1
(21)4447278/24-07
(22)24.06.88
(46) 23.03.90. Бюл. 11
(71)Новочеркасский политехнический институт им. Серго Орджоникидзе
(72)В.С.Елсуков и О.Р.Калабухов
(53)621.316.718.5(088.8)
(56)Авторское свидетельство СССР В 1309231, кл. Н 02 Р 5/06, 1987.
Автоматизированный электропривод. Материалы семинара. - М., 1980, с. 138.
(54)ЭЛЕКТРОПРИВОД
(57)Изобретение относится к электро- ,технике, а именно к автоматизированному электроприводу, и может быть использовано в системах подчиненного регулирования электропривода. Цель изобретения - повышение надежности. Электропривод содержит двигатель 1 с датчиком 2 тока, регуляторы 4 и 5 тока, которые через интегросуммирующий усилитель 8 и суммирующий усилитель 9 подключены к входу преобразователя 3, выход которого подключен к двигателю 1. Введением усилителей 8 и 9 достигается инвариантность тока двигателя относительно возмущении и повышается надежность электропривода. 1 ил.
3
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| ЭЛЕКТРОПРИВОД С УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2000 |
|
RU2181523C2 |
| ЭЛЕКТРОПРИВОД С КООРДИНАТНО-ПАРАМЕТРИЧЕСКИМ УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2004 |
|
RU2261522C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2544483C1 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| ЭКСКАВАТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2068615C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
Изобретение относится к электротехнике, а именно к автоматизированному электроприводу, и может быть использовано в системах подчиненного регулирования электропривода. Цель изобретения - повышение надежности. Электропривод содержит двигатель 1 с датчиком 2 тока, регуляторы тока 4 и 5, которые через интегросуммирующий усилитель 8 и суммирующий усилитель 9 подключены к входу преобразователя 3, выход которого подключен к двигателю 1. Введением усилителей 8 и 9 достигается инвариантность тока двигателя относительно возмущений и повышается надежность электропривода. 1 ил.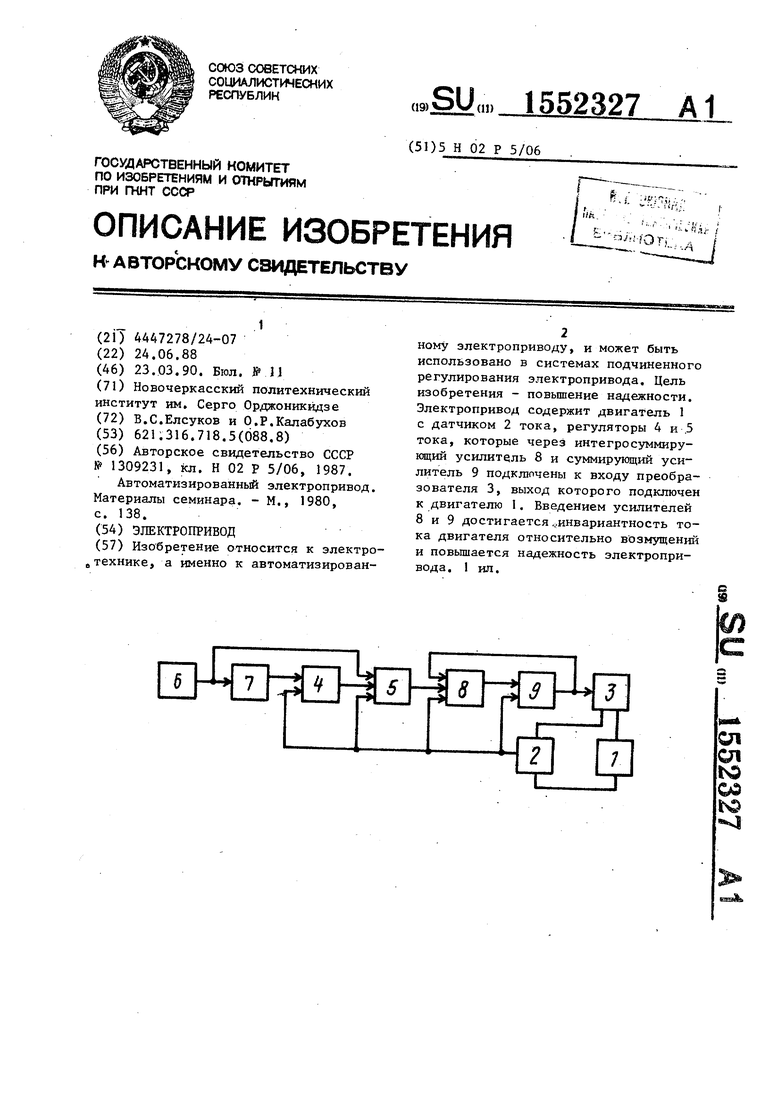
ел ел
tsD
со ю 1
Изобретение относится к электротехнике, а именно к автоматизированному электроприводу, и может быть использовано в системах подчиненного регулирования электропривода.
Цель изобретения - повышение качества регулирования,
На чертеже приведена схема электропривода.
Электропривод содержит двигатель 1 с датчиком 2 тока, подключенный к выходу преобразователя 3, первый регулятор 4 тока, выходом соединенный с одним входом второго регулятора 5 тока, второй вход которого подключен к задатчику 6 тока, а третий вход соединен с датчиком 2 тока, подключенный к одному входу первого регулятора 4 тока, инерционный фильтр 7, интегросуммирующий усилитель 8, суммирующий усилитель 9. Задатчик 6 тока через инерционный фильтр 7 соединен с вторым входом первого регулятора 4 тока. Выход второго регулятора 5 тока через интегросумммрующий усилитель 8 и суммирующий усилитель 9 соединен с входом преобразователя 3 и вторым входом интегросуммирующего усилителя 8, третий вход которого и второй вход суммирующего усилителя 9 соединены с датчиком 2 тока. ., Электропривод работает следующим образом.
Сигнал с задатчика 6 тока поступает на вход инерционного фильтра 7 и на один из входов регулятора 5, который является интегральным. На два других входа регулятора 5 поступают соответственно выходной сигнал датчика 2 тока и выходной сигнал регулятора 4, который является тоже интегральным. Сигналы, поступающие на входы регулятора 5, в нем алгебраически суммируются и полученный результирующий сигнал интегрируется, а затем поступает на один из входов инте росуммирующего усилителя 8. На два других входа последнего поступают соответственно выходной сигнал суммирующего усилителя 9 и выходной сигнал датчика 2 тока. В интегросумми- рующем усилителе 8 его входные сигналы тоже алгебраически суммируются и полученный результирующий сигнал интегрируется, а затем поступает на один из входов суммирующего усилителя 9. На другой вход суммирующего усилителя 9 поступает выходной сиг
5
0
5
0
5
0
5
0
5
нал датчика 2 тока. В суммирующем усилителе 9 его входные сигналы сравниваются между собой и полученный результирующий сигнал усиливается. Выходной сигнал суммирующего усилителя 9 поступает на управляющий вход преобразователя 3, который изменяет напряжение питания двигателя 1. В результате начинает изменяться ток электропривода и, соответственно, выходной сигнал датчика 8 тока. В это же время начинает изменяться и выходной сигнал инерционного ра 7. Поэтому регулятор 4, который является тоже интегральным, вступает в работу, изменяя свой выходной сигнал, только тогда, когда не равен нулю результат сравнения его входных сигналов, поступающих соответственно с датчика 2 тока и с выхода инерционного фильтра 7.
Введением инерционного фильтра, интегросуммирующего и суммирующего усилителей достигается инвариантность тока электропривода относительно возмущений, действующих на электромагнитную цепь двигателя, т.е. повышается точность регулирования и снижается чувствительность к изменению параметров электропривода.
Формула изобретения
Электропривод, содержащий двигатель с датчиком тока, подключенный к выходу преобразователя, первый регулятор тока, выходом соединенный с одним входом второго регулятора тока, второй вход которого подключен к задатчику тока, а третий вход соединен с датчиком тока, подключенным к одному входу первого регулятора тока, отличающийся тем, что, с целью повышения качества регулирования, в него введены инерционный фильтр, интегросуммирующий усилитель, суммирующий усилитель, при этом задат- чик тока через инерционный фильтр соединен с вторым входом первого регулятора тока, выход второго регулятора тока через интегросуммирующий усилитель и суммирующий усилитель соединен с входом преобразователя и вторым входом ннтегросуммирующего усилителя, третий вход которого и второй вход суммирующего усилителя соединены с датчиком тока.
