оо со
00
05
to
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ РАЗМАТЫВАНИЯ И СМАТЫВАНИЯ ШНУРА ЭЛЕКТРОПИТАНИЯ | 2009 |
|
RU2503610C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785422C1 |
| ГУСЕНИЧНЫЙ СВАРОЧНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ РОБОТОМ | 2019 |
|
RU2754728C1 |
| УСТРОЙСТВО КОНТРОЛЯ РЕМНЯ ОГРАНИЧИТЕЛЯ СКОРОСТИ И ЭЛЕКТРОННЫЙ ОГРАНИЧИТЕЛЬ СКОРОСТИ | 2018 |
|
RU2774373C2 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯМИ СВЯЗАННОГО ОБЪЕКТА | 1995 |
|
RU2092404C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560113C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2016 |
|
RU2611126C1 |
| Роликовые коньки | 1976 |
|
SU1248624A1 |
| Устройство позиционирования | 1988 |
|
SU1552225A1 |

Фи.1
Изобретение относится к машиностроению, а именно к механизмам программируемого линейного перемещения, и может быть использовано при созда- НИИ промьпЕпенных роботов.
Цель изобретения - повьппение надежности работы модуля за счет исключения влияния изменения длины гибкого звена кинематической передачи на точность позиционирования.
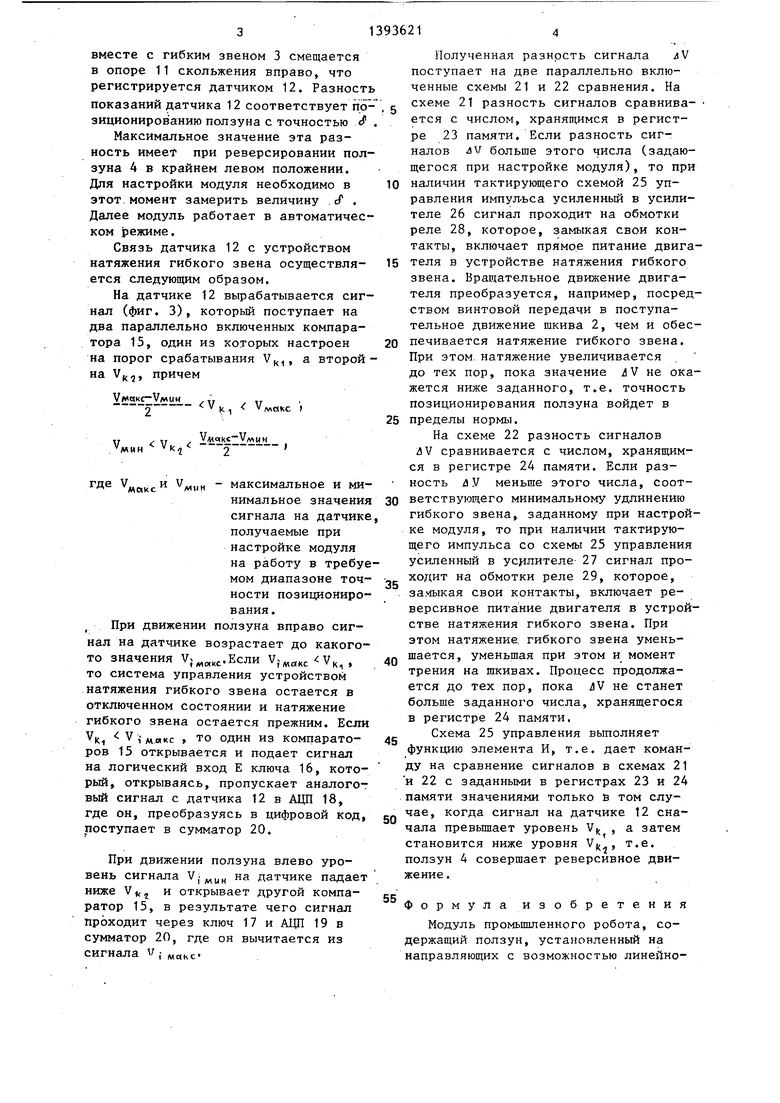
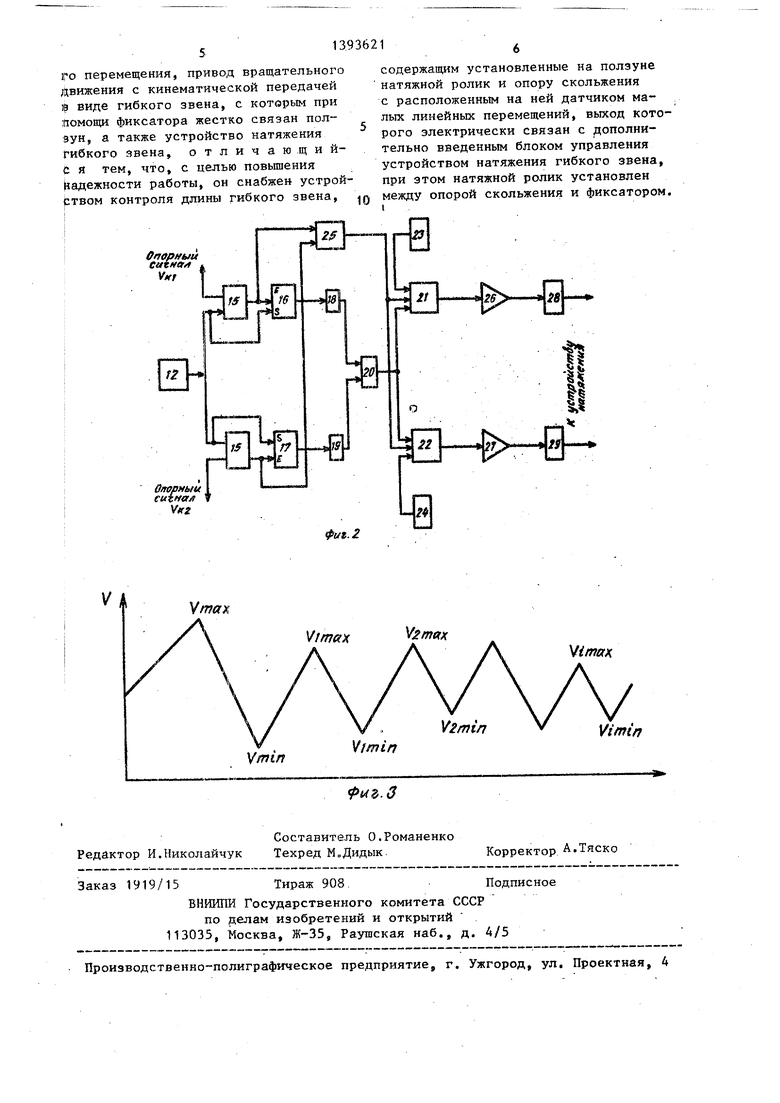
На фиг. 1 показан модуль промыш- ренного робота, общий вид| на фиг, 2- схема блока управления устройством натяжения гибкого звена| на фиг. 3- орма сигнала, снимаемого с датчика малых линейных перемещений. j Модуль промышленного робота со держит ведущий 1 и ведокай 2 шкивы, охваченные гибким звеном 3, ползун 45 установленный на направляющих 5 и жестко связанны с гибким звеном 3 при помощи фиксатора 6, привод 7 вращательного движения, устройство 8 натяжения гибкого звена 3, опорные щеки 9, служащие каркасом модуля а также устройство контроля длины |гибкого звена 3, состоящее из натяж- |Ного ролика lOj опоры 11 скольжения., датчика ,12 малых линейных перемеще- НИИ, закрепленного на опоре 11, и метки 13, нанесенной на участке гибкого звена 3, расположенного в опоре 11 скольжения.
I Выход датчика 12 электрически связан с блоком 14 управления устрой ICTBOM натяжения гибкого звена, состоящим из двух компараторов 15, клю |чей 16 и 17, блоков 18 и 19 аналого- цифрового преобразования (АЦП), сум- матора 20, схем 21 и 22 сравнения, регистров 23 и 24 памяти, схемы 25 управления, усилителей 26 и 27 и реле 28 и 29, контакты которых включа- toT прямое или реверсивное питание электродвигателя, входящего в состав устройства натяжения гибкого звена.
Устройство работает следующим образом
Ведущий шкив 1,, получая вращательное Движение от привода 7, преобразует его через гибкое звено 3 в поступательное движение ползуна 4, При этом перемещение ползуна должно соответствовать расчетному кз формулы
s Jl|..,,
где S - перемещение ползуна;
D - диаметр ведущего шкива;
gi - угловое перемещение ведущего
шкива.
Однако фактическое перемещение ползуна отличается от расчетного на величину удлинения гибкого звена, т.е.
S,
S- Л1,
где Зф - фактическое перемещение ползуна}
А1 - удлинение гибкого звена.
Удлинение гибкого звена складывается из его температурной деформации, естественного з длинения гибкого звена в процессе эксплуатации, а также дополнительного растяжения отдельных его участков, вызванного воздействием вращаюпдего момента на ведущем ве и сил сопротивления перемещению ползуна по направляющим. Последняя составляющая выражается законом Гука;
1
Д Р
F1
FS
где 1 - первоначальная длина участка гибкого звена, заключенного между ведущим шкивом и фиксатором гибкого звена на ползуне
F - сила сопротивления перемещению ползуна по направляющим; S - площадь сечения гибкого звена
удлинение выбранного участка гибкого звена под действием
силы F. I
При вращении шкива 1 против часовой стрелки первый участок гибкого звена, заключенный между ведущим шкивом 1 и фиксатором 6 гибкого звена 3 на ползуне 4, удлиняется и это удлинение передается шкивом 1 остальной части гибкого звена 3. При этом метка 13 смещае тся вместе с гибким звеном 3 в опоре 11 скольжения влево, вызывая изменение показания датчика 12 малых линейных перемещений. Реверс привода 7 вращательного движения и связанного с ним шкива 1 вызывает растяжение уже другого участка гибкого звена, а именно охватывающего ведомый шкив 2.
Это удлинение передается первому участку гибкого звена и под действием натяжного ролика 10 метка 13
вместе с гибким звеном 3 смещается в опоре 11 скольжения вправо, что регистрируется датчиком 12. Разность показаний датчика 12 соответствует позиционированию ползуна с точностью
Максимальное значение эта разность имеет при реверсировании ползуна 4 в крайнем левом положении. Для настройки модуля необходимо в этот, момент замерить величину сГ . Далее модуль работает в автоматическом режиме.
Связь датчика 12 с устройством натяжения гибкого звена осуществляется следующим образом.
На датчике 12 вырабатывается сигнал (фиг. 3), которьй поступает на два параллельно включенных компаратора 15, один из которых настроен на порог срабатывания V,, а второй на V,, причем
МЙКС I
где .и - максимальное и минимальное значения сигнала на датчике получаемые при настройке модуля на работу в требуемом диапазоне точности позиционирования.
При движении ползуна вправо сигнал на датчике возрастает до какого- то значения У,.„,,.Если ,e VK, , то система управления устройством натяжения гибкого звена остается в отключенном состоянии и натяжение гибкого звена остается прежним. Если VK, V ,- д,а«с , то один из компарато- ров 15 открывается и подает сигнал на логический вход Е ключа 16, который, открываясь, пропускает аналоговый сигнал с датчика 12 в АЦП 18, где он, преобразуясь в цифровой код, поступает в сумматор 20.
При движении ползуна влево уровень сигнала V на датчике падает ниже VK и открывает другой компаратор 15, в результате чего сигнал Проходит через ключ 17 и АЦП 19 в сумматор 20, где он вычитается из сигнала V; „,
Полученная разность сигнала AV поступает на две параллельно включенные схемы 21 и 22 сравнения. На схеме 21 разность сигналов сравнива- ется с числом, хранящимся в регистре 23 памяти. Если разность сигналов л больше этого числа (задающегося при настройке модуля), то при
0 наличии тактирующего схемой 25 управления импул-ьса усиленный в усилителе 26 сигнал проходит на обмотки реле 28, которое, замыкая свои контакты, включает прямое питание двига5 теля в устройстве натяжения гибкого звена. Вращательное движение двигателя преобразуется, например, посредством винтовой передачи в поступательное движение шкива 2, чем и обес0 печивается натяжение гибкого звена. При этом натяжение увеличивается до тех пор, пока значение не окажется ниже заданного, т.е. точность позиционирования ползуна войдет в
5 пределы нормы.
На схеме 22 разность сигналов uV сравнивается с числом, хранящимся в регистре 24 памяти. Если раз- ность 4 У меньше этого числа, соот0 ветствующего минимальному удлинению гибкого звена, заданному при настройке модуля, то при наличии тактирующего импульса со схемы 25 управления усиленный в усилителе 27 сигнал проходит на обмотки реле 29, которое, зa.vIыкaя свои контакты, включает реверсивное питание двигателя в устройстве натяжения гибкого звена. При этом натяжение, гибкого звена умень шается, уменьшая при этом и момент трения на шкивах. Процесс продолжается до тех пор, пока uV не станет больше заданного числа, хранящегося в регистре 24 памяти.
Схема 25 управления вьтолняет функцию элемента И, т.е. дает команду на сравнение сигналов в схемах 21 и 22 с заданными в регистрах 23 и 24 памяти значениями только в том случае, когда сигнал на датчике 12 сна5
5
0
5
чала превьппает уровень Vj, , а затем становится ниже уровня Vj , т.е. ползун 4 совершает реверсивное движение.
Формула изобретения
Модуль промьшшенного робота, содержащий ползун, установленный на направляющих с возможностью линейного перемещения, привод вращательного движения с кинематической передачей )Э виде гибкого звена, с которым при помощи фиксатора жестко связан пол- дун, а также устройство натяжения гибкого звена, отличаю щи й- t я тем, что, с целью повышения Надежности работы, он снабжен устройством контроля длины гибкого звена,
г
Опорный J
Vf 1
, J ft.
П
Опорный сигнал
Ук2
г
/5
Vfnin
содержащим установленные на ползуне натяжной ролик и опору скольжения с расположенным на ней датчиком малых линейных перемещений, выход которого электрически связан с дополнительно введенным блоком управления устройством натяжения гибкого звена, при зтом натяжной ролик установлен между опорой скольжения и фиксатором.
-
И
:&
22
Х,.1п.,, J/jr|,
ima)(
Vimin
Vimiff
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| Справочное пособие | |||
| - М.: Машиностроение, 1976, с | |||
| Ветряный двигатель | 1922 |
|
SU553A1 |
| , (54) ПРОМЫШЛЕННОГО РОБОТА ;(57) Изобретение относится к области машиностроения и может быть использовано при создании промьшшенных роботов | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Для этого модуль, содержащий ползун 4, установленный на направляющих 5 с возможностью линейного перемещения и жестко связанный с помощью фиксатора 6 с гибким звеном 3, привод 7 и устройство натяжения 8 гибкого звена, дополнительно снабжен устройством контроля длины гибкого звена, содержащим натяжной ролик 10 и опору скольжения 11 с датчиком 12 1 1алых линейных перемещений, а также блоком управления 14 | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
