Изобретение относится к вакуумной технике и может быть использовано в устройствах обработки изделий электронной техники методом ионной имплантации, электронной обработки, магнетронного напыления, плазмохимического травления, молекулярной эпитаксии и т. д.
Известно устройство обработки изделий электронной техники (патент Японии N 61-31590, кл. Н 01 J 37/20), содержащее камеру для ионной имплантации, внутри которой вращается плоский диск, расположенный перпендикулярно ионному лучу и перемещающийся возвратно-поступательно в радиальном направлении. Ионный луч бомбардирует поверхность нескольких пластин, расположенных вдоль одной полуокружности диска. Камера состоит из основания и крышки, которые могут приостанавливать вращение диска. Над поверхностью диска расположен другой диск, ось которого совпадает с осью этого диска и выступает наружу через крышку. Ось герметично установлена на крышке и имеет возможность вращения и возвратно-поступательного перемещения в радиальном направлении. В процессе ионной имплантации один диск прижимается к другому и осуществляется одновременное вращение и возвратно-поступательное перемещение обоих дисков. По окончании процесса ионной имплантации диск задерживается основанием, крышка удаляется от основания и между дисками образуется зазор, через который осуществляется замена пластин.
Однако в данном устройстве не обеспечивается достаточный уровень качества обрабатываемых изделий из-за приносимой дефектности на пластине от кинематических пар трений узлов и механизмов.
Известно также устройство обработки изделий электронной техники (патент Японии N 63-40352, кл. Н 01 j 37/317), содержащее вакуумную камеру для ионной имплантации, снабженную отверстием для ввода пучка ионов, с установленным механизмом вращения диска, на котором с возможностью снятия закреплены подложки. Камера соединена через шибер с шлюзом, давление в котором может изменяться от атмосферного до давления в камере и наоборот. Между камерой и шлюзом установлена каретка, на которую помещают диск, осуществляющая возвратно-поступательное движение. Каретка образована рамой, снабженной захватами для фиксации диска по крайней кромке. Рамка окружает диск так, что почти вся его поверхность остается открытой. Между камерой и шлюзом установлены также приспособления для освобождения диска из состояния фиксации.
Недостатки данного технического решения совпадают с недостатками аналога, описанного выше.
Известно также устройство обработки изделий электронной техники (патент США N 4899 059, кл. Н 01 j 37/20), содержащее технологическую камеру с механизмом обработки изделий, камеру перекладки обрабатываемых изделий с одноплечевым манипулятором перекладки и газовую камеру с обрабатываемыми изделиями, расположенными в кассете горизонтально. В процессе перекладки изделий из шлюзовой камеры в технологическую механизм обработки изделий находится в горизонтальном положении.
Однако в этом устройстве также не обеспечивается достаточный уровень качества обрабатываемых изделий и производительность работы устройства не увеличивается за счет длительного времени перекладки обрабатываемых изделий из шлюзовой камеры в технологическую.
Наиболее близким к предлагаемому является устройство обработки изделий электронной техники, включающее технологическую камеру с механизмом обработки изделий, шлюзовую камеру с манипулятором транспортировки и одноплечевой манипулятор перекладки изделий, имеющий схваты в виде пальцевого патрона и привод их перемещения.
Однако в этом устройстве также не обеспечивается достаточный уровень качества обрабатываемых изделий и производительность работы устройства не увеличивается за счет длительного времени перекладки обрабатываемых изделий из шлюзовой камеры в технологическую.
Целью изобретения является повышение производительности и качества обрабатываемых изделий за счет уменьшения приносимой дефектности на пластины.
Для этого в устройстве обработки изделий электронной техники, включающем механизм обработки, шлюзовую камеру с манипулятором транспортировки и манипулятор перекладки изделий, имеющий схваты и привод их перемещения, манипулятор перекладки имеет плечи для одновременного съема-перекладки изделий, схваты которого и привод их перемещения выполнены полыми в виде уплощенной трубки С-образной формы для энергоносителя.
Манипулятор перекладки может быть выполнен в виде кронштейна Z-образной формы с разнесенными на расстоянии плечами.
Известных в науке и технике решений с указанной совокупностью признаков не обнаружено. Результат, полученный у данного технического решения, не достигается в известных решениях. Неизвестно в устройствах обработки изделий электронной техники выполнение манипулятора перекладки в виде кронштейна Z-образной формы с разнесенными на расстоянии плечами для одновременного съема-перекладки изделий, схваты которого и привод их перемещения выполнены полыми в виде уплощенной трубки С-образной формы для энергоносителя.
В устройстве-прототипе используется одноплечевой манипулятор перекладки изделий, который выполняет функции съема и перекладки обрабатываемых изделий из камеры перекладки в технологическую камеру на сканирующий диск. Предлагаемое изобретение позволяет осуществлять одновременно съем и перекладку изделий за счет применения двухплечевого манипулятора, в результате чего уменьшаются габариты устройства. В прототипе устройство захвата обрабатываемых изделий выполнено в виде пальцевого патрона, содержащего кинематические пары трения. В предлагаемом устройстве отсутствуют кинематические пары трения из-за выполнения устройства захвата в виде упругодеформированных полых трубок.
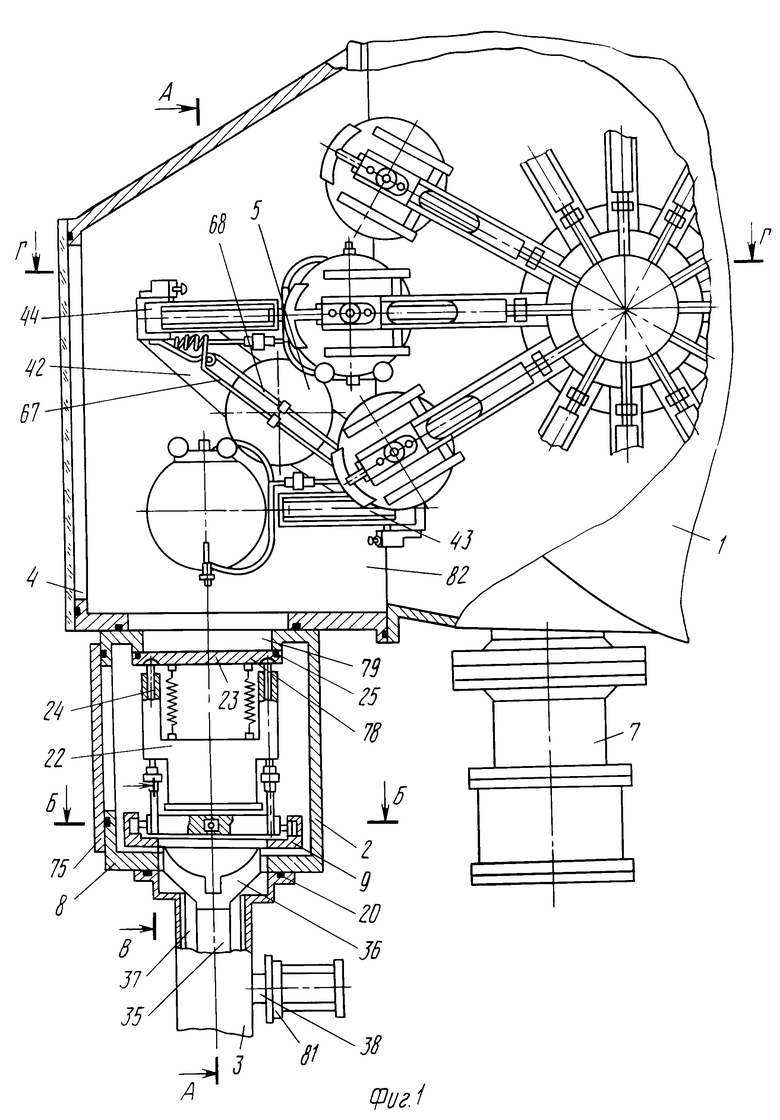
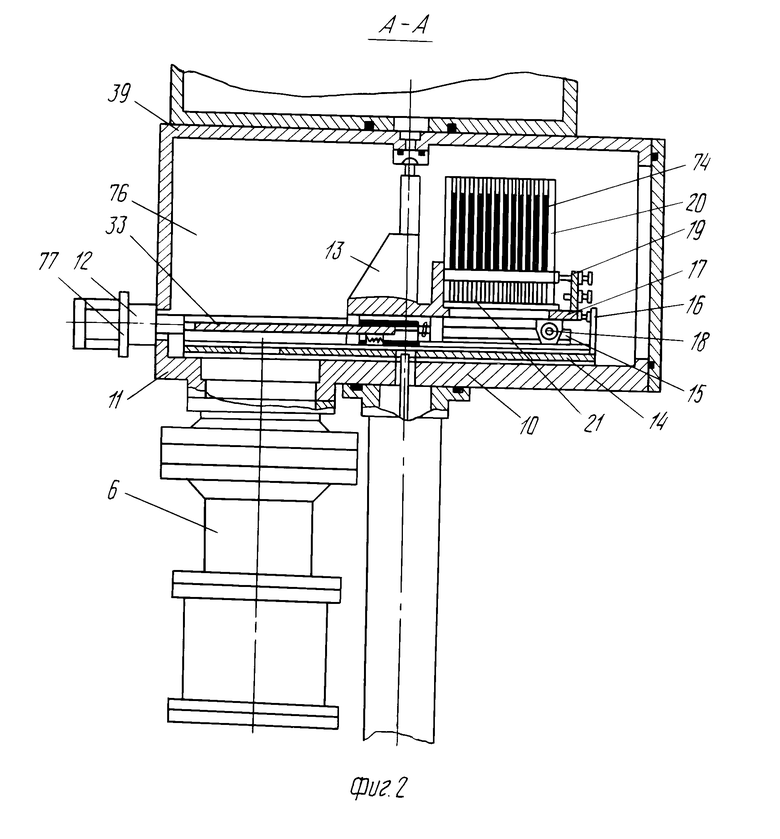
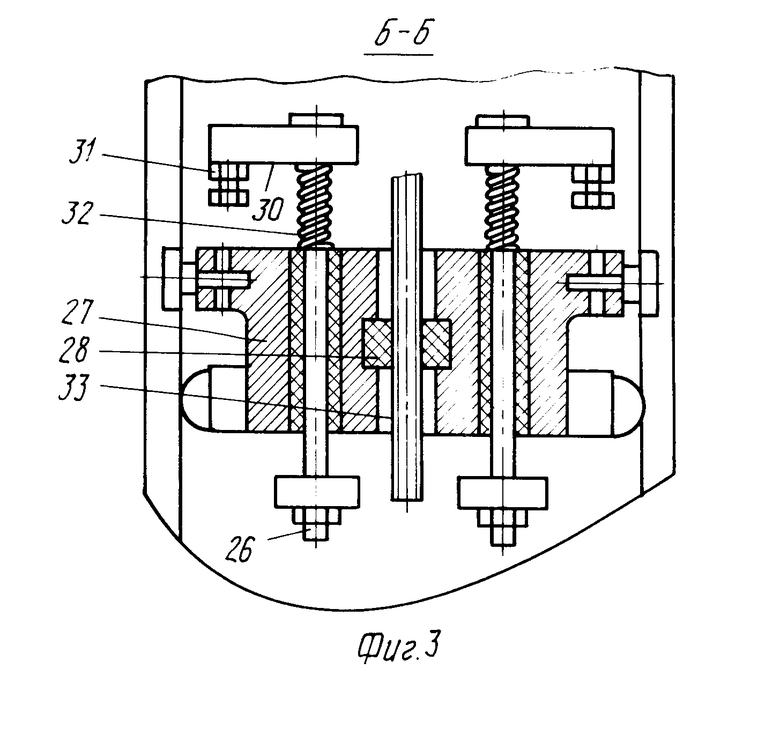
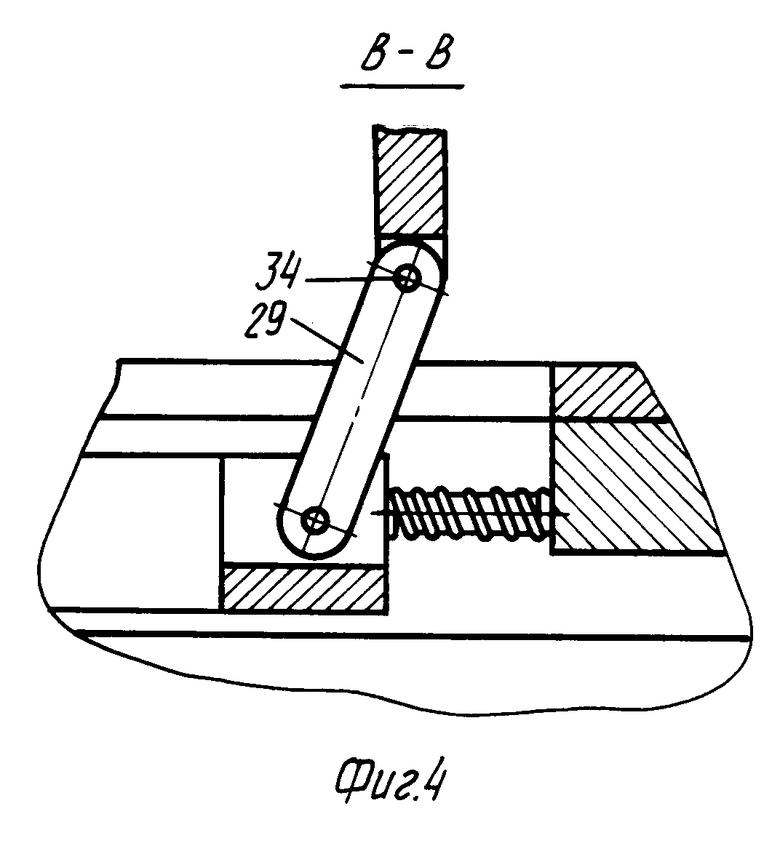
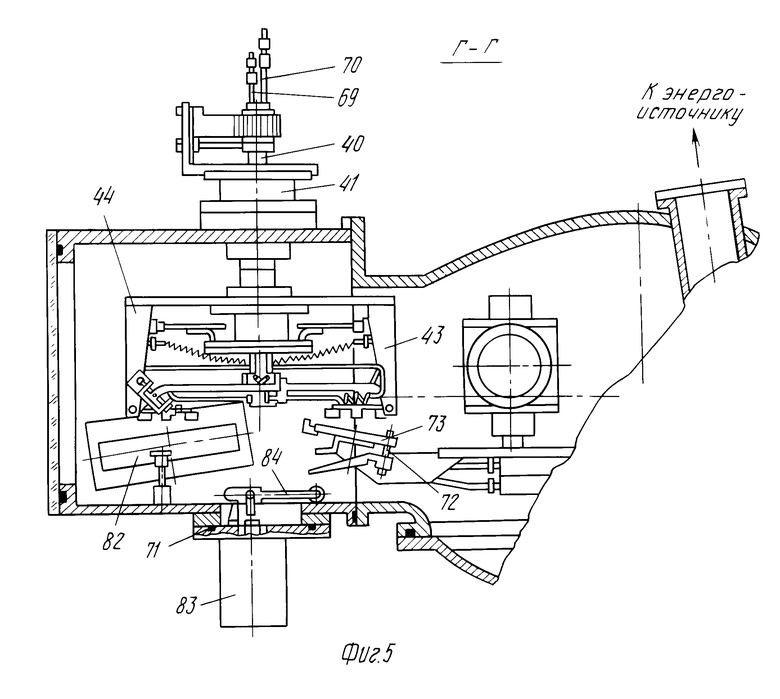
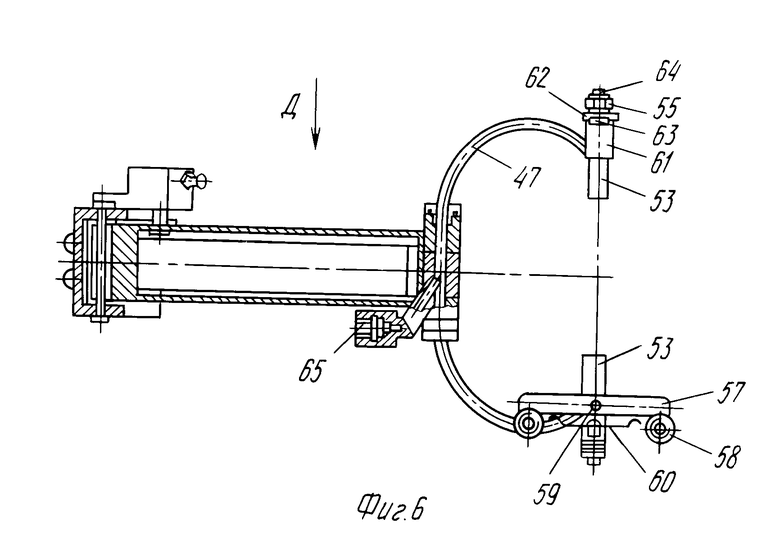
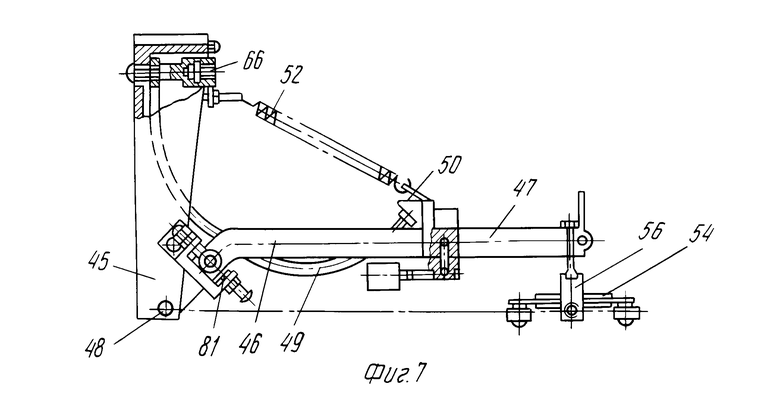
На фиг. 1 показано устройство в поперечном сечении; на фиг. 2 сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 1; на фиг. 4 сечение В-В на фиг. 1; на фиг. 5 сечение Г-Г на фиг. 1; на фиг. 6 плечо манипулятора в поперечном сечении; на фиг. 7 вид Д на фиг. 6.
Устройство обработки изделий электронной техники содержит механизм обработки изделий, помещенный в технологическую камеру 1, связанную с энергоисточником, например ионным источником, шлюзовую камеру 2 с манипулятором 3 транспортировки изделий, камеру 4 перегрузки с манипулятором 5 перекладки изделий, а также средства вакуумной откачки (насосы) 6 и 7. Внутри корпуса 8 шлюзовой камеры размещен механизм 9 перемещения обрабатываемых изделий. На нижней наружной поверхности 10 корпуса 8 установлен манипулятор 3 транспортировки изделий и вакуумный насос 6. На боковой поверхности 11 корпуса 8 установлен привод 12 механизма 9 перемещения изделий и шлюзового затвора 13. Механизм 9 перемещения изделий содержит основание 14 с закругленными на нем направляющими 15 и упорами 16. В направляющих 15 установлена каретка 17, содержащая опоры 18 качения и зажим 19, служащий для фиксации кассеты 20 на платформе 21 каретки 17. На платформе 21 установлен шлюзовой затвор 13, содержащий корпус 22, герметизирующую заслонку 23 со штоками 24 и уплотнитель 25. Под платформой 21 каретки 17 в направляющих 26 установлен ползун 27, содержащий ходовую гайку 28, серьги 29. На поверхности 30 установлены упоры 31, служащие для регулировки хода ползуна 27. Между ползуном и поверхностью 30 в направляющих 26 установлены пружины 32, служащие для предотвращения перемещения каретки 17 при открытии герметизирующей заслонки 23. Ходовая гайка 28 ползуна соединена с винтом 33 привода 12, а серьги 29 посредством осей 34 соединены со штоками 24 герметизирующей заслонки 23.
Манипулятор 3 транспортировки изделий содержит штангу 35 с закрепленным на ней захватом 36. Штанга с захватом установлена в герметичном корпусе 37. На корпусе установлен привод 38 перемещения штанги. На верхней поверхности 39 корпуса 8 шлюзовой камеры установлена камера 4 перегрузки, соединенная герметично с технологической камерой 1. Внутри камеры перегрузки установлен манипулятор 5 перекладки обрабатываемых изделий и закреплен на валу 40 привода 41 поворота манипулятора.
Манипулятор перекладки содержит траверсу 42, на которой установлены Z-образно плечи 43 и 44. Плечо манипулятора содержит опору 45, рычаг 46 с закрепленными на нем схватами 47. Опора 45 и рычаг 46 соединены между собой осью 48, которая является также и центром поворота рычага 46. На опоре 45 установлен привод 49, соединенный с рычагом 46 поводком 50 и служащий для углового перемещения рычага и схватов 47. Угол перемещения рычага регулируется упорами и пружиной 52. Конструктивно схваты 47 и привод 49 представляют собой герметичные упругодеформируемые полые трубки уплощенной С-образной формы. Для захвата и удержания обрабатываемых изделий в направляющих 53 схватов установлены зажимы 54 и 55. При использовании разного типа и размеров обрабатываемых изделий предусмотрена регулировка зажимов в направляющих 53. Зажим 54 содержит кронштейны 56, планку 57 с закрепленными на ней эластомерными роликами 58. Планка 57 подвижно соединена с кронштейном 56 посредством оси 59. На кронштейне установлена пружина 60, контактирующая с планкой 57. Зажим 55 содержит кронштейн 61, пяту 62 с эластомерным вкладышем 63. Пята подвижно соединена с кронштейном посредством оси 64. Схваты 47 и привод 49 снабжены герметичными каналами 65 и 66, предназначенными для подачи в них энергоносителя, например сжатого воздуха. Каналы схватов и приводов схватов плеч манипулятора соединены между собой соответственно воздуховодами 67 и 68, которые соединены с трубопроводами 69 и 70, размещенными в пустотелом валу 40. На боковой поверхности камеры 4 перегрузки установлен механизм 71 перемещения упоров, предназначенный для отвода-подвода упоров 72, расположенных на держателе 73 обрабатываемых изделий. Упоры 72 предназначены для удержания обрабатываемых изделий на держателе 73 в момент их загрузки-выгрузки.
Устройство работает следующим образом.
Кассета 20 с обрабатываемыми изделиями 74 устанавливается в шлюзовую камеру 2 на платформе 21 каретки 17 и фиксируется зажимом 19. Шлюзовая камера закрывается крышкой 75 и производится откачка вакуумным насосом 6 объема камеры 76, после чего включается двигатель 77 вращения ходового винта 33. В начальный момент вращения ходового винта приходит в движение ползун 27, при этом каретка 17 остается неподвижной. При движении ползуна серьги 29 начинают перемещаться из своего начального положения, при котором герметизирующая заслонка 23 посредством штоков 24 прижата к уплотняющей поверхности 78 шлюзового отверстия 79 в положение, при котором заслонка 23 отведена от поверхности 78, образуя при этом зазор между поверхностью 78 и уплотнителем 25. При дальнейшем вращении ходового винта 33 начинает перемещаться каретка 17 с кассетой 20. Движение каретки продолжается до тех пор, пока изделие 74, установленное в кассете, не займет позицию, соосную с шлюзовым отверстием 79 и проходным отверстием. После этого двигатель 77 выключается. Такое положение каретки позволяет шлюзовому затвору 13 полностью освободить шлюзовое отверстие 79, а также является исходным для перегрузки изделий 74 из шлюзовой камеры в камеру 4 перегрузки. После этого включается двигатель 81 привода 38 перемещения штанги 35. При перемещении штанги из крайнего нижнего положения ее захват 36 проходит через проходное отверстие и вводится в изделие 74, переносит его из кассеты через шлюзовое отверстие 79 в зону 82 схвата манипулятора 5 перекладки изделий, после чего двигатель 81 выключается. После обработки изделий в технологической камере 1 через трубопроводы 69 и 70 подается сжатый воздух в схваты 47 и с временной задержкой в привод 49 перемещения схватов. Схваты 47 разжимаются. После этого схваты плеча 43 манипулятора подводятся в зону 82 схвата, а схваты плеча 44 к держателю 73 изделий.
После этого подача сжатого воздуха в трубопровод 69 прекращается, схваты 47 сжимаются и зажимы 54 и 55 удерживают изделие 74 соответственно одно в захвате 36, другое в держателе 73. Затем включается привод 83 механизма 71 перемещения упоров и его рычаг 84 перемещения отводит упоры 72 держателя 73 от изделия. После чего включается двигатель 81 и захват 36 штанги 35 без изделия 74 перемещается из зоны 82 схвата в крайнее нижнее положение, двигатель 81 выключается и прекращается подача сжатого воздуха в трубопровод 70, после чего плечо 43 манипулятора с необработанным изделием отводится из зоны схвата, а плечо 44 с обработанным изделием от держателя 73. Далее включается привод 41 поворота манипулятора и плечи 43 и 44 совершают поворот на 180о. Затем через трубопровод 70 подается сжатый воздух в привод 49 схватов, после чего плечо 44 подводится в зону 82 схвата, а плечо 43 к держателю 73. Включается двигатель 81, захват 36 без изделия перемещается из крайнего нижнего положения в зону схвата и вводится в обработанное изделие 74. После чего двигатель 81 и привод 83 механизма перемещения упоров выключаются. При выключенном приводе 83 происходит подвод упоров 72 к изделию и его фиксация на держателе 73. Через трубопровод 69 подается сжатый воздух в схваты 47. Схваты разжимаются. Подача воздуха в привод 49 прекращается, и плечи 44 и 43 отводятся соответственно одно из зоны схвата, другое от держателя 73. Включается двигатель 81 и обработанное изделие переносится захватом 36 из зоны схвата в кассету 20 на место взятого необработанного изделия. Двигатель 81 выключается.
Операция загрузки-выгрузки одной пары изделий, таким образом, заканчивается. Затем включается двигатель 77 вращения винта 33. При вращении винта начинает перемещаться каретка с кассетой 20. Движение каретки продолжается до тех пор, пока следующее необработанное изделие, установленное в кассете, не займет позицию, соосную с шлюзовым отверстием 79 и проходным отверстием. Двигатель 77 выключается. Далее следует повторение переходов, описанных выше.
После завершения обработки и перегрузки изделий двигатель 77 реверсивным движением перемещает каретку 17 с кассетой 20 до упоров 16. При дальнейшем вращении винта приходит в движение ползун 27 и с обратной последовательностью открытию, происходит закрытие шлюзового отверстия 79 заслонкой 23. Двигатель 77 выключается. Затем в шлюзовую камеру производится напуск атмосферы или сухого азота. Открывается крышка 75 шлюзовой камеры, отводится зажим 19 и кассета с обработанными изделиями снимается с платформы 21 и вынимается из шлюзовой камеры.
П р и м е р. Устройство содержит все узлы и детали, названные выше. Механизм обработки в данном варианте устройства содержит сканирующий диск, держатель изделий с нанесенным эластомером. Захват манипулятора транспортировки изделий изготовлен из полиамида. Схваты и привод схватов плеча манипулятора перекладки изделий изготовлены из стали марки 36ИХТ10. Зажимы схватов изготовлены из резины типа ИРП-1345. Зажим обрабатываемого изделия в манипуляторе перекладки осуществляется в трех точках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство шиберного типа | 1985 |
|
SU1275176A1 |
| УСТАНОВКА ИОННО-ПЛАЗМЕННОЙ ОБРАБОТКИ ИЗДЕЛИЙ | 2013 |
|
RU2538708C2 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ИНДИВИДУАЛЬНОЙ ОБРАБОТКИ ПОДЛОЖЕК КВАДРАТНОЙ ИЛИ ПРЯМОУГОЛЬНОЙ ФОРМЫ | 2007 |
|
RU2367526C2 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ОБРАБОТКИ ПЛАСТИН, НАПРИМЕР ФОТОШАБЛОНОВ | 2006 |
|
RU2328054C1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Вакуумный комплекс термического отжига полупроводниковых пластин | 2021 |
|
RU2764877C1 |
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| УСТАНОВКА ДЛЯ ДВУСТОРОННЕЙ ФИНИШНОЙ ОБРАБОТКИ ПОВЕРХНОСТИ ИНТРАОКУЛЯРНЫХ ЛИНЗ | 2014 |
|
RU2585010C1 |
| Вакуумный перегрузчик | 1986 |
|
SU1321980A1 |
Использование: изобретение относится к вакуумной технике и может быть использовано в устройствах обработки изделий электронной техники методом ионной имплантации, электронной обработки, магнетронного напыления и т. д. Сущность изобретения: в устройстве обработки изделий электронной техники, включающем механизм обработки, шлюзовую камеру с манипулятором транспортировки, и манипулятор перекладки изделий, имеющий схваты и привод их перемещения, манипулятор перекладки имеет плечи для одновременного съема-перекладки изделий, схваты которого и привод их перемещения выполнены полыми в виде уплощенной трубки С-образной формы для энергоносителя. Манипулятор перекладки может быть выполнен в виде кронштейна Z-образной формы с разнесенными на расстоянии плечами. 1 з.п. ф-лы, 7 ил.
| Патент США N 4776744, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
