Изобретение относится к обработке изделий в вакууме, а именно к шлюзовым устройствам для загрузки и выгрузки изделий без разгерметизации рабочей камеры, и может быть использовано в производстве изделий электронной техники.
Целью изобретения является упрощение конструкции и повышение надежности в работе за счет обеспечения разгерметизации затворов и перемещения изделий от одного привода.
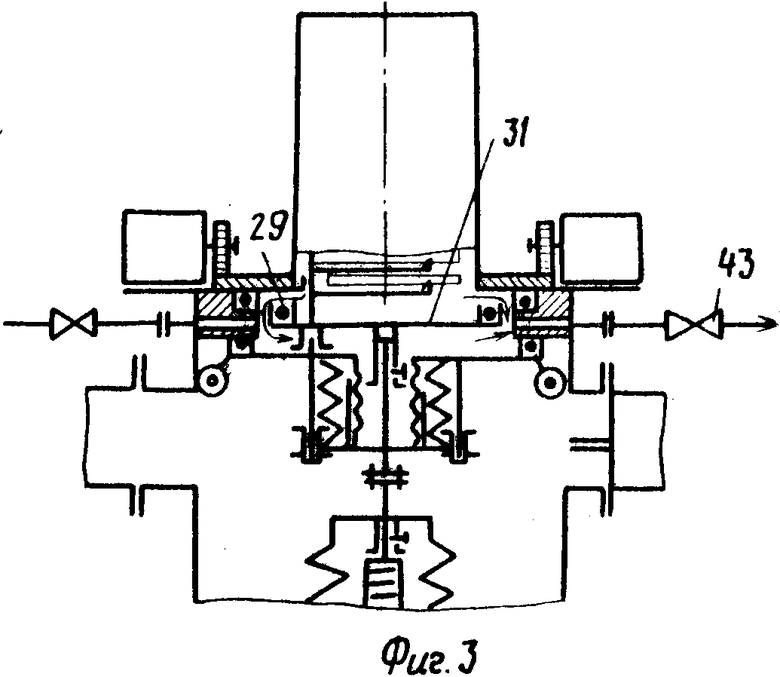
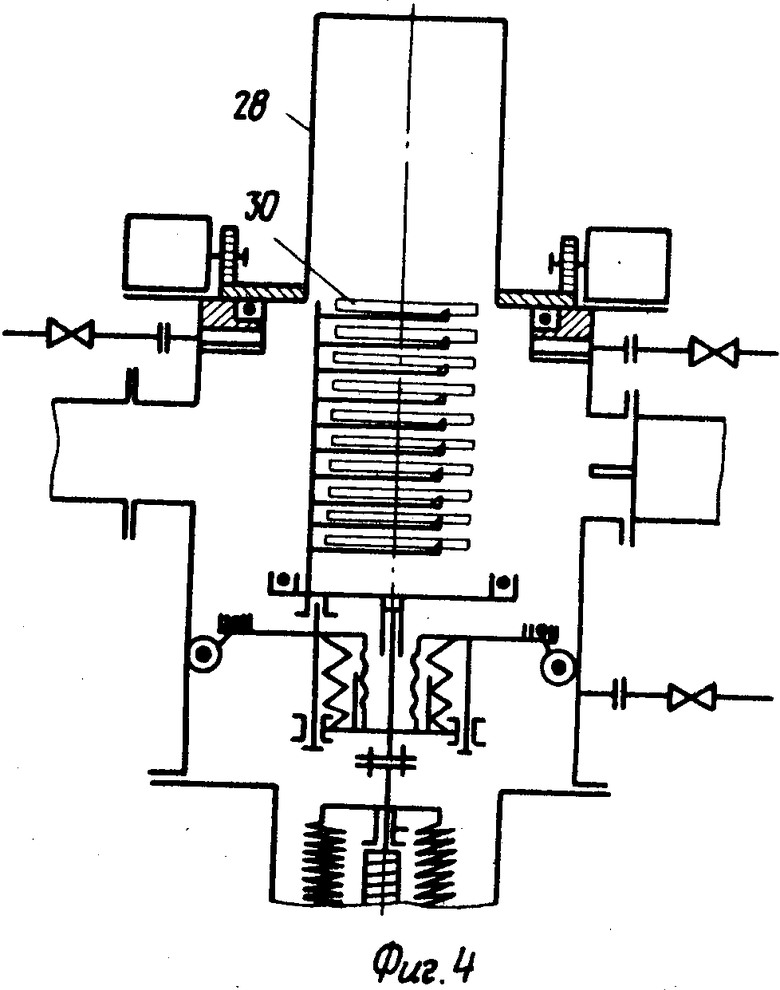
На фиг. 1 показана принципиальная схема устройства, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - расположение элементов конструкции устройства при откачке объема шлюзовой камеры; на фиг. 4 - то же, при перемещении изделий в рабочую камеру.
Устройство состоит из вакуумной рабочей камеры 1, затвора с фланцем 2, механизма шагового перемещения 3, подложкодержателей 4, механизма герметизации 5 и передающего манипулятора 6.
В верхней части корпуса вакуумной камеры 1 расположено входное окно 7, на котором имеется уплотнение 8 и установлен механизм герметизации 5.
В нижней части корпуса вакуумной камеры 1 расположен механизм шагового перемещения 3. Фланец 2 является элементом затвора и предназначен для герметизации входного окна 7 камеры 1 и представляет собой плоское кольцо, к которому крепятся три центрирующих ролика 9, а на верхней плоскости кольца размещено уплотнение 10.
Через отверстие в плоском кольце фланца 2 проходит шток 11, который герметично соединен с ним посредством сильфона 12.
Со штоком 11 жестко связана заглушка 13, на которой установлены пружины 14, обеспечивающие поджатие фланца 2 вверх.
На заглушке 13 имеются три отверстия, через которые проходят направляющие 15, жестко связанные с фланцем 2 и ограничивающие степень поджатия пружин 14.
Механизм шагового перемещения 3 осуществляет движение фланца 2 вверх и вниз, он включает в себя винт 16, роликовую гайку 17, привод 18, сильфонный ввод движения 19.
Штоки 11 и винт 16 соединены между собой через сильфонный ввод движения 19 с помощью замка 20. Винт 16 соединен с роликовой гайкой 17, состоящей из трех центрирующих приводных резьбовых роликов 21 на общем водиле, являющемся остальной частью привода 18.
Винт 16 выполнен пустотелым для размещения фиксирующего устройства 22, исключающего вращение винта 16 вокруг собственной оси.
Фиксирующее устройство 22 связано с датчиками 23 и 24 линейного перемещения. Роликовая гайка 17 непосредственно связана с датчиком 25 углового положения.
Привод 18 состоит из червячного редуктора 26 и электродвигателя 27.
Шлюзовая камера состоит из герметичного корпуса 28 с уплотнением 29 магазина 30 подложкодержателей 4, закрепленного на фланце 31 в виде диска.
По наружному диаметру фланца корпуса 28 шлюзовой камеры имеется три паза 32, через которые свободно проходят ролики 33, а на верхней поверхности фланца корпуса 28 имеются три скоса 34.
Герметичный фланец 31 снизу имеет фиксатор 35, обеспечивающий быстросъемное соединение со штоком 11.
Механизм герметизации 5 состоит из кольца 36, жестко соединенного с колесом 37 червячной передачи редуктора, электродвигателя 38 и датчиков 39, 40 положения.
Кольцо 36 имеет три прижимных ролика 33, взаимодействующие с фланцем корпуса 28. Датчики положения 39, 40 срабатывают от упора 41, кинематически связанного с кольцом 36 и контролируют угловые положения роликов 33.
Подсоединение вакуумной камеры 1 устройства к средствам вакуумирования осуществляется с помощью клапана 42, а объема между затворами корпусов камер 1 и 2 с помощью клапана 43. Клапан 44 служит для напуска азота в промежуток между этими камерами.
Передающий манипулятор 6 подсоединен к вакуумной камере 1, обеспечивает съем и перемещение подложкодержателя 4 с подложкой 45 из магазина 30 и возврат в магазин после окончания технологического процесса.
Устройство работает следующим образом.
В исходном положении входное окно 7 вакуумной камеры 1 герметично закрыто снизу фланцем 2 посредством уплотнения 10, в камере 1 поддерживается вакуум за счет откачки через клапан 42. Это положение механизма шагового перемещения 3 и фланца 2 контролируется датчиком 24.
Механизм герметизации 5 также находится в исходном положении, что контролирует датчик 40.
Подложкодержатели 4 устанавливаются на фланец 31 верхнего окна 7 сверху камеры 1, с ориентацией в угловом положении по пазам во фланце корпуса 28 относительно роликов 33.
По команде включается электродвигатель 38 через редуктор, движение передается колесу 37 и кольцу 36, которое перемещает ролики 33 по скосам фланца корпуса 28, тем самым поджимает фланец к плоскости входного окна 7 и обеспечивает за счет уплотнения 8 герметизацию кассеты-накопителя.
При этом образуется полость с атмосферным давлением (объем, заключенный между затворами, т.е. между фланцем 31). Окончание герметизации подложкодержателей 4 контролируется датчиком 39 положения. После этого открывается клапан 43 и откачными средствами производят вакуумирование полости, а при достижении требуемого вакуума подается команда на захват (фиксацию) фланца 31 штоком 11, для чего включается механизм шагового перемещения вверх на заданное расстояние, определяемое датчиком 23. При этом движение от электродвигателя 27 через редуктор 26, роликовую гайку 17, винт 16 передается штоку 11, заглушке 13, которая сжимает пружины 14, совершая перемещение относительно плоского кольца фланца 2, вследствие чего происходит соединение его с фланцем 31 посредством фиксатора 35.
Последующая операция - разгерметизация корпуса 28 шлюзовой камеры осуществляется путем включения механизма шагового перемещения 3 вниз.
Движение винта 16 вниз, связанного со штоком 11, происходит при неподвижном положении фланца 2 за счет деформации пружин 14 на величину хода заглушки 13, ограниченного фиксаторами 35 и контролируемого датчиком 24. При совершении этого движения объем рабочей камеры 1 в зоне входного окна 7 остается герметизированным фланцем 2 за счет предварительного поджатия пружин 14, а фланец 31 опускается вниз, образуя зазор между уплотнением 29 и корпусом 28, объем корпуса 28 соединяется с полостью и производится их вакуумирование через клапан 43.
При достижении заданной величины вакуума по команде "перегрузка" включается механизм шагового перемещения 3 и фланец 31 с магазином 30 опускается вниз, при этом точный отсчет его движения производится посредством следящей системы с использованием датчика 25 углового положения.
Перемещение магазина 30 осуществляется по цепочке: электродвигатель 27, редуктор 26 привода, роликовая гайка 17, винт 16, фиксатор 35 и фланец 31. Контроль перемещения магазина 30 внутрь камеры 1 на позицию перегрузки каждой подложки на передающий манипулятор осуществляется посредством датчика 25.
В положении магазина 30 (фиг. 4) производится перегрузка подложек 45 на передающий манипулятор 6. Для перегрузки каждой последующей подложки 45 производится перемещение магазина на величину, равную шагу, с которым расположены подложки 45 в магазине 30. Это перемещение осуществляется от электродвигателя 27 с контролем положения датчиком 25.
С помощью передающего манипулятора 6 подложки 45 передаются в технологическую камеру и обратно.
Выгрузка кассеты-накопителя производится в обратном порядке.
Таким образом, вручную производится только установка магазина подложкодержателей на фланец входного окна, остальные операции, включая герметичное подсоединение корпуса шлюзовой камеры к входному окну, откачку объема полости между затворами шлюзовой и рабочей камер, вакуумирование шлюзовой камеры, перемещение подложек на позицию передачи и передачу подложки в вакуумную рабочую камеру выполняются автоматически.
Это повышает производительность сверхвысоковакуумного оборудования и улучшает условия его обслуживания.
Возможность разгерметизации шлюзовой камеры без нарушения герметичности рабочей камеры за счет гибкого герметичного соединения штока с фланцем затвора посредством сильфона позволяет загружать кассеты и снимать их в загерметизированном состоянии. Такое решение обеспечивает возможность производить транспортирование и хранение подложек вне оборудования под вакуумом без выноса на атмосферу, что повышает производительность оборудования и качество изделий электронной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для молекулярно-лучевой эпитаксии | 1984 |
|
SU1231920A1 |
| Вакуумный перегрузчик | 1986 |
|
SU1321980A1 |
| Загрузочное устройство шиберного типа | 1985 |
|
SU1275176A1 |
| УСТРОЙСТВО ОСАЖДЕНИЯ СЛОЕВ ИЗ ГАЗОВОЙ ФАЗЫ | 1991 |
|
RU2014670C1 |
| Вакуумная установка | 1980 |
|
SU901356A1 |
| Устройство для плазмохимического осаждения алмазных покрытий | 2020 |
|
RU2763713C1 |
| ВАКУУМНАЯ УСТАНОВКА | 1983 |
|
SU1153578A2 |
| РОБОТОТЕХНОЛОГИЧЕСКОЕ УСТРОЙСТВО | 1988 |
|
SU1552514A1 |
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Загрузочное устройство шиберного типа | 1982 |
|
SU1060851A1 |

Изобретение относится к обработке изделий в вакууме. Цель изобретения - упрощение конструкции и повышение надежности его работы. Для перемещения магазина 30 подложкодержателей 4 из шлюзовой камеры в рабочую камеру (РК) 1 фланец (Ф) 31 поджимается к плоскости входного окна 7. При этом между Ф 2 и Ф 31 образуется полость с атмосферным давлением. После вакуумирования указанной полости шток 11 механизма 3 шагового перемещения захватывает Ф 31 и посредством фиксатора 35 происходит соединение Ф 31 с Ф 2. Корпус (К) 28 шлюзовой камеры разгерметизируется. Ф 31, с закрепленным на нем магазином 30, опускается вниз, образуя зазор между уплотнением 29 и К 28. Ф 2 при этом остается на месте. После вакуумирования К 28 посредством механизма 3 шагового перемещения магазин 30 и Ф 31 опускаются в РК 1. Здесь передающий манипулятор 6 осуществляет перегрузку подложек в технологическую камеру и обратно. Выполнение Ф 2 в виде плоского кольца и оснащение его подпружиненным сильфоном 12, а Ф 31 в виде диска с фиксатором 35, а также размещение штока 11 РК 1 соосно фиксатору 35 и герметичное соединение его с сильфоном 12 обеспечивает возможность разгерметизации К 28 без нарушения герметичности в РК 1. Таким образом вручную производится только установка магазина 30 подложкодержателей на Ф 31 входного окна 7. Остальные операции выполняются автоматически. 4 ил.
УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ИЗДЕЛИЙ В ВАКУУМЕ, содержащее рабочую и шлюзовую камеры, затворы с герметичными фланцами, расположенными между камерами, подложкодержатель и шток возвратно-поступательного перемещения с приводом, отличающееся тем, что, с целью упрощения конструкции и повышения надежности в работе за счет обеспечения разгерметизации затворов и перемещения изделий от одного привода, фланец, расположенный со стороны рабочей камеры, выполнен в виде плоского кольца и снабжен подпружиненным сильфоном, размещенным соосно отверстию кольца и герметично соединенным с его поверхностью, а другой фланец выполнен в виде диска и снабжен фиксатором, закрепленным соосно штоку со стороны рабочей камеры, при этом шток размещен в рабочей камере и герметично соединен с сильфоном с возможностью зацепления с фиксатором, а подложкодержатель закреплен на фланце в виде диска со стороны шлюзовой камеры.
| ВАКУУМНАЯ НАПЫЛИТЕЛЬНАЯ УСТАНОВКА | 0 |
|
SU322421A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
