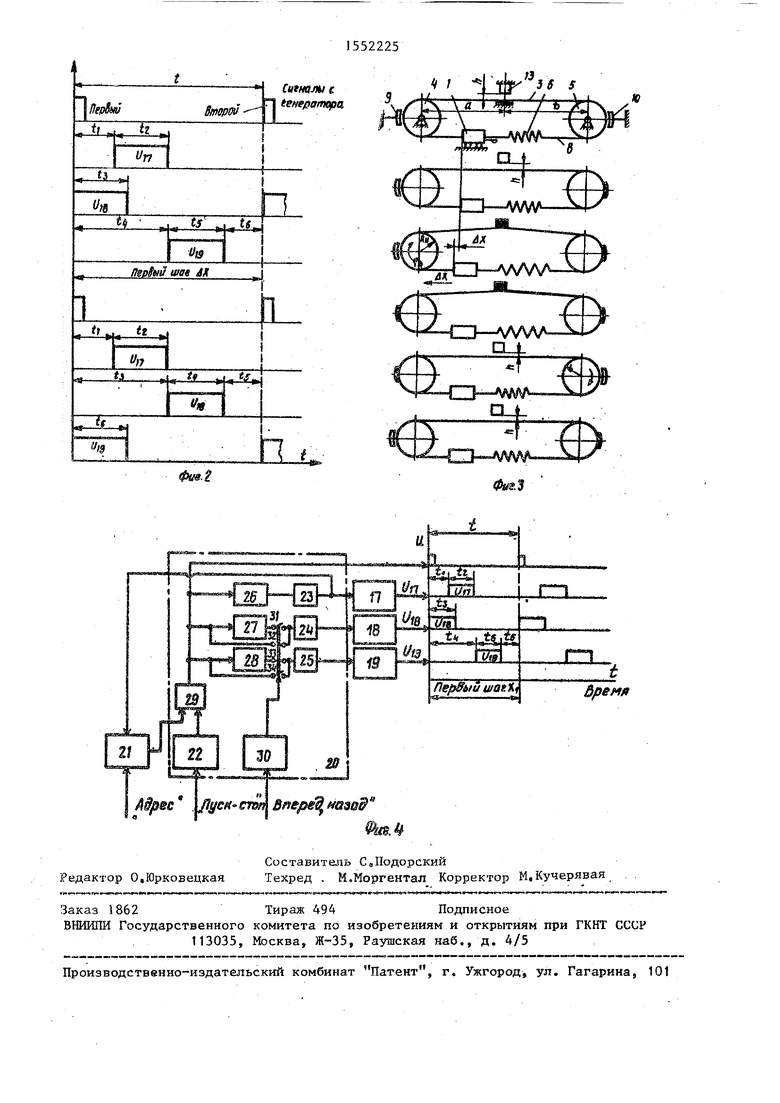
На фиг, показано устройство позиционирования, общий вид; на фиг,2 - циклограмма коммутации; на фиг.З - фиксаторы и соответствующие тактам 15 коммутации положения элементов устройства, например гибкого звена и каретки; на фиг,4 - функциональная структура схемы синхронизации.
Устройство содержит каретку 1 с 20 магнитной голоикой 2, гибкое звено 3, выполненное из ферромагнитной ленты, двумя концами прикрепленной к шкивам 4 и 5, пружину 6 натяжения, одним концом прикрепленную к каретке 1 , а другим - к шкиву 5 посредством винта 7, соединительную ленту 8, одним концом прикрепленную к каретке 1 , а другим - к шкиву 4 посредством винта 7, два фиксатора 9 и 10, 30 жестко установленных в корпусе посредством держателей 11 и 12, электромагнит 13, предназначенный для изменения положения гибкого звена 3, демпфирующую опору 14, установленную ,, против электромагнита 13 так, что между электромагнитом 13 и демпфирующей опорой 14 находится гибкое звено 3, Демпфирующая опора 14 выполнена как пластинка из пластмассы (на- до пример, фторопласта), имеющей незначительный коэффициент трения скольжения, значительное внутреннее трение и мягкую поверхность для смягчения силы удара гибкого звена. При 45 этом каретка перемещается над телами 15 с трением качения, а шкивы 4 и 5 имеют постоянные оси 16 вращения. Кроме того, устройство содержит блок
17управления электромагнитом, блоки 50
18к 9 управления фиксаторами 9 и 10 соответственно, схему 20 синхронизации и реверсивный счетчик 21,
Величина дискретного шага являетгде а и
b - конструктивно выбранные
параметры;
h - величина перемещения гибкого звена (фиг.1).
Схема 20 синхронизации содержит (фиг,4) генератор 22 тактовых импульсов, реле 23-25 времени, выходы которых соединены с входами блоков 17-19 управления соответственно, схемы 26- 28 задержки, выходами соединенные с входами реле 23-25 времени соответственно, и схему И 29, входами схем задержки служит выход схемы И 29. Кроме того, схема 20 синхронизации включает четыре ключа 31-34, управляемые блоком 30 управления, реверс которого осуществляется подачей команды Вперед, назад.
Устройство работает следующим образом (фиг.З).
На блок 30 управления подается команда Вперед, назад, которая определяет направление движения каретки. Это осуществляется коммутированием контактов 31-34 (при разомкнутых контактах 31 и 34 и замкнутых контактах 32 и 33 каретка движется в левую, а при противоположной коммутации - в правую сторону).
Подав команду Пуск на схему 20 синхронизации, запускается генератор 22, который посылает импульсы на схему совпадения И 29. Количество требуемых дискретных шагов дх, где перемещения каретки 1 впределяются содержанием реверсивного счетчика 21 по внешней команде Адрес, После задания содержания счетчика 21, схема И 29 пропускает тактовые импульсы генератора 22, Каждый пропущенный схемой И тактовый импульс с генератора 22 параллельно распределяется по трем каналам.
Канал первый: первый тактовый импульс является входом реле 24 време- ни, реверсируя направление движения каретки, контакт 31 замыкается, а контакт 32 размыкается, в результате чего тактовый импульс дополнительно проходит схему 27 задержки, после чего поступает на вход реле 24 времени. Реле 24 времени управляет работой блока 18 управления фиксатором,
ся постоянной и определяется по выра- 55 который подает напряжения U на первый фиксатор 9. Под воздействием магнитных сил фиксатор 9 освобождает
жению
ах 1 а1 + h1 + f b г + h1 - (a+b)J икив 4 на период времени, равный tv
В период времени t, шкив 4 освобож-
25
.
JQ
15
20 30,, до45
50
52225
где а и
b - конструктивно выбранные
параметры;
h - величина перемещения гибкого звена (фиг.1).
Схема 20 синхронизации содержит (фиг,4) генератор 22 тактовых импульсов, реле 23-25 времени, выходы которых соединены с входами блоков 17-19 управления соответственно, схемы 26- 28 задержки, выходами соединенные с входами реле 23-25 времени соответственно, и схему И 29, входами схем задержки служит выход схемы И 29. Кроме того, схема 20 синхронизации включает четыре ключа 31-34, управляемые блоком 30 управления, реверс которого осуществляется подачей команды Вперед, назад.
Устройство работает следующим образом (фиг.З).
На блок 30 управления подается команда Вперед, назад, которая определяет направление движения каретки. Это осуществляется коммутированием контактов 31-34 (при разомкнутых контактах 31 и 34 и замкнутых контактах 32 и 33 каретка движется в левую, а при противоположной коммутации - в правую сторону).
Подав команду Пуск на схему 20 синхронизации, запускается генератор 22, который посылает импульсы на схему совпадения И 29. Количество требуемых дискретных шагов дх, где перемещения каретки 1 впределяются содержанием реверсивного счетчика 21 по внешней команде Адрес, После задания содержания счетчика 21, схема И 29 пропускает тактовые импульсы генератора 22, Каждый пропущенный схемой И тактовый импульс с генератора 22 параллельно распределяется по трем каналам.
Канал первый: первый тактовый импульс является входом реле 24 време- ни, реверсируя направление движения каретки, контакт 31 замыкается, а контакт 32 размыкается, в результате чего тактовый импульс дополнительно проходит схему 27 задержки, после чего поступает на вход реле 24 времени. Реле 24 времени управляет работой блока 18 управления фиксатором,
икив 4 на период времени, равный tv
В период времени t, шкив 4 освобож-
дается от фиксачора 9 и поворачивается на угол A.f, который связан с перемещением j x каретки 1 выражением Јх Q Lp R, где R4 - радиус шкива 4 После истечения периода времени t шкив 4 фиксируется (фиксатор 9 в контакте с шкивом, когда на его обмотках напряжение питания ответствует)„
Канал второй: первый тактовый импульс поступает на вход схемы 26 задержки (фиг.4), с выхода которого он подается на вход реле 23 времени, но с задержкой по времени, равной С1(с f itj), относительно момента времени, определяемого выходом импульса схемы И, Реле 23 времени управляет работой блока 17 управления, который подает напряжение Uf7 на электромагнит 13, предназначенный для изменения положения гибкого звена 3. При этом под воздействием магнитных сил электромагнита 13 гибкое звено изгибается на величину h и заставляет поворачиваться шкив 4 на угол &(Jf, так как шкив 5 зафиксирован фиксатором 10. Гибкое звено остается притянутым к торцу электромагнита 13 на период времени с2 (фиг,2-4). При этом каретка перемещается на дискретный шаг 3х, связанный с углом поворота шкива dx. d4 R4. По истечении времени t-j, т.е. после поворота шкива 4 на угол ЛМ фиксатор 9 останавливает шкив 4 и тем самым фиксируется положение каретки 1 .
Канал третий: первый тактовый импульс также является входом схемы 28 задержки, с выхода которой с задержкой времени с сигнал подается
на вход реле 25 времени (реверсируя направление движения каретки, в результате коммутации контактов 33 и 34, тактовый импульс, минуя схему 28 задержки, прямо поступает в реле 25 времени). Реле 25 времени управляет работой блока 19 управления, который подает напряжение U на вто рой фиксатор 10 (фиг,1 и 3). При этом под воздействием силы пружины 6 поворачивается второй шкив 5 и выпрямляется гибкое звено 3. По истечении периода времени tj, когда заканчивается переходное движение шкива 5 снимается напряжение U ( , в резулыа те фиксатор 10 за период времени С4 возвращается в первоначальное положение - фиксирует шкив 5,
,-
Этим заканчивается отработка первого шага & х, выраженного периодом времени, равным ,+t7+t5+t,.
Когда задержание реверсивного счетчика 21 равно нулю, схема И29 не пропускает тактовых импульсов с генератора 22 на схемы задержки и реле времени, тем самым напряжения U17, U
п
U.jg становятся равными нулю (прекращается коммутация электромагнита 13 и фиксаторов 9 и 10). Тем самым фиксируется положение каретки 1.
15
Величина периодов времени
с,, t
+
С5 и С, определяются
нальными требованиями к быстроходности перемещения каретки, электромеханическими постоянными времени электромагнитов и всего устройства, что определяет параметры масс, жесткость пружины и демпфирование устройства.
Форму л а изобретения
Устройство позиционирования, содержащее установленную в направляющих каретку с магнитной головкой, при- вод которой выполнен в виде гибкой ленты, закрепленной обоими концами
на двух шкивах, отличающее - с я тем, что, с целью повышения точности позиционирования за счет уве- личения точности дискретного шага, в него введены пружина, два фиксатора, электромагнит, блок управления электромагнитом, первый и второй блоки управления фиксаторами, шина управления, шина адреса, схема синхронизации и реверсивный счетчик, причем гибкая лента выполнена ферромагнитной, пружина одним концом прикреплена к каретке, а другим - к шкиву, электромагнит установлен напротив гибкой ферромагнитной ленты с зазором, первый выход схемы синхронизации соединен с выходом реверсивного счетчика и через блок управления электромагнитом с электромагнитом, второй и третий выходы схемы синхронизации через блоки управления фиксаторами соединены с соответствующими фиксаторами, первый вход схемы синхронизации соединен с шиной управления, а второй вход - с выходом реверсивного счетчика, второй вход которого соединен с шиной адреса.
ТГ
-Ч СutHOMi с. ;
--|Г &$р
.. ч .
о
it
ts .t
%
flgpttfi utat ЛИ
b tt m
n
ti
tt ts
u
vJZ-J - лллд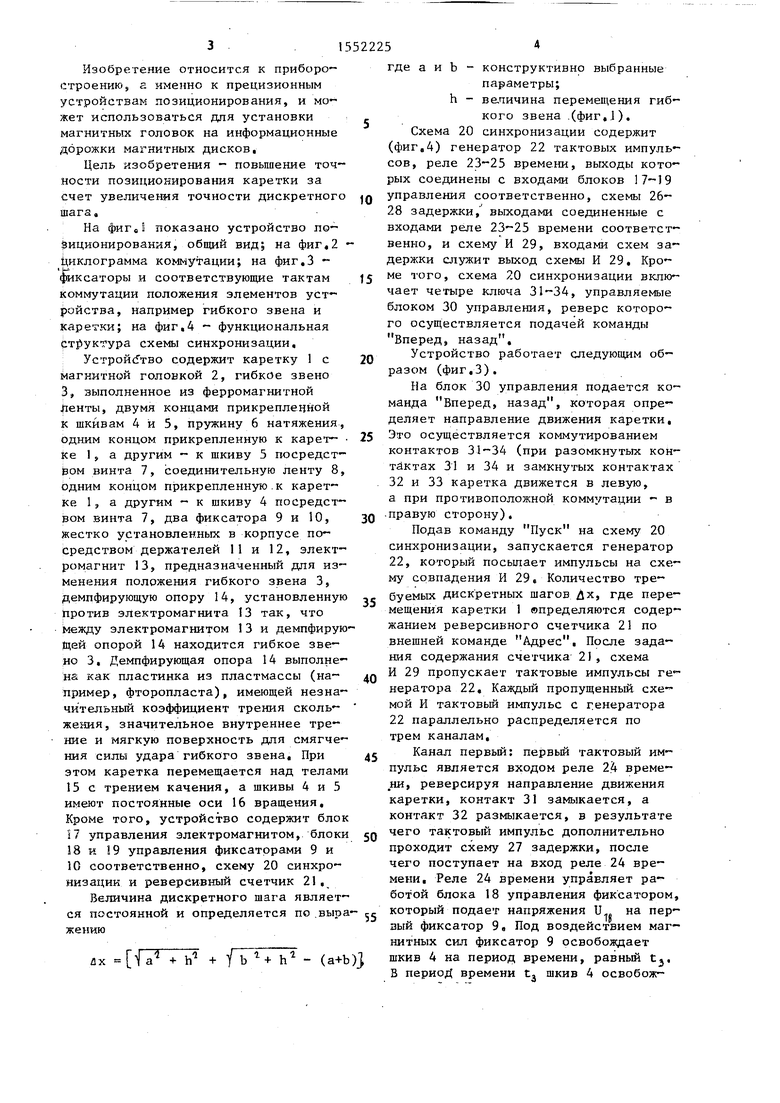
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ПРИЕМНИКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1980 |
|
SU1840647A1 |
| аСЕС©Юч1НАЯ | 1973 |
|
SU367198A1 |
| Источник сейсмических сигналов ударного типа | 1988 |
|
SU1557538A1 |
| ЗЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНО-ИМПУЛЬСНА.Я СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU292140A1 |
| Устройство тактовой синхронизации | 1980 |
|
SU869074A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1462234A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА ПРОЧНОСТЬ | 2000 |
|
RU2178161C2 |
| Устройство для автоматического управления поливом при подпочвенном орошении | 1985 |
|
SU1296057A1 |
| Модуль промышленного робота | 1986 |
|
SU1393621A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНАЯ СЛЕДЯЩАЯ | 1973 |
|
SU370376A1 |
Изобретение относится к приборостроению и может быть использовано в приводах позиционирования магнитных головок над информационными дорожками магнитных дисков. Цель устройства - повышение точности позиционирования каретки за счет увеличения точности дискретного шага. Устройство содержит каретку 1 с магнитной головкой 2, перемещающуюся над телами 15 с трением качения, гибкое звено 3, посредством винтов 7 концами прикрепленное к шкивам 4 и 5, соединительную ленту 8, связанную через каретку 1 с пружиной 6 натяжения, концы соединительной ленты 8 и пружины 6 крепятся к шкивам 4 и5 соединительными винтами 7. Устройство также содержит фиксаторы 9 и 10, прикрепленные к корпусу посредством держателей 11 и 12 соответственно, электромагнит 13 и демпфирующую опору 14, установленную против электромагнита 13. Кроме того, устройство содержит блок 17 управления электромагнитом, блоки 18 и 19 управления фиксаторами 9 и 10 соответственно, схему 20 синхронизации и реверсивный счетчик 21. Существенным отличием устройства является передаточный механизм (каретка - гибкое звено - электромагнит - фиксаторы), который трансформирует движение ведущего звена на величину движения второго порядка малости ведомого звена. 4 ил.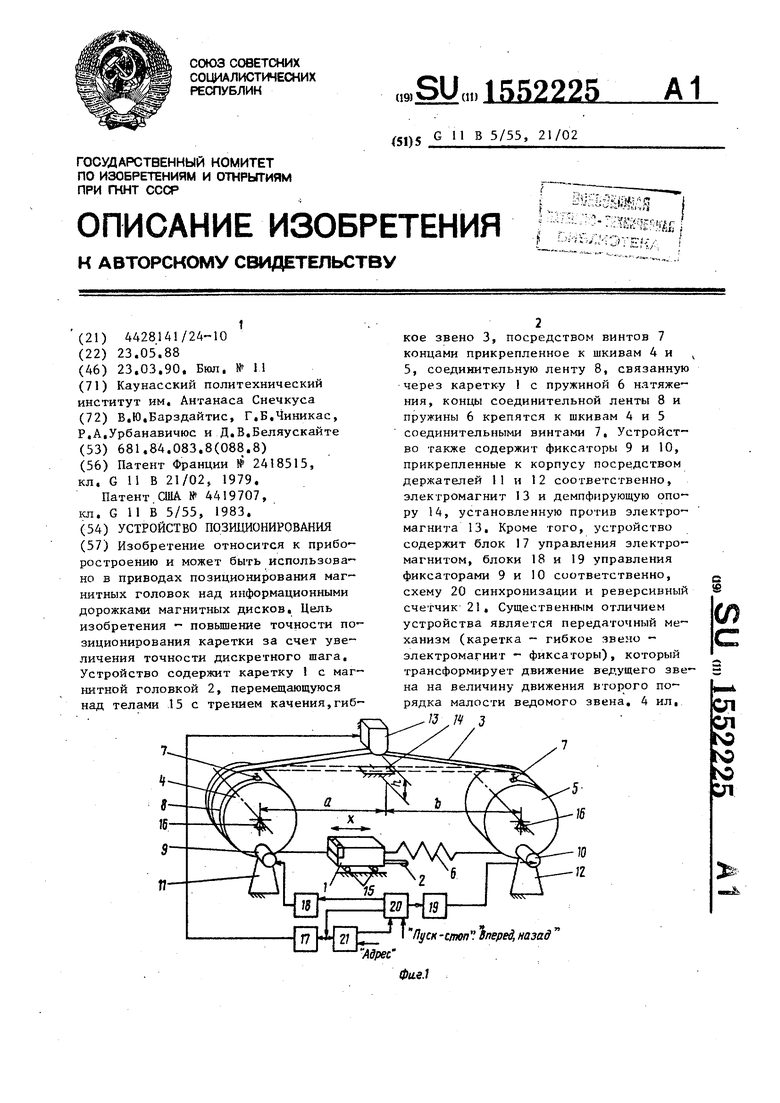
Фив 2
Фиг.
| СПОСОБ ВЫРАБОТКИ КОМПОТА ИЗ АЙВЫ | 2010 |
|
RU2418515C1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Патент США № 4419707, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
