Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов, в частности для управления высокоскоростными асинхронными электродвигателями.
Целью изобретения является снижение энергозатрат.
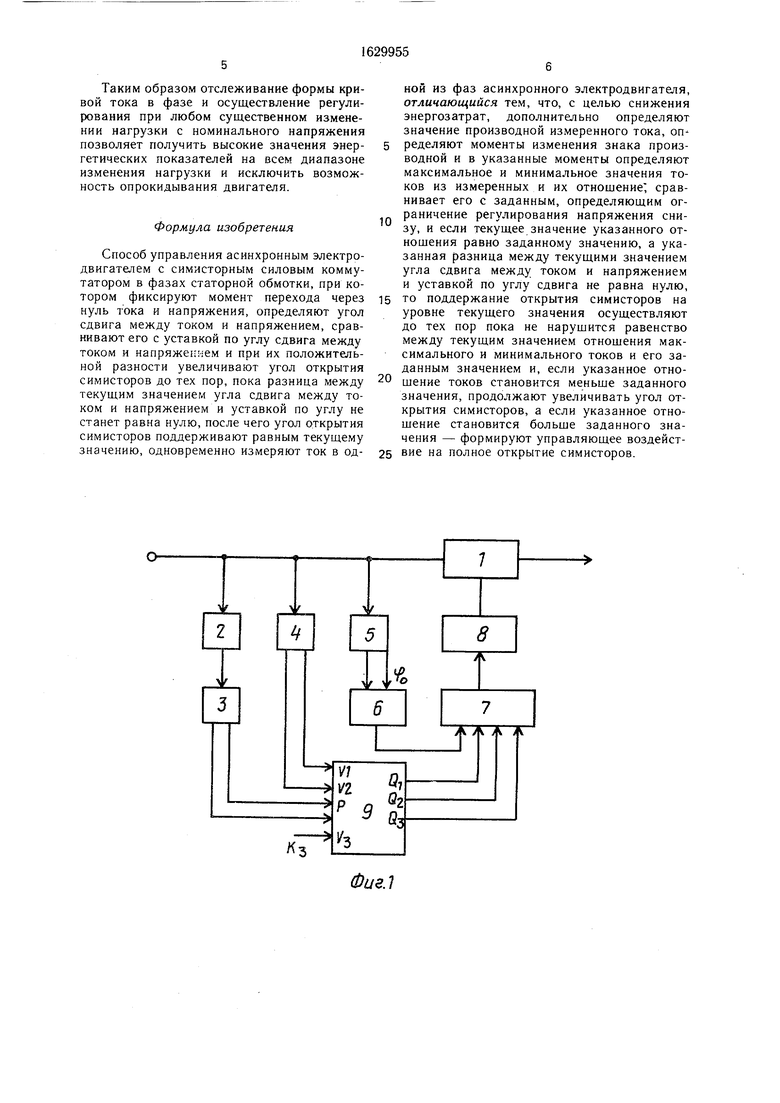
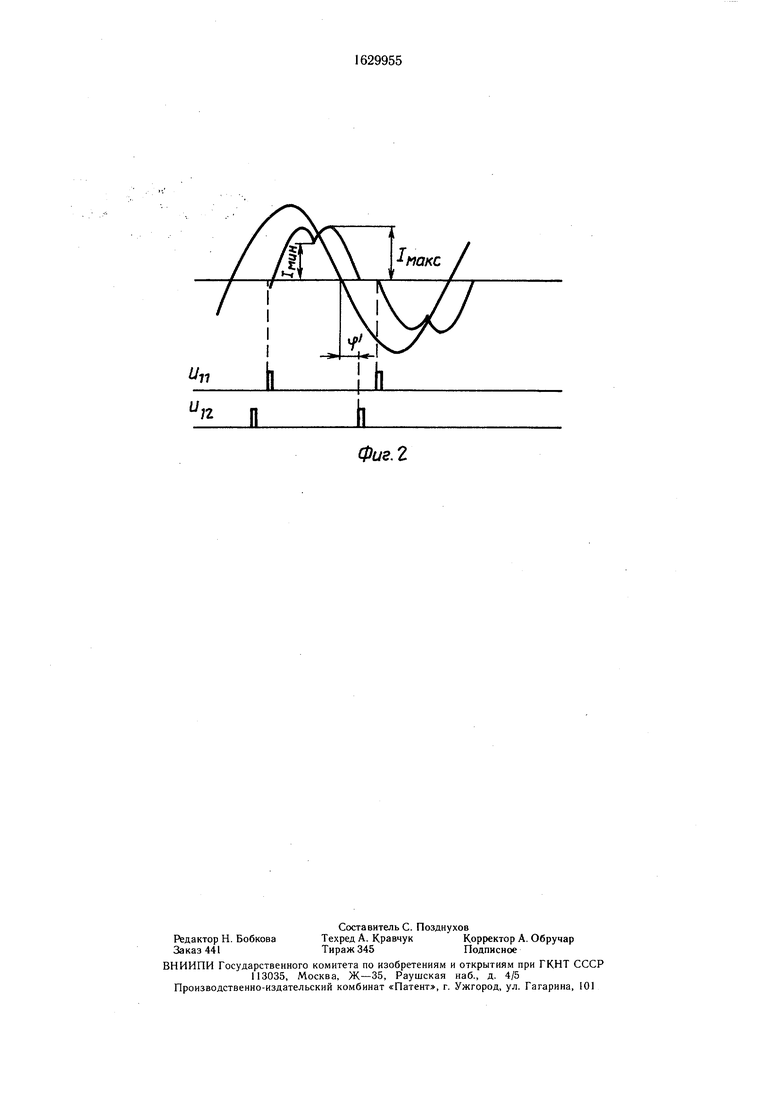
На фиг. 1 показана структурная схема устройства, реализующего способ управления асинхронным электродвигателем; на фиг. 2 - диаграммы тока и напряжения электродвигателя.
Устройство для реализации способа управления электродвигателем содержит силовой симисторный коммутатор 1, датчик 2 тока, цифроаналоговый преобразователь 3, датчик 4 нуля тока с двумя выходами, датчик 5 угла сдвига фаз, блок 6 сравнения, регулятор 7 угла, система 8 импульсно-фа- зового управления, блок 9 вычисления. Входы симисторного коммутатора I соединены с входами датчика 2 тока, датчика 4 нуля тока и датчика 5 угла сдвига фаз и предназначены для подключения к зажимам питающей сети. Выход датчика 2 тока соединен с входом цифроаналогового преобразователя 3, выходы которого соединены с входами данных блока 9 вычисления, стартовый и
о го
со
CD СП
сд
токовый входы которого соединены соответственно с первым и вторым выходами датчика 4 нуля тока. Вход уставки блока 9 вычисления предназначен для подачи сигнала задания отношения токов.
Выход датчика 5 угла сдвига фаз соединен с первым входом блока 6 сравнения, второй вход которого предназначен для подачи сигнала уставки по углу сдвига. Выход блока 6 сравнения соединен с первым входом регулятора 7 угла, второй, третий и четвертый входы которого соединены соответственно с первым, вторым и третьим выходами блока 9 вычисления. Выход регулятора 7 угла соединен с входом системы 8 им- пульсно-фазового управления, выход которой соединен с управляющим входом симисторно- го коммутатора 1, выходы которого предназначены для подключения к зажимам ста- торной обмотки электродвигателя.
Устройство работает следующим образом.
Датчик 2 тока формирует на выходе сигнал, пропорциональный току одной из фаз, который поступает на вход преобразователя 3, на выходе которого формируется «-разрядный цифровой сигнал, соответствующий мгновенному значению фазного тока. Датчик 4 нуля тока вырабатывает на первом выходе импульс всякий раз, когда ток начинает отличаться от нулевого значения (U, фиг. 2), а на втором выходе - импульс всякий раз, когда ток достигает нулевого значения (Uiz, фиг. 2).
Блок 9 вычисления функционирует следующим образом.
При поступлении импульса на стартовый вход V блок 9 начинает циклически считывать п-разрядный цифровой сигнал D и записывать его в последовательные ячейки памяти, находящиеся внутри блока 9 вычисления. Процесс считывания оканчивается при поступлении импульса на стоковый вход V 2. Таким образом в память блока 9 записывается т значений фазного тока, где число т определяется временем работы преобразователя 3. Затем блок 9 «просматривает содержимое памяти и по значениям тока вычисляют производную Д//А/ и запоминаются значения тока /; , соответствующие тем моментам, где меняется знак производной. Далее из всех значений Ј выбираются максимальное /макс и минимальное /мин и вычисляется их отношение ./ //ми. Если вычисленное значение К.Кз, то блок 9 вычисления формирует уровень логической единицы на первом выходе Qi, a на втором QV и третьем Qs выходах - уровни логического нуля. Если , то формируется уровень логической единицы на втором выходе Q2, а на первом Qi и третьем Qa выходах - уровни логического нуля, при формируется уровень логической единицы на третьем выходе Qa, а на первом Qi и втором
Ор выходах - уровни логического нуля, что поясняется таблицей истинности.
0
5
0
5
0
5
0
5
Блок 6 сравнения вырабатывает сигнал, равный разности текущего значения ф угла сдвига между током и напряжением и его заданного значения сро.
Регулятор 7 угла при сигнале логической единицы на цтором входе задает значение угла а открытия снмисторов по сигналу блока 6 сравнения таким образом, что значение /ф-(fo/ становится минимальным. При сигнале логической единицы на третьем входе регулятор 7 угла формирует значение , а при сигнале логической единицы на четвертом входе поддерживает угол управления симисторами постоянным и равным предыдущему значению угла. Система 8 импульсно-фазового управления по значению угла управления а формирует импульсы управления симисторами в моменты времени, соответствующие значению угла а.
Пусть система работает в стационарном режиме и , при этом В этот момент происходит изменение нагрузки, а следовательно, изменение угла ф. Регулятор 7 угла начинает изменять значение угла а, а следовательно, начинает изменяться значение напряжения на двигателе, причем если з процессе регулирования , то блок 9 вычисления формирует уровень логической единицы на первом выходе Qi и регулятор 7 угла реализует заданный закон (ф).
Если в процессе регулирования вычисленное значение К становится больше Кз, то блок 9 вычисления формирует уровень логической единицы на втором выходе Q2, регулятор 7 угла формирует значение угла , напряжение на двигателе становится максимальным, ток в двигателе синусоидальным, значение К. становится меньше Кз и на втором выходе Q2 блока 9 формируется уровень логического нуля, на первом выходе Q: - уровень логической единицы и регулятор 7 угла начинает вновь отрабатывать закон управления (f).
Если в процессе регулирования напряжение на двигателе, а следовательно, и ток станут такими, что выполняется . условие , то блок 9 вычисления формирует уровень логической единицы на третьем выходе Q3 и регулятор 7 угла перестает изменять угол «1 оставляя его постоянным.
Таким образом отслеживание формы кривой тока в фазе и осуществление регулирования при любом существенном изменении нагрузки с номинального напряжения позволяет получить высокие значения энергетических показателей на всем диапазоне изменения нагрузки и исключить возможность опрокидывания двигателя.
Формула изобретения
Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки, при котором фиксируют момент перехода через нуль тока и напряжения, определяют угол сдвига между током и напряжением, сравнивают его с уставкой по углу сдвига между током и напряжением и при их положительной разности увеличивают угол открытия симисторов до тех пор, пока разница между текущим значением угла сдвига между током и напряжением и уставкой по углу не станет равна нулю, после чего угол открытия симисторов поддерживают равным текущему значению, одновременно измеряют ток в од
ной из фаз асинхронного электродвигателя, отличающийся тем, что, с целью снижения энергозатрат, дополнительно определяют значение производной измеренного тока, определяют моменты изменения знака производной и в указанные моменты определяют максимальное и минимальное значения токов из измеренных и их отношение сравнивает его с заданным, определяющим ограничение регулирования напряжения снизу, и если текущее значение указанного отношения равно заданному значению, а указанная разница между текущими значением угла сдвига между током и напряжением и уставкой по углу сдвига не равна нулю, то поддержание открытия симисторов на уровне текущего значения осуществляют до тех пор пока не нарушится равенство между текущим значением отношения максимального и минимального токов и его заданным значением и, если указанное отношение токов становится меньше заданного значения, продолжают увеличивать угол открытия симисторов, а если указанное отношение становится больше заданного значения - формируют управляющее воздейст- 5 вне на полное открытие симисторов.
5
0
Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов, в частности для управления высокоскоростными асинхронными электродвигателями. Целью изобретения является снижение энергозатрат. Способ управления асинхронным электродвигателем заключается в следующем. Определяют угол сдвига между током и напряжением, сравнивают его с уставкой и при их положительной разности увеличивают угол открытия симисторов до тех пор, пока разница между текущим значением угла сдвига и уставкой не станет равна нулю, после чего угол открытия симисторов поддерживают постоянным. Одновременно измеряют ток в одной из фаз электродвигателя, определяют значение производной тока и моменты изменения знака производной. В эти моменты определяют максимальное и минимальное значения токов и их отношение. Сравнивают его с заданным и, если текущее значение отношения равно заданному, а разница между текущим значением угла сдвига и уставкой не равна нулю, то угол открытия симисторов поддерживают постоянным до тех пор, пока не нарушится равенство между измеренным отношением токов и его заданным значением. Если указанное отношение становится меньше заданного, то продолжают увеличивать угол открытия симисторов, а если больше заданного, то формируют команду на полное открытие симисторов. 2 ил., 1 табл. и (Л
Физ.1
U
/2
Фиг. 2
| Сарбатов Р.С., Безаев В.Г | |||
| Опыт эксплуатации регулятора, минимизирующего потери в асинхронном двигателе | |||
| - Электротехническая промышленность, сер | |||
| Электропривод, 1981, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки | 1987 |
|
SU1555795A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
