Изобретение относится к трубопроводной арматуре, в частности к устройствам высоковакуумной аппаратуры, и предназначено для загрузки, выгруэ ки деталей из атмосферы в вакуум и обратно, создания задела деталей типа прдложкодержателей для транспортирования 3 вакууме и извлечения эа- Йела из вакуума для последующей обработки без разгерметизации вакуумных объемов и быстродействующих автоматически управляемых вакуумных установках специального технологического назначения в крупносерийном и массовом производстве изделий электронной и других отраслей промьтоленности.
Цель изобретения - расширение тех HonorH iecKHX возможностей, повышение производительности и качества обрабо К.И деталей-подложек за счет совмещения операций их перегрузки из атмосферы в технологическую камеру, в накопитель и обратно.
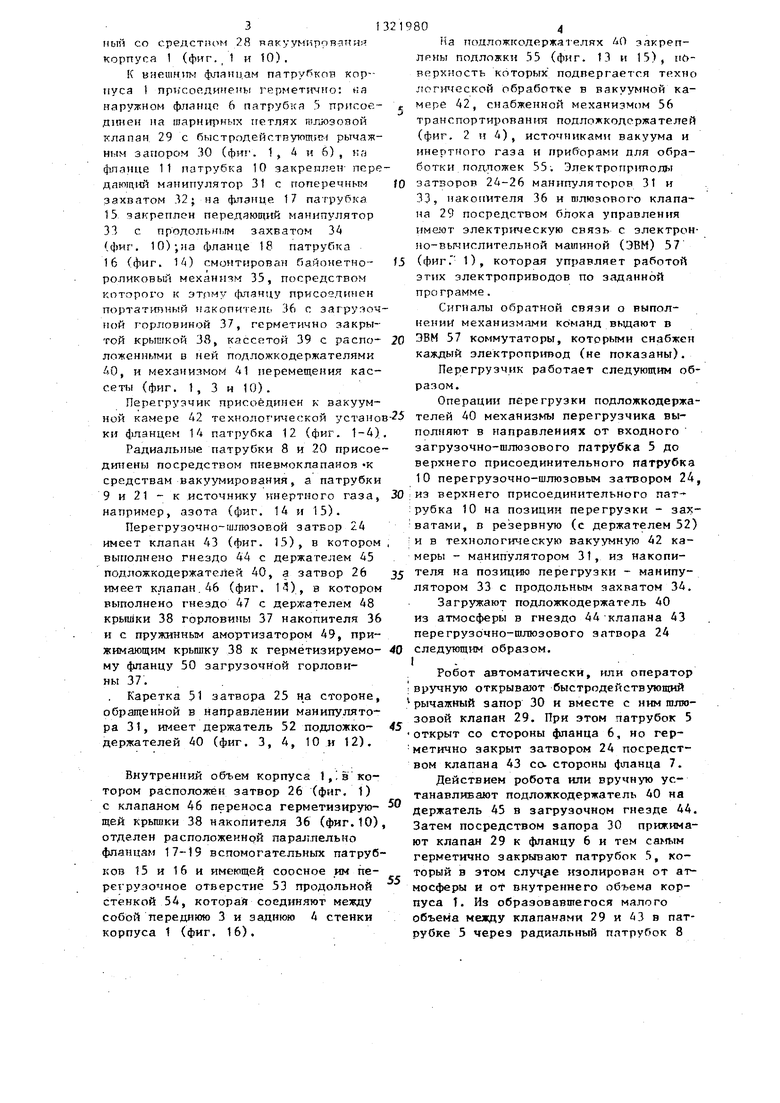
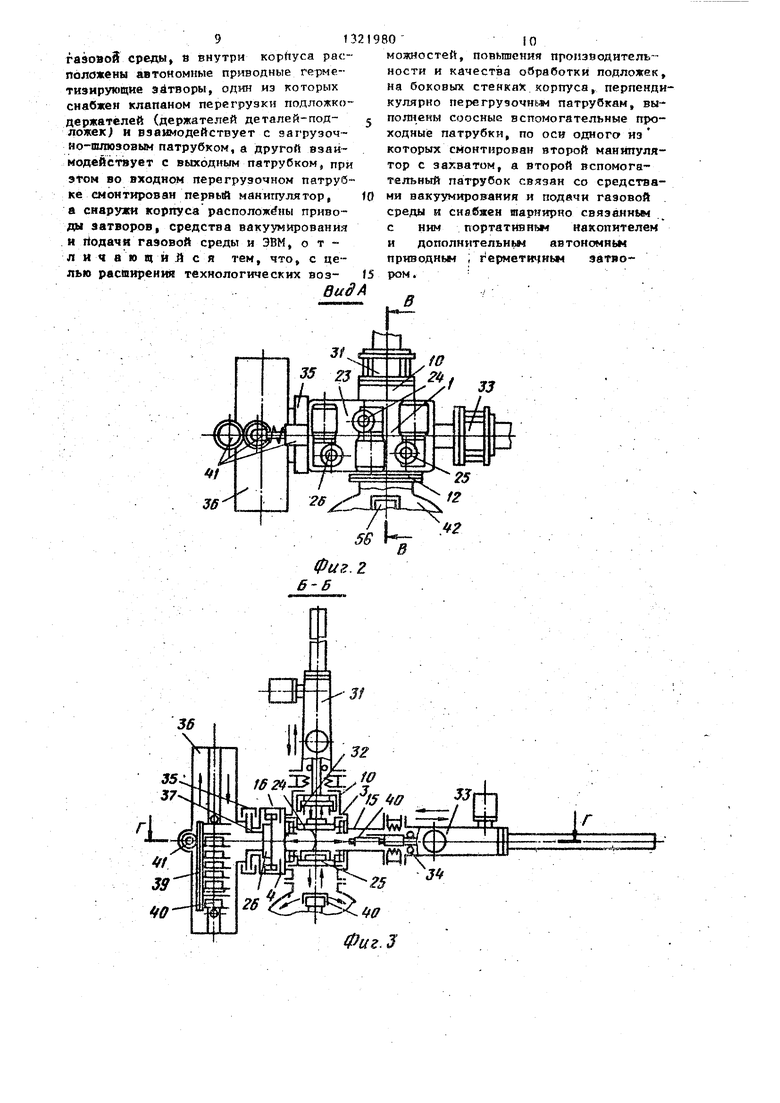
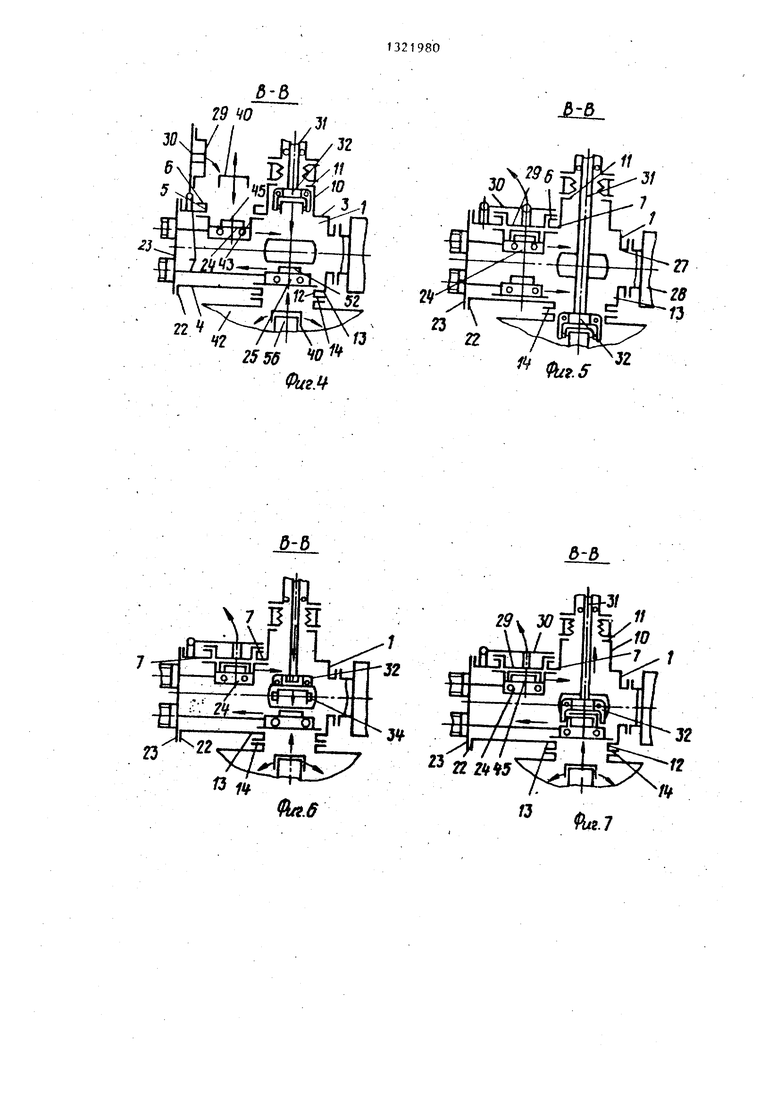
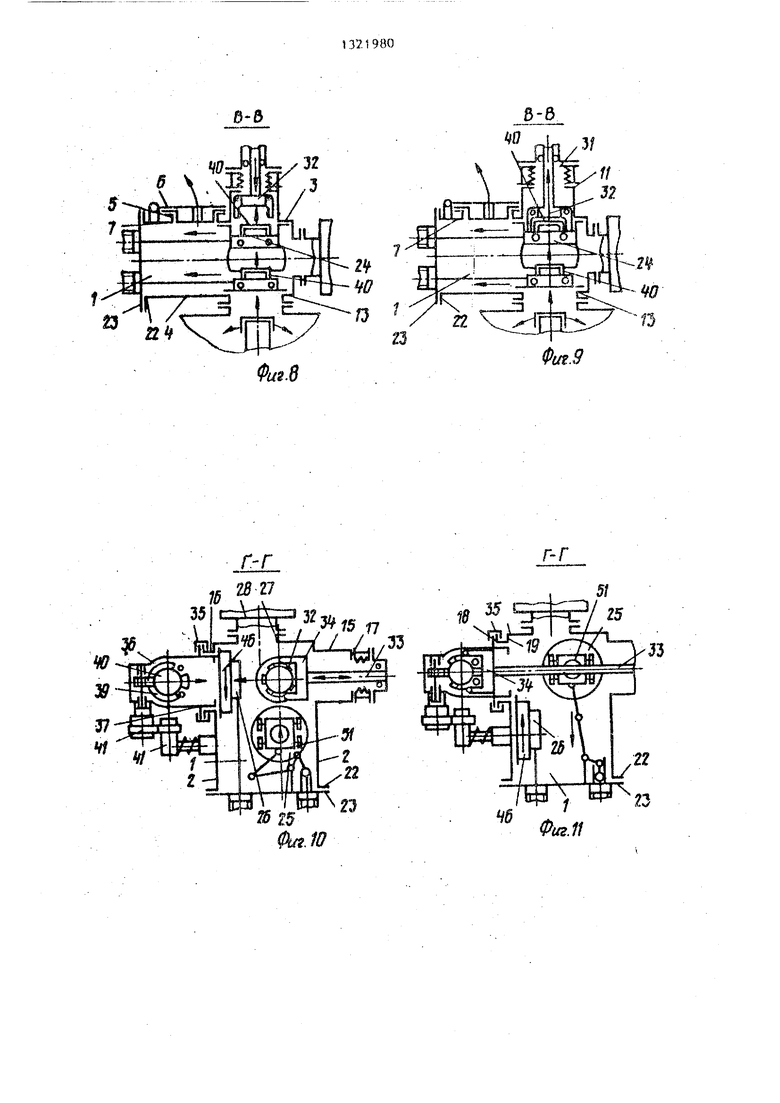
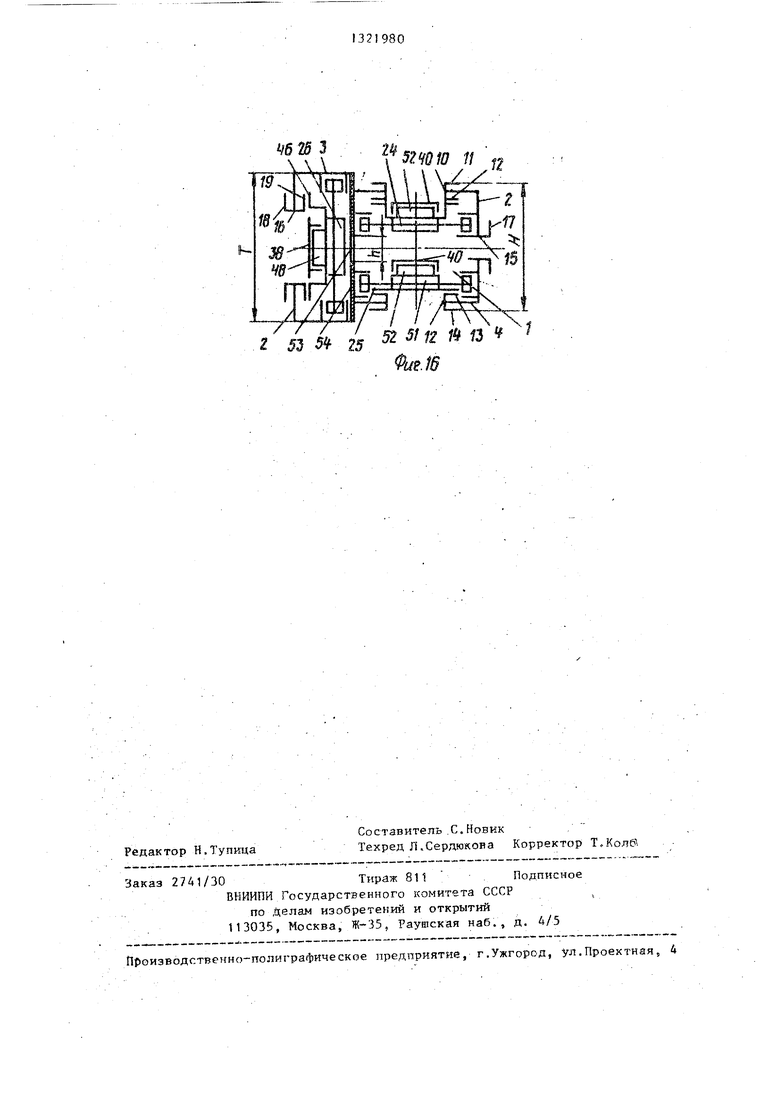
На фиг. 1 изображен переГрузчик, общий ВНД1 на фиг. 2 - вид А на фиг. на фиг. 3 - разрез Б-Б на фиг. 1, механизмы в исходном положении; на фиг. А - разрез В-В на фиг. 2 загрузка подложкодержателя из атмосферы в загрузочный клапан 4 на фиг. 5 - то же, загрузка подложкодержателя в технологическую камеру; «а фиг. 6 - то же, перегрузка подложкодержателя из захвата одного манипулятора в захват другого; на фиг. 7 - TQ же, загрузка подложкодержателя на резервную позицию; на фиг. 8 - то же, перенос подложкодержателя на позицию перегрузки; на фиг. 9 - то же, захват подложкодержателя манипулятором в гнезде клапана загрузоЧно-шлюзового затвора; на фиг. 10 - разрез Г-Г на фиг; 3, перегрузка подложкодержателя в захват манипулятора с продольным расположением; на фиг 11 - то ж е, загрузка подложкодержателя в кассету накопителя; на фиг. 12 - то же, отсоединение и перенос накопителя; на фиг,- 13 - схема взаимодействия двух захватов манипуляторов во время перегрузки; на фиг. 14 - герметизации и вакуумирования патрубка присоединения накопителя и загрузочной горловины накопителяj на фиг.15 схема герметизации и вакуумирования загрузочно-шлюзового патрубка; на фиг. 16 - схема расположения патрубков и затворов в Kopfiyce.
5
0
5
0
5
0
5
0
5
Перргрупчнк содержит коробчатый корпус 1 прямоугольного сечения, образованный двумя боковыми 2 (фиг.10), передней 3 и задней 6 стенками (фиг. А).. -.
На передней стенке 3 выполнены два пар,аллельньк патрубка: нижний входной эагрузочно-шлюзовой 5 с гер- метизиру -мым.и фланцами, наружным 6 и BHyTpe.HHviM 7, и двумя радиальньгми патрубками 8 и 9 соотпетстненно ваку- умиропания и продувки инертными гяза- ми, и основной верхни патрубок 10 с присоединительным фланцем 11 (фиг.АХ
На задн« Й стенке А (фиг. А) вьтол- нен присоединительный перегрузочный патрубок 12, соосный с верхним патрубком 10 передней стенки 3. Он имеет внутренний герметизирующий фланец ,13 и наружный - присоединительный 1 А.
В двух боковых стенках 2 корпуса 1, и плоскости, проходящей через ось основных перегрузочньгх патрубков 10 и 12 перпендикулярно лийии, соединяющей оси нижнего 5 и верхнего 10 патрубков (фиг. А) передней сТенки 3, выполнены соосные между собой вспомогательные проходные. патрубки
15и 16 (фиг. to). Патрубок 15 имеет наружный присоединительный фланец 17, а патрубок 16 имеет два герметизиру- емьрс фланца - наружный 18 и внутренний 19, и два радиальных патрубка 20 и 21 соответственно вакуумирования
и продувки инертными газами (фиг.1А),
На нижнем торце корпуса 1 (фиг.1 и А) выполнен прямоугольньШ фланец 22, расположенный перпендикулярно линии, соединяющей оси нижнего 5 и верхнего 10 патрубков передней стенки 3, и герметично закрытый крышкой 23 корпуса 1, на которой смонтированы электроприводы и приводы механизмов перемещения и запирания трех зат- воров: перегруэочно-шлгозового затвора 2А с запиранием в крайнем заднем положении, герметизирующем загрузоч- но-шлюзовой патрубок 5, затвора 25 с запиранием в край11ем. переднем положении, герметизирующем присоедини- тельный перегрузочный патрубок 12, затвора 26 с запиранием в крайнем переднем положении и герметизацией вспомогательного проходного патрубка
16боковой стенки 2 (фиг., 1А).
На верхнем торце корпуса t выполнен патрубок 27, герметично соединенный со cpe/-icTiuiM 28 вакуумиррвания корпуса 1 (фиг. 1 и to),
К внешним фланцам патрубков кор-- муса I прт соР-Динеиь гермепг-гко: «а наружном флдице 6 патрубка 5 присое- на шаршфных петлях шлюзовой клапан 29 с быстродействуют е( рычажным запором 30 (фи1 . 1 , 4 и 6) , нй фланце 11 патрубка 10 закреплен- передающий манипулятор 31 с поперечным захватом 32; на фланце 17 патрубка
15заггреплон передающий манипулятор 33 с продольн1,гм захватом ЗД (фиг. 10) фланце 18 патрубка
16(фиг. 14) смонтирован байонетно-- роликовьш механязм 35, посредством которого к этому фланцу присо5дииен портатртный накопитслЕ., 36 с эагру:чоч ной горловиной 37, герметично закрытой крышкой ЗЯ, кассетой 39 с расположенными в ней подложкодержателями 40, и механизмом 41 перемещения кас- (фиг. 1 , 3 и 10).
Перегрузчик присоединен к вакуумной камере 42 технологической установ-25 телей 40 механизмы перегрузчика выки фланцем 14 патрубка 12 (фиг. 1-4)
Радиальные патрубки 8 и 20 присоединены посредством пкевмоклапанов -к средствам вакуумирования, а патрубки 9 и 21 - к источнику инертного газа, например, азота (фиг. 14 и 15).
Перегрузочно-ш позоЕой затвор 24 имеет клапан 43 (фиг. 15), в котором выполнено гнездо 44 с держателем 45 подложкодержатслей 40, а затвор 26 имеет клапан. 46 (фиг. М), в котором выполнено гнездо 47 с держателем 48 крышки 38 горловины 37 накопителя 36 и с пружинным амортизатором 49, прижимающим крьппку 38 к герметизируемо- му фланцу 50 загрузочной горловины 37. .
Каретка 51 затвора 25 на стороне, обращенной в направлении манипулятора 31, и1-1еет держатель 52 подложке- держателей 40 (фиг. 3, 4, 10 и 12),
Внутренний объем корпуса 1,;в котором расположен затвор 26 (фиг, 1) с клапаном 46 переноса герметизирующей крышки 38 накопителя 36 (фиг.10), отделен расположенной параллельно фланцам 17-19 вспомогательных патрубков 15 и 16 и имеющей соосное им перегрузочное отверстие 53 продольной стенкой 54, которай соединяют между собой переднюю 3 и заднюю 4 стенки корпуса 1 (фиг, 16),
219804
На подложкодержателях - О закреплены подложки 55 (фиг. 13 и 15), поверхность которых подвергается техно лоп-п еской обработке в вакуумной камере 42, снабженной механизмом 56 транспортированггя подложкодсржателей (фиг. 2 и 4), источниками вакуума и инертного газа и приборами для обработки подложек 55; ЭлектроприБодм
10 затБоров 24-26 манипуляторов 31 и 33, накопителя 36 и шлюзового клапана 29 посредством блока управления имеют электрическую связь с злектрон- но-вычислительной машиной (ЭВМ) 57
f3 (фиг. 1), которая управляет работой этих электроприводов по заданной программе.
Сигналы обратной связи о выполнении механизмами выдают в
20 ЭВМ 57 коммутаторы, которьгми снабжен каждый электропривод (не показаны).
Перегрузчик работает следующим образом.
Операции перегрузки подложкодержа0
5 0
5
полняют в направлениях от входного загрузочно-шлюзового патрубка 5 до верхнего присоединительного патрубка 10 перегрузочно-шлюзовым затвором 24, из верхнего присоединительного пат- :рубка 10 на позиции перегрузки - зах- - ватами, в резервную (с держателем 52) и в технологическую вакуумную 42 камеры - манипулятором 31, из накопителя на позицию перегрузки - манипулятором 33 с продольным захватом 34.
Загружают подложкодержатель 40 из атмосферы в гнездо 44 клапана 43 перегрузочно-шлюзового затвора 24 следующим образом.
0
5
I
Робот автоматически, или оператор
вручную открывают быстродействующий рычажный запор 30 и вместе с ним тлго- зовой клапан 29, При этом патрубок 3 открыт со стороны фланца 6, но гер- метично закрыт затвором 24 посредством клапана 43 со. стороны фланца 7, Действием робота или вручную устанавливают подложкодержатель 40 на держатель 45 в загрузочном гнезде 44, Затем посредством запора 30 прижимают клапан 29 к фланцу 6 и тем герметично закрывают патрубок 5, который в этом cny4fie изолирован от атмосферы и оТ внутреннего объема корпуса Т, Из образовавшегося малого объема между клапанами 29 и 43 в патрубке 5 через радиальный патрубок 8
откачивают воздух до заданной величины давления газов. Так заканчивается операция загруэки и преднарительного обезгаживания-по;(ложки 55 с подложко держателем АО на позиции загрузки.
Операция транспортирования ггодлояг кодержателя 40 на первую позицию перегрузки осуществляется при герметично закрытом шлюэояом клапане 29 и патрубке 12 затвором 25, который изолирует вакуумную камеру 42 от внутреннего объема корпуса 1 (фиг. 4 и 8).
Затем затвор 24 под действием своего привода открывает патрубок 5 со стороны фланца 7 и перемещается в по- ложение, при котором гнездо 44 и держатель 45 клапана 43 занимают пози- цию, соосную с патрубком 10, на присоединительном фланце 11 которого установлен и находится в крайнем заднем положении манипулятор 31 с поперечным захватом 32. Такое положение манипулятора 31 и затвора 24 является, исходным на первой позиции перегрузки (фиг. 8).
Захват под действием приводов манипулятора 31 вводится в гнездо 44 клапана 43, зажимает подложкодержа- тель 40 (фиг. 9) и возвращается.в исходное положение с подложкодержа- телём 40 (фиг, 3), а затвор 24 отводится на позицию загрузки.
В таком состоянии захват 32 в зависимости от технологических требований может быть переведен на одну из трех позиций перегрузки: в положение, соосное с продольньм захватом 34 манипулятора 33 (вторую позицию перегрузки из одного захвата в другой, фиг. 6, 13 и 10)i в положение, при Котором подложкодержатель 40 установлен на держатель 52 затвога 25 (фиг. 7), т.е. в третью, резервную, позицию перегрузки, или в положение, при котором подложкодержатель 40 установлен на держатель механизмя 56 транспортирования подложкоДержателя 40 и вакуумной камере 42 технологической установкиJ т.е. в четвертую технологическую позицию.
Транспортирование подложкодержате- ля 40 на четвертую технологическую позицию и обратно манипулятором 31 осуществляется после разгерметизации
фланца 13 и отвода затвора 25 в край- 55 робот автоматически или оператор вруч .нее заднее положение (фиг. 5). ную следующим образом (фиг. 12 и 3).
Перегрузка подложкодержателя 40 В транспортном положении загрузоч- - в накопитель 36 осуществляется мани- ная горловина 37 накопителя 36 герпулятором 33 с гцюдольным захватом
fO
20
25
15 219806
3. При DTOM один из манипуляторов 31 нли 33 вьшодит захват 32 или 34 g подложкодержателем 40 на вторую позицию перегрузки иа одного захва- 5 та в другой - в положение, при котю- ром они охватывают одновременно и удерживают вместе один и тот же под- |Ложкодержатель.
После этого один из захватов разжимает .подложкодержатель 40 и отходит в исходное положение, а другой продолжает удерживать его и транспортирует прямолинейно возвратно-поступательно в осевом направлении своего манипулятора. Положение захватов на второй позиции перегрузки, из одного захвата в другой, показано на фиг. 10 и 13, положение манипулятора с продольным захватом в момент загрузки или выгрузки подложкодержате- ля 40 в гнездо кассеты 39 накопителя 36 - на фиг. 11, на позиции исходного положения - на фиг. 12.
Захват 34 манипулятора 33 выбирает гнездо кассет1л 39 накопителя 36 следующим образом. Во время нахождения захвата 34 в исходном положении или на позиции перегрузки из одного захвата в другой механизм 41 переме щает кассету 39, вьшодит заданное
гнездо 9 положение, соосное с манипулятором 33 и с горловиной 37.
Таким образом осуществляется пе- 5 регрузка подложкодержателей 40 из ат0
мосферы в вакуумную камеру 42, на резервную позицию и в накопитель 36; из накопителя 36 в вакуумную камеру 42 и на резервную позицию; из вакуумной камеры 42 в атмосферу, на резервную позицию или в накопитель 36; из накопителя в атмосферу и обратно. Марщрут и последовательность перегрузки подложек 55 определен техно- 5 логическим процессом, выполняется по программе ЭВМ и может быть изменен переключением программы, что обеспечивает работу в режиме гибкого автоматизированного производства.
Портативный накопитель 36 присое,п диняют в перегрузчику и отсоединяют от него без разгерметизации (внутренних объемов накопителя 36 и корпуса пер егрузчика. Эту операцию выполняет
0
метично закрыта крьпикой 38, на кото7
с внешней стороны давит атмосфер
рую
иое давление Р.,Виутрм накопителя вакуум.
Шестерня ввода вращения отсоединена от привода механизма 41 перемещения кассеты 39.
Ввод вращения застопорен от вращения автостопором (не показан) и произвольное перемещение кассеты 39 -ВДОЛЬ вакуумного контейнера исключен
Внутренний объем корпуса 1 перегрузчика со с-тороны патрубка 16 гер- MerpriHo закрыт затвором 26 силовьм давлением герметизирующей поверхности клапана фланец 19.
При соединении, накопителя 36с патрубком J6 корпуса 1 (фиг. 14) вводят горловину 37 накопителя 36 в патрубок 16 корпуса 1 До упора.
При этом крышка 38 входит в гнездо 47 кляпана 46 затвора- 26 и взаимодействует с держателем 48, который защелками удерживает крышку ЗЙ от произвольного выпада ния.
Герметизирующий фпанац горловины 37 входит Во взаимодействие с байо- нетно-ролшшвым механизмом 35, вращением которого осуществляется соединение и герметизация .наружного фпан- ца горловины 37 с фланцем 18 патруб- на 16 корпуса 1 и принудительное сжатие амортизатора 49 клапана 46, что исключает разгерметизацию соединения
Внутри корпуса 1 (фиг. 16) стенка 54 создает прочную конструкцию и позволяет просто и технологичнов ня- готовлении сократить строительный размер Н между фланцами 11 и 14, а вместе с ним и ход манипулятора 33, В результате уменьшены габаритные размеры: длина манипулятора 33 и толщина корпуса 1. При этом загрузочное прюстранство и гаирина h загрузочного
клапана 46 с фланцем 19. Таким образом получен малый герметично изоли- 35 отверстия 53 в стенке 54 вьтолнены рованиый объем в патрубке 16 и в гнез- оптимальными, соответствующими толщи- де 47 клапана 46, из которого через радиальный патрубок 20 средства ва- куумирования быстро откачивают воздух до уровня давления газов, равного 40 внутреннему объему з накопителе 36. Сила внешнего газового давления на к-рышку 38 при этом исчезает автоматически.
45
не подложкодержателя 40 с подложкой 55 и захвата 34 манипулятора 33, а размер Т корпуса в части размещения затвора 26 может быть больше размера Н, что o6ecne4FmaeT свободное размещение механизмов затвора 26 герметизации патрубка 16 с внутренней стороны (со стороны фланца 19).
После этого затвор 26 под действием СВОИХ механизмов запирания и перемещения отводит клапан 46 от фланца 19 патрубка 16 и уводит его в сторону вместе с крьшкой 38 накопителя 36.
Во время соединения накопителя 36 с патрубком 16 корпуса 1 шестерня ввода вращения накопителя 36 автоматически соединяется с выходной тестер ней механизма 41 перемещения кассеты 39. Операция присоединения и отсоединения кассеты выполняется быст- DO и автоматически.
Формула изобретения
Вакуумный перегрузчик,содержащий корпус, в котором на двух торцовых
50 поверхностях соосно выполнены входной и выходной перегрузочные патрубки, на одном из торцов, в плоскости расположения их осей выполнен входной загрузочно-шлюзовой патрубок с распо55 ложепными на нем герметизирующим на- : ружнь(м клапаном и двумя радиальными патрубками, связанкынн соответственно с средствами вакуумиров-чния и подачи
8
Отсоединеннр. накопителя выполняется обратной последователытостью работы механизмов. Затвор 26 вьгаодит клапан 46 с крышкой 38 в положение, при котором крышка 38 расположена соосно с горловиной 37. Затвор 26 перемещает клапан 46 в направлении фланца 19 и герметизгфует соединеиия клапана 46 с фланцем 19 и крышки 38 с фланцем 50 горловины 37, сжимая при этом амортизатор 49 (фиг. 14).
Перекрывается патрубок 20 от действия механизмов вакуумнрования, а через патрубок 21 напускается воздух или ийертный газ до получения в патрубке и гнезде 47 клапана 46 давле
Механизм 35 освобождает горловину 37 и накопитель 36 для вьтолмения транспортных операций (фиг. 12). Вяут- ри накопителя 36 сохраняется нужный вакуум.
Так взаимодействуют в работе механизмы перегрузчика.
Внутри корпуса 1 (фиг. 16) стена 54 создает прочную конструкцию и позволяет просто и технологичнов ня- готовлении сократить строительный размер Н между фланцами 11 и 14, а вместе с ним и ход манипулятора 33, В результате уменьшены габаритные размеры: длина манипулятора 33 и толина корпуса 1. При этом загрузочное прюстранство и гаирина h загрузочного
тверстия 53 в стенке 54 вьтолнены оптимальными, соответствующими толщи-
отверстия 53 в стенке 54 вьтолнены оптимальными, соответствующими толщи-
не подложкодержателя 40 с подложкой 55 и захвата 34 манипулятора 33, а размер Т корпуса в части размещения затвора 26 может быть больше размера Н, что o6ecne4FmaeT свободное размещение механизмов затвора 26 герметизации патрубка 16 с внутренней стороны (со стороны фланца 19).
Формула изобретения
Вакуумный перегрузчик,содержащий корпус, в котором на двух торцовых
50 поверхностях соосно выполнены входной и выходной перегрузочные патрубки, на одном из торцов, в плоскости расположения их осей выполнен входной загрузочно-шлюзовой патрубок с распо55 ложепными на нем герметизирующим на- : ружнь(м клапаном и двумя радиальными патрубками, связанкынн соответственно с средствами вакуумиров-чния и подачи
газовой среды а внутри корпуса расположены автономные приводные герметизирующие зйтворы, один из которых сиабжеи клапаном перегрузки подложко- держатёлей (держателей деталей-под- ложек; и взаимодействует с загрузоч- но-шлюзовым патрубком, а другой взаимодействует с выходным патрубком, при этом во входном перегрузочном патрубке смонтирован первый манипулятор, а снаружи корпуса расположёны приводы затворов, средства вакуумирования и Нодачя газовой среды и ЭВМ, о т л и ч а ю щ и Л с я тем, что, с целью расширения технологических воз-
ви
можиостей, повышения производительности и качества обработки подложек, на боковых стенках корпуса, перпендикулярно перегрузочнб патрубкам, выполнены соосные вспомогательные проходные патрубки, по оси одного из которых смонтирован второй манипулятор с захватом, а второй вспомогательный патрубок связан со средствами вакуумирования и подачи газовой среды и снабжен шарнирно свяэанньм с ним портативньм накопителем и дополиительиш автоиомиьм приводньм ; герметичиьм затвором .
Г
б-д
29 40
зг
Ч
42 /7 f3 2556 0
ФигЧ
/V
Й.5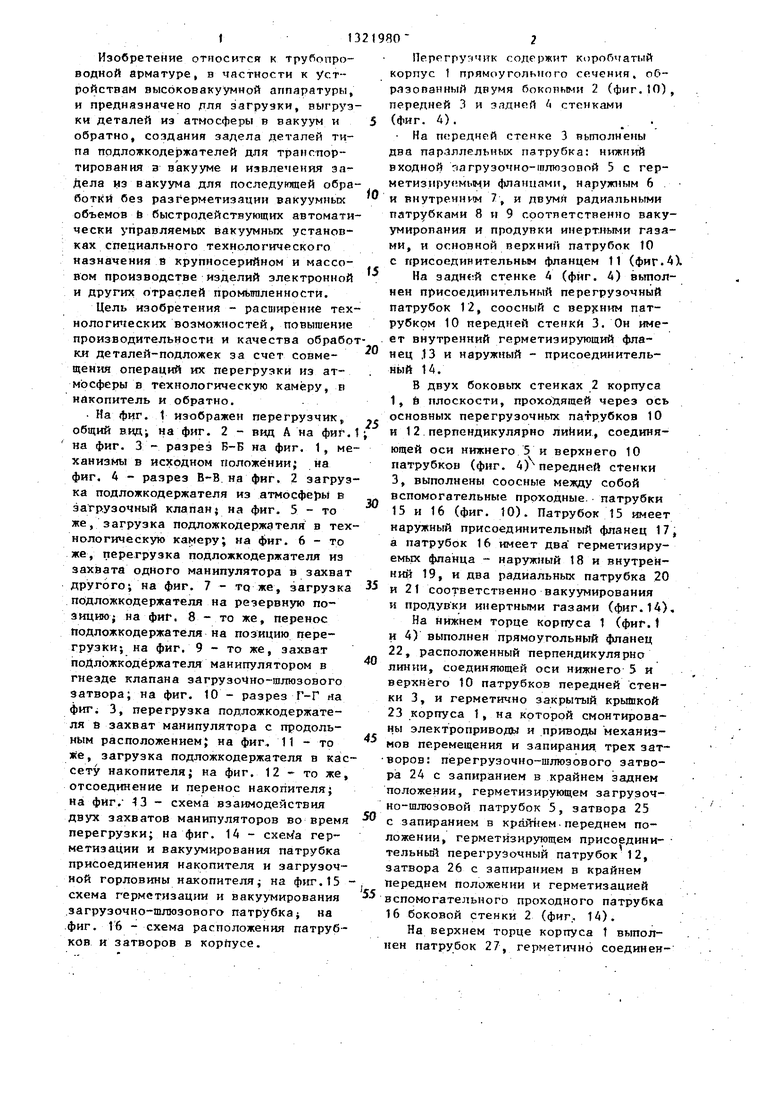
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство шиберного типа | 1985 |
|
SU1275176A1 |
| УСТРОЙСТВО ОСАЖДЕНИЯ СЛОЕВ ИЗ ГАЗОВОЙ ФАЗЫ | 1991 |
|
RU2014670C1 |
| Загрузочное устройство шиберного типа | 1982 |
|
SU1060851A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ИЗДЕЛИЙ В ВАКУУМЕ | 1985 |
|
SU1340230A1 |
| Установка для молекулярно-лучевой эпитаксии | 1984 |
|
SU1231920A1 |
| Вакуумный манипулятор | 1985 |
|
SU1315293A1 |
| Вакуумный комплекс термического отжига полупроводниковых пластин | 2021 |
|
RU2764877C1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| УСТАНОВКА ДЛЯ НАПЫЛЕНИЯ В ВАКУУМЕ ТОПОЛОГИЧЕСКОГО ТОНКОПЛЁНОЧНОГО РИСУНКА ГИБРИДНОЙ МИКРОСХЕМЫ НА ПОДЛОЖКУ | 2014 |
|
RU2590747C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ | 1992 |
|
RU2034362C1 |

Изобретение относится к -электронной и др. отраслям техники., Р частности к устройствам высоковакуумной аппаратуры. Цель изобретения - расширение технологических возможностей и поаьпиение производительности . II качества обработки деталей-подложек. Через эагрузочно-шлюзовой патрубок 5 детали типа подложек на под- ложкодержателях поступают в патрубок 10. Из него манипулятором 31 -передаются на резервную поз1щию или в технологическую вакуумную камеру, а из накопителя 36 манипулятором 33 под- ложкодержатели поступают ка позицию перегрузки. Перемещения подложкодер- жателей в зависимости от техпроцесса ногут осуществляться в различных направлениях манипуляторами 31 и 33 с использованием резервной позиции внутри корпуса 1, что обеспечивает совмещение технологических операций внутри корпуса. Один из вспомогательных проходных патрубков корпуса -1. связан со средствами вакуумирования и подачи газовой среды, в которой производится технологическая операция. Патрубок посредством герметичного затвора связан с портативным накопителем 36, в который подложки поступают- из камеры, или наоборот в зависимости от техпроцесса, 16 ия. (Л оо to т,Л. QO 00 Фиг f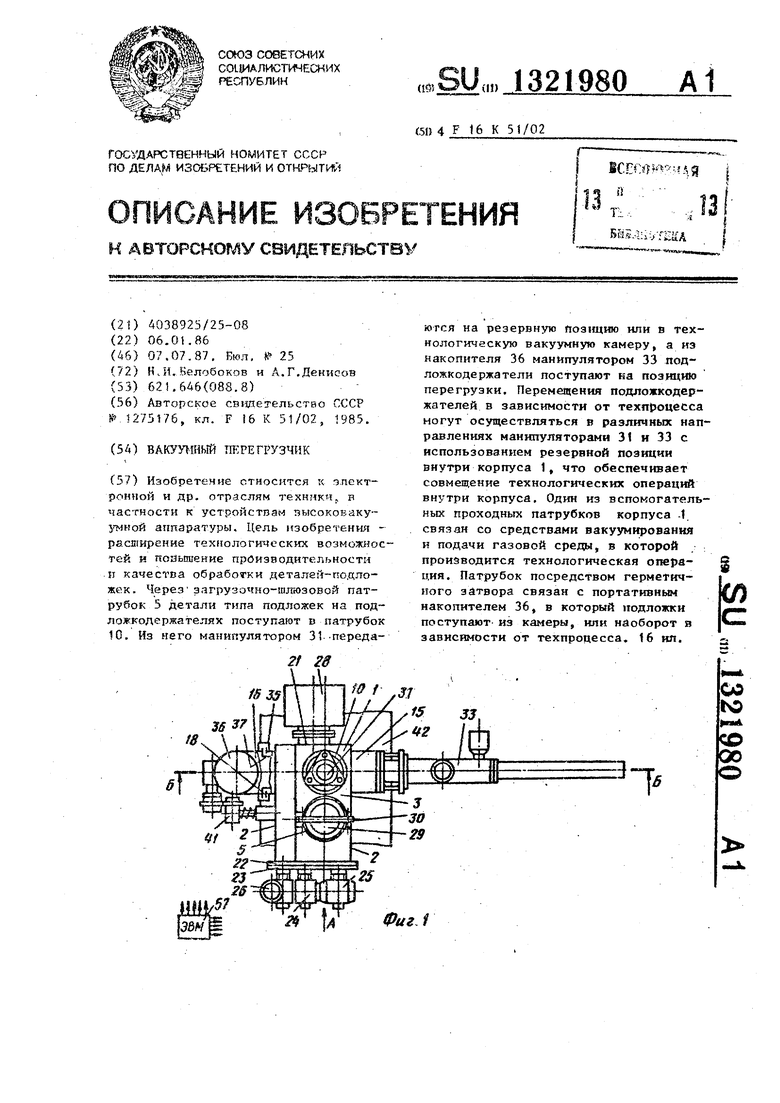
5-а
5-5
.
« /7
г.7
t3
Фм.в
8-6
IdL.
2817
ir7,f7
37
W
15 Фиу.Ю
2э
Г-Г
18
35
.
n
22
N
23
Фиг. 12
J/
0jy
Й/г /3
27 J5 Д
/15 -а
/5
/I
N
SUlL.
STP
л
о-Я иrt
яр / JL -т Т f и- Si-I
«
7 «У г«
./5
24«
// f
2 53 5 25 3
/e./
Редактор H.Тупица
Заказ 27ft /30Тираж 811 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Производствеяно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Составитель.С.Новик
Техред Л.Сердюкона Корректор Т.Колв
| Загрузочное устройство шиберного типа | 1985 |
|
SU1275176A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| (ЗА) ВАКУУМНЫЙ TIE РЕ ГРУЗЧИК | |||
