Изобретение относится к автоматизированному электроприводу и может быть использовано в системах подчиненного регулирования электропривода постоянного тока, параметры которого имеют достаточно широкий рабочий диапазон своего изменения.
Известен электропривод с адаптивным регулированием тока /1/. Однако этот электропривод является достаточно сложным и, следовательно, недостаточно надежным.
Известен также электропривод с двойным регулятором тока /2/, содержащий двигатель с датчиком тока, подключенный к выходу преобразователя, последовательно соединенные задатчик тока, инерционный фильтр, первый интегральный и второй пропорциональный регуляторы тока, которые подключены вторым входом к выходу датчика тока, третий вход второго регулятора тока подсоединен к задатчику тока, а выход того же регулятора - ко входу преобразователя.
При определенном выборе параметров регуляторов тока этот электропривод является достаточно малочувствительным к параметрическим возмущениям. Но это достигается за счет снижения его быстродействия. Поэтому данный электропривод имеет недостаточно высокую динамическую точность регулирования тока.
Наиболее близким аналогом (прототипом) к предлагаемому техническому решению является многоконтурный электропривод с управлением по производной тока /3/, содержащий двигатель с датчиком тока, подключенный к выходу преобразователя, задатчик тока, инерционный фильтр, последовательно соединенные интегральный регулятор тока, два интегросумматора и суммирующий усилитель, которые подключены вторым входом к выходу датчика тока, выход суммирующего усилителя подсоединен ко входу преобразователя и к третьему входу второго интегросумматора, а задатчик тока подключен к третьему входу первого интегросумматора непосредственно и к первому входу регулятора тока через инерционный фильтр.
Обратная связь по производной тока в этом электроприводе образуется за счет подключения второго входа суммирующего усилителя к выходу датчика тока. А суммирующий усилитель в совокупности со вторым интегросумматором образуют, в свою очередь, дифференцирующий фильтр.
Данный многоконтурный электропривод с обратной связью по производной тока и тремя обратными связями по току, в отличие от ранее рассмотренного аналога, может обеспечить более высокую динамическую точность регулирования тока. В многоконтурном электроприводе применен принцип управления по отклонению. В частности, по отклонению тока и его производной. А это значит, что отклонение тока и его производной от их требуемых значений всегда будет иметь место. Следовательно, рассматриваемый многоконтурный электропривод тоже не может гарантировать достаточно высокую динамическую точность регулирования тока.
Задача изобретения - повышение динамической точности регулирования тока электропривода.
Решение поставленной задачи достигается тем, что предложен электропривод с управлением по производной тока, содержащий двигатель с датчиком тока, подключенный к выходу преобразователя, последовательно соединенные задатчик тока, инерционный фильтр, регулятор тока, подключенный вторым входом к выходу датчика тока, и первый интегросумматор, второй интегросумматор и первый суммирующий усилитель, подсоединенный первым входом к выходу второго интегросумматора, вторым входом к выходу датчика тока и выходом к первому входу второго интегросумматора, в который введены второй и третий суммирующие усилители, причем второй суммирующий усилитель подключен первым входом к выходу первого интегросумматора, вторым входом к задатчику тока и выходом ко вторым входам обоих интегросумматоров и к первому входу третьего суммирующего усилителя, который подсоединен вторым входом к выходу первого суммирующего усилителя и выходом ко входу преобразователя, а регулятор тока выполнен пропорционально-интегральным.
На чертеже приведена функциональная схема электропривода с управлением по производной тока.
Электропривод с управлением по производной тока содержит двигатель 1 с датчиком 2 тока, подключенный к выходу преобразователя 3, последовательно соединенные задатчик 4 тока, инерционный фильтр 5, пропорционально-интегральный регулятор 6 тока, подключенный вторым входом к выходу датчика 2 тока, и первый интегросумматор 7, второй интегросумматор 8 и первый суммирующий усилитель 9, подсоединенный первым входом к выходу второго интегросумматора 8, вторым входом к выходу датчика 2 тока и выходом к первому входу второго интегросумматора 8, второй и третий суммирующие усилители 10 и 11, причем второй суммирующий усилитель 10 подключен первым входом к выходу первого интегросумматора 7, вторым входом к задатчику 4 тока и выходом ко второму входу обоих интегросумматоров 7 и 8 и к первому входу третьего суммирующего усилителя 11, который подсоединен вторым входом к выходу первого суммирующего усилителя 9 и выходом ко входу преобразователя 3.
Уравнение движения предложенного электропривода имеет вид
(1+τρ)(UФ-UД) = 0, (1)
где τ - постоянный коэффициент;
Uд - выходной сигнал датчика 2 тока;
Uф - выходной сигнал инерционного фильтра 5, уравнению которого
(1+μρ)UФ = UЗ (2)
соответствует вынужденное движение электропривода.
В уравнении (2) обозначены через UЗ выходной сигнал задатчика 4 тока, а через μ - постоянная времени инерционного фильтра 5, значение которой обратно пропорционально граничной частоте его требуемой полосы равномерного пропускания.
Движение предложенного электропривода подчиняется уравнениям (1) и (2) в силу того, что управляющее воздействие в нем формируется по двум независимым каналам и содержит три составляющие, т.е.

где Кn, Кд, Ку - коэффициенты передачи соответственно преобразователя 3, датчика 2 тока и третьего суммирующего усилителя 11 по его второму входу;
σ - постоянный коэффициент; производные выходных сигналов соответственно задатчика 4 тока и датчика 2 тока; Uk- выходной сигнал первого суммирующего усилителя 9, пропорциональный косвенно измеренному возмущению производной тока, которое обусловлено действием собственных обратных связей двигателя; Rя 0,Тя 0 - значения активного сопротивления и постоянной времени цепи якоря двигателя в стационарной точке его номинального режима работы;
производные выходных сигналов соответственно задатчика 4 тока и датчика 2 тока; Uk- выходной сигнал первого суммирующего усилителя 9, пропорциональный косвенно измеренному возмущению производной тока, которое обусловлено действием собственных обратных связей двигателя; Rя 0,Тя 0 - значения активного сопротивления и постоянной времени цепи якоря двигателя в стационарной точке его номинального режима работы;  сигнал, пропорциональный предписанному уравнением (1) закону изменения производной тока, т.е.
сигнал, пропорциональный предписанному уравнением (1) закону изменения производной тока, т.е.

Первая и вторая составляющие управляющего воздействия (3) формируются первым каналом управления по возмущению. Во-первых, за счет прямой связи по производной выходного сигнала задатчика 4 тока, которая реализована путем подключения второго суммирующего усилителя 10 первым входом к выходу первого интегросумматора 7, вторым входом к задатчику 4 тока, а выходом ко второму входу первого интегросумматора 7 непосредственно и ко входу преобразователя 3 через третий суммирующий усилитель 11.
Во-вторых, за счет дифференциальной компенсирующей связи по косвенно измеренному возмущению производной тока электропривода, которая реализована путем подключения первого суммирующего усилителя 9 первым входом через второй интегросумматор 8 к выходу второго суммирующего усилителя 10, вторым входом к выходу датчика 2 тока, а выходом к первому входу второго интегросумматора 8 непосредственно и ко входу преобразователя 3 через третий суммирующий усилитель 11.
Третья составляющая управляющего воздействия (3), пропорциональная интегралу по отклонению производной тока от закона (4), формируется вторым каналом управления по отклонению. Он включает в себя последовательно соединенные задатчик 4 тока, инерционный фильтр 5, пропорционально-интегральный регулятор 6 тока, подключенный вторым входом к выходу датчика 2 тока, первый интегросумматор 7, второй суммирующий усилитель 10, подсоединенный выходом ко второму входу первого интегросумматора 7, и третий суммирующий усилитель 11.
Следовательно, отличительная особенность предложенного электропривода заключается в том, что в нем реализован комбинированный принцип управления по производной тока. Именно за счет этого и достигается повышение динамической точности регулирования тока электропривода.
Электропривод с управлением по производной тока работает следующим образом.
Сигнал задания тока с выхода задатчика 4 тока поступает на второй вход второго суммирующего усилителя 10, который в совокупности с первым интегросумматором 7 образуют первый дифференцирующий фильтр. В результате преобразования сигнала задания тока в этом дифференцирующем фильтре на выходе второго суммирующего усилителя 10 формируется сигнал, пропорциональный заданному значению производной тока. Этот сигнал с выхода второго суммирующего усилителя 10 поступает на второй вход второго интегросумматора 8, который в совокупности с первым суммирующим усилителем 9 образуют второй дифференцирующий фильтр. В то же время на второй вход первого суммирующего усилителя 9 поступает сигнал с выхода датчика 2 тока. Во втором дифференцирующем фильтре этот сигнал преобразуется в сигнал, пропорциональный истинному значению производной тока. А преобразованный сигнал сравнивается с выходным сигналом второго суммирующего усилителя 10. В результате на выходе суммирующего усилителя 9 образуется сигнал, пропорциональный косвенно измеренному возмущению производной тока электропривода. Этот сигнал с выхода первого суммирующего усилителя 9 поступает на второй вход третьего суммирующего усилителя 11, в котором сначала усиливается, а затем суммируется с сигналом, поступающим на первый вход усилителя 11 с выхода второго суммирующего усилителя 10. В результате на выходе третьего суммирующего усилителя 11 формируется сигнал, равный сумме первых двух составляющих управляющего воздействия (3). Этот сигнал с выхода третьего суммирующего усилителя 11 поступает на вход преобразователя 3. И если начальные значения тока и его производной были равны нулю, то преобразователь 3 изменяет напряжение питания цепи якоря двигателя таким образом, что движение электропривода происходит по закону (2).
В этом случае работает только первый канал управления электропривода.
Второй канал управления электропривода вступает в работу тогда, когда начальные значения тока и его производной не являются нулевыми или когда осуществляемая первым каналом управления компенсация возмущения производной тока является не совсем полной. В частности, из-за конечного значения коэффициента усиления Ку третьего суммирующего усилителя 11. В этом случае сигнал задания тока с выхода задатчика 4 тока поступает через инерционный фильтр 5 на первый вход регулятора 6 тока, на второй вход которого поступает выходной сигнал датчика 2 тока. В регуляторе 6 тока его входные сигналы сравниваются между собой и полученный сигнал рассогласования преобразуется по пропорционально-интегральному закону. Сигнал с выхода регулятора 6 тока поступает далее через первый интегросумматор 7, второй и третий суммирующие усилители 10 и 11 на вход преобразователя 3. И преобразователь 3 изменяет напряжение питания цепи якоря двигателя таким образом, что движение электропривода происходит по закону (1).
Таким образом, благодаря введению в электропривод с управлением по производной тока двух дополнительных суммирующих усилителей и выполнению регулятора тока пропорционально-интегральным, обеспечивается повышение динамической точности регулирования его тока.
Источники, принятые во внимание
1. RU, патент, 2095930, кл. Н 02 Р 5/06, 1997.
2. В.С. Елсуков, О.Н. Пятина, М.М. Савин. Синтез регулятора тока для систем подчиненного регулирования электропроводов. //Изв. вузов. Электромеханика, 1996, 5, с. 108.
3. SU, авторское свидетельство, 1552327, кл. Н 02 Р 5/06, 1990.
Изобретение может быть использовано в автоматизированном электроприводе постоянного тока с системами подчиненного регулирования, в которых параметры имеют широкий диапазон изменения. Электропривод с управлением по производной тока содержит двигатель с датчиком тока (2), подключенным к выходу преобразователя (3), последовательно соединенные задатчик (4) тока, инерционный фильтр (5), ПИ-регулятор (6) тока, подключенный вторым входом к выходу датчика (2) тока, и первый интегросумматор (7), второй интегросумматор (8) и три суммирующих усилителя (9-11), причем первый суммирующий усилитель (9) подсоединен первым входом к выходу второго интегросумматора (8), вторым входом к выходу датчика (2) тока и выходом к одному из входов второго интегросумматора (8) и третьего суммирующего усилителя (11), второй суммирующий усилитель (10) подключен первым входом к выходу первого интегросумматора (7), вторым входом к задатчику (4) тока, а выходом к другому входу обоих интегросумматоров (7) и (8) и третьего суммирующего усилителя (11), выход которого подсоединен ко входу преобразователя (3). В результате обеспечивается повышение динамической точности регулирования тока в электроприводе. 1 ил.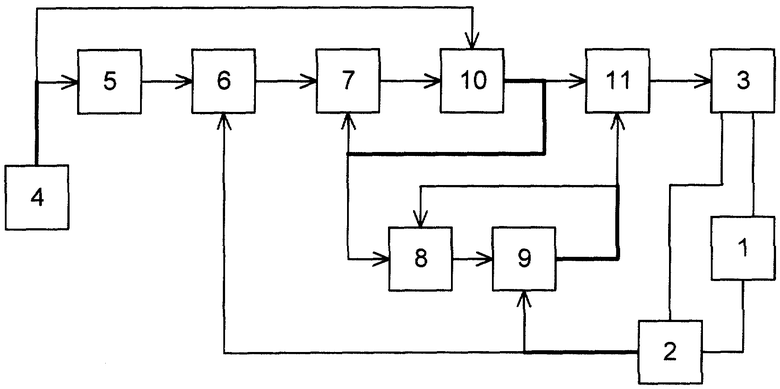
Электропривод с управлением по производной тока, содержащий двигатель с датчиком тока, подключенный к выходу преобразователя, последовательно соединенные задатчик тока, инерционный фильтр, регулятор тока, подключенный вторым входом к выходу датчика тока, и первый интегросумматор, второй интегросумматор и первый суммирующий усилитель, подсоединенный первым входом к выходу второго интегросумматора, вторым входом к выходу датчика тока и выходом к первому входу второго интегросумматора, отличающийся тем, что в него введены второй и третий суммирующие усилители, причем второй суммирующий усилитель подключен первым входом к выходу первого интегросумматора, вторым входом к задатчику тока и выходом ко вторым входам обоих интегросумматоров и к первому входу третьего суммирующего усилителя, который подсоединен вторым входом к выходу первого суммирующего усилителя и выходом ко входу преобразователя, а регулятор тока выполнен пропорционально-интегральным.
| Электропривод | 1988 |
|
SU1552327A1 |
| Электропривод постоянного тока | 1985 |
|
SU1317624A1 |
| Электропривод | 1985 |
|
SU1506503A1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
