Изобретение относится к робототехнике и может быть использовано, например, в автоматизированном вакуумном оборудовании по производству изделий микроэлектроники.
Целью изобретения является повышение надежности работы и точности позиционирования манипулятора.
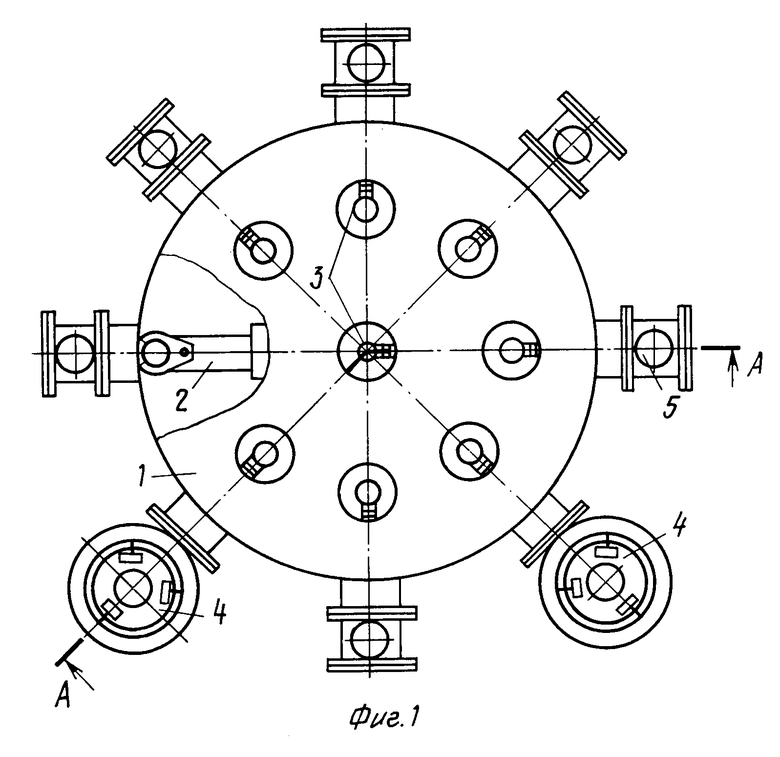
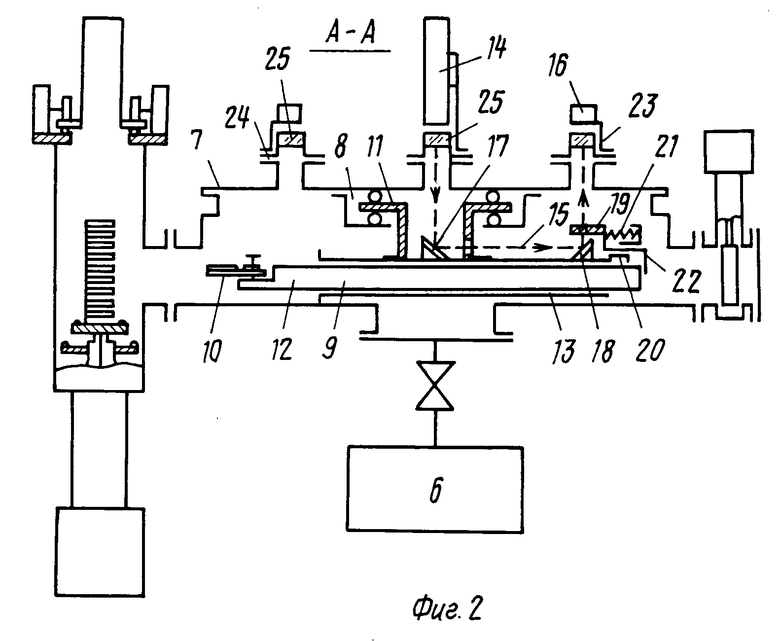
На фиг. 1 показан общий вид устройства; на фиг. 2 - разрез А-А на фиг. 1.
Устройство состоит из вакуумной камеры 1, манипулятора 2, механизма 3 контроля положения манипулятора, шлюзовых механизмов 4 нагрузки и выгрузки изделий, шиберных затворов, средств вакуумирования 6 и системы управления (не показана). Вакуумная камера 1 выполнена, например, в виде цилиндра, на боковой поверхности которого расположены радиальные каналы, перекрываемые шиберными затворами 5 для подсоединения технологических модулей, и каналы для соединения со шлюзовыми механизмами 4 загрузки и выгрузки. На верхнем фланце 7 (фиг. 2) камеры 1 установлены части механизма 3 контроля положения манипулятора 2, а на нижнем - средства для получения и поддержания вакуума в камере. Манипулятор 2 расположен внутри вакуумной камеры и состоит из механизма 8 углового перемещения и механизма 9 линейного перемещения, а также механизма 10 захвата и приводов (на фиг. не показаны).
Механизм 8 углового перемещения состоит из платформы 11, вращающейся относительно центра камеры и соединенной кинематически с приводом (на фиг. не показано).
Механизм 9 линейного перемещения представляет собой ползун 12, перемещающийся в корпусе 13. На переднем конце ползуна установлен механизм 10 захвата. Ползун 12 и механизм 10 захвата кинематически соединены с соответствующими приводами. Корпус 13 жестко соединен с платформой 11.
Механизм 3 контроля положения 2 состоит из источника светового излучения 14, установленного снаружи на вакуумной камере 1, светоотклоняющей оптической системы 15, расположенной на корпусе 13, и приемников светового излучения 16, находящихся снаружи на вакуумной камере 1.
Светоотклоняющая система 15 представляет собой две жестко установленные на корпусе 13 призмы 17 и 18, шторку 19 для перекрытия излучения в зависимости от положения ползуна манипулятора в радиальном направлении. Призма 17 установлена в центре камеры на оси поворота платформы 11, а призма 18 - на конце корпуса 13.
Шторка 19 расположена в направляющих 20 с возможностью перемещения в радиальном направлении и соединена с пружиной 21, которая перемещает шторку к центру камеры. В шторке имеется отверстие для прохождения излучения и рычаг 22, взаимодействующий с ползуном в крайнем исходном положении последнего.
Приемники излучения 16 расположены по окружности на линиях радиальных каналов и закреплены с помощью кронштейнов 23 на фланцах 24. Приемники могут быть выполнены на основе фотодиодов или фоторезисторов.
Для прохождения излучения от источника 14 в камеру 1 и из камеры 1 к приемникам 16 на фланцах 24 установлены герметичные прозрачные окна 25.
В качестве источника излучения используется лазер, имеющий малый угол расхождения и высокую плотность светового пучка.
Шлюзовые механизмы 4 загрузки и выгрузки состоят из кассеты-накопителя с механизмом, камеры, механизма шагового перемещения с клапаном и механизма для фиксации кассеты-накопителя.
Шиберные затворы 5 обеспечивают плотное перекрытие радиальных каналов при проведении операций в технологических модулях.
Устройство работает следующим образом.
При включении устройства излучение от источника 14 проходит через герметичное окно 25 в камеру 1, отражается от призмы 17 и попадает на призму 18. Если шторка 19 не перекрывает линию светового потока, то излучение через герметичное окно 25 поступает на соответствующий приемник излучения 16, который выдает сигнал в систему управления о том, что манипулятор 2 находится в исходном состоянии. Если шторка 19 перекрывает линию светового потока, то подается команда на перемещение ползуна 12 манипулятора 2 в соответствующее крайнее положение. При этом ползун 12 взаимодействует с рычагом 22 шторки 19, перемещая ее до совмещения окна шторки 19 с линией светового потока.
Приемник излучения 16 выдает сигнал о достижении исходного положения ползуном 12, линейное перемещение ползуна 12 прекращается. Подается команда на угловое перемещение, световой поток проходит последовательно через герметичные прозрачные окна 25 и попадает на соответствующие приемники излучения 16.
Согласно заданной программе манипулятор останавливается на одной из линий радиальных каналов. После этого начинается линейное перемещение в камеру технологического модуля или камеру шлюзового механизма. При этом ползун отходит от рычага 22, шторка 19 под действием пружины 21 перемещается и перекрывает прохождение светового потока к приемникам излучения 16, сигнализируя о том, что ползун перемещается в радиальном направлении.
В случае установки предохранительных муфт в кинематике манипулятора, их срабатывание не приводит к сбою в управлении, так как сигнал от датчиков появляется только при установке ползуна в требуемое положение, т.е. привод будет работать до срабатывания датчика независимо от рассогласования углов поворота звеньев кинематической цепи при проскальзывании муфты. Отсутствие сигнала в течение определенного времени свидетельствует о неисправности в манипуляторе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для молекулярно-лучевой эпитаксии | 1984 |
|
SU1231920A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ИЗДЕЛИЙ В ВАКУУМЕ | 1985 |
|
SU1340230A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ | 1992 |
|
RU2034362C1 |
| УСТАНОВКА ИОННО-ПЛАЗМЕННОЙ ОБРАБОТКИ ИЗДЕЛИЙ | 2013 |
|
RU2538708C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МАЛОГАБАРИТНЫХ АТОМНЫХ ЯЧЕЕК С ПАРАМИ АТОМОВ ЩЕЛОЧНЫХ МЕТАЛЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2554358C1 |
| Вакуумный перегрузчик | 1986 |
|
SU1321980A1 |
| Загрузочное устройство шиберного типа | 1985 |
|
SU1275176A1 |
| ВАКУУМНАЯ ИНДУКЦИОННАЯ ПЛАВИЛЬНО-ЗАЛИВОЧНАЯ УСТАНОВКА | 2017 |
|
RU2663025C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ СОВЕРШЕНСТВА СТРУКТУРЫ МОНОКРИСТАЛЛИЧЕСКИХ СЛОЕВ | 2007 |
|
RU2370757C2 |
| Вакуумный комплекс термического отжига полупроводниковых пластин | 2021 |
|
RU2764877C1 |
Изобретение относится к робототехнике и может быть использовано, например, в автоматизированном вакуумном оборудовании по производству изделий микроэлектроники. Целью изобретения является повышение надежности работы и точности позиционирования манипулятора. Это достигается выполнением механизма контроля положения манипулятора, который установлен в вакуумной камере в виде световой оптической системы, имеющей источник излучения, установленный снаружи камеры, две светоотклоняющие призмы, расположенные на манипуляторе, приемники излучения, установленные снаружи камеры в соответствующих местах, а в стенке камеры напротив приемников и источника размещены герметичные прозрачные окна для прохождения светового потока от источника до приемников излучения. При программных перемещениях манипулятора происходит засветка соответствующих приемников излучения, по сигналам которых, поступающим в систему управления, производится контроль положения манипулятора. 2 ил.
РОБОТОТЕХНОЛОГИЧЕСКОЕ УСТРОЙСТВО, содержащее вакуумную камеру со шлюзовыми механизмами загрузки и выгрузки и с шиберными затворами, манипулятор с механизмами его углового и линейного перемещений, установленный внутри камеры, механизм контроля положения манипулятора, систему управления и средства вакуумирования камеры, отличающееся тем, что, с целью повышения надежности работы и точности позиционирования манипулятора, механизм контроля положения манипулятора выполнен в виде светооптической системы, содержащей источник светового излучения, установленный вне камеры на оси вращения манипулятора, две светоотклоняющие призмы, установленные на манипуляторе, шторки, расположенные внутри камеры и имеющие возможность взаимодействия с манипулятором и приемники светового излучения, установленные вне камеры, при этом в стенке камеры напротив источника и приемников светового излучения выполнены герметичные светопрозрачные окна, а источник светового излучения имеет возможность оптической связи посредством светоотклоняющих призм с приемниками светового излучения.
| Установка для молекулярно-лучевой эпитаксии | 1984 |
|
SU1231920A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
