фиг. 1
недействующий с колесом 5. Шток подпружинен относительно рамы 2, а коней оси ведущей шестерни имеет квадратное поперечное сечение и канавку, воздействующую со стержнем двухпози- ционного фиксатора. При работе лебедки груз опускают после того, как перемещают втулку 9, которая воздействует через шайбу 10 на шток, выведя закрепленный на нем кулачок из зацепления с собачкой 6. При этом рукоятка фиксируется относительно оси ведущей шестерни, что позволяет беспрепятственно опускать груз. 4 ил.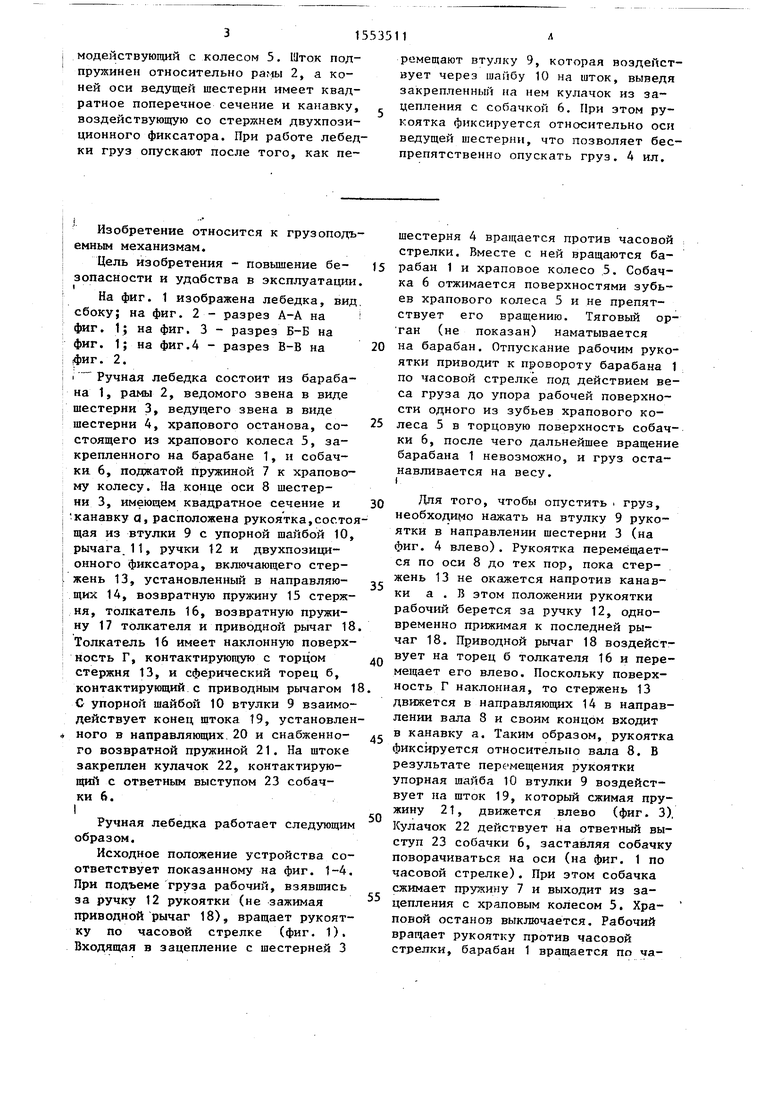
| название | год | авторы | номер документа |
|---|---|---|---|
| Лебедка | 1985 |
|
SU1321668A1 |
| РУЧНАЯ ЛЕБЕДКА | 1993 |
|
RU2045469C1 |
| Ручная лебедка | 1980 |
|
SU919979A1 |
| Ручная волновая лебедка | 1981 |
|
SU1087456A1 |
| Ручная лебедка | 1983 |
|
SU1320163A1 |
| Устройство для накатки кольцевых канавок на трубчатых заготовках | 1983 |
|
SU1133000A1 |
| Лебедка | 1988 |
|
SU1627501A1 |
| Ручная лебедка | 1990 |
|
SU1744053A1 |
| Рукоятка лебедки | 1988 |
|
SU1717528A1 |
| Ручная лебедка | 1979 |
|
SU887446A2 |
Изобретение относится к грузоподъемным механизмам. Цель изобретения - повышение безопасности и удобства в эксплуатации. Ручная лебедка содержит барабан 1, раму 2, шестерню 3, связанную с ней ведущую шестерню, храповое колесо 5, собачку 6, рукоятку, включающую в себя втулку 9 с шайбой 10, рычаг 11 и ручку 12. На штоке, параллельном оси ведущей шестерни, установлен кулачок, взаимодействующий с колесом 5. Шток подпружинен относительно рамы 2, а конец оси ведущей шестерни имеет квадратное поперечное сечение и канавку, воздействующую со стержнем двухпозиционного фиксатора. При работе лебедки груз опускают после того, как перемещают втулку 9, которая воздействует через шайбу 10 на шток, выведя закрепленный на нем кулачок из зацепления с собачкой 6. При этом рукоятка фиксируется относительно оси ведущей шестерни, что позволяет беспрепятственно опускать груз. 4 ил.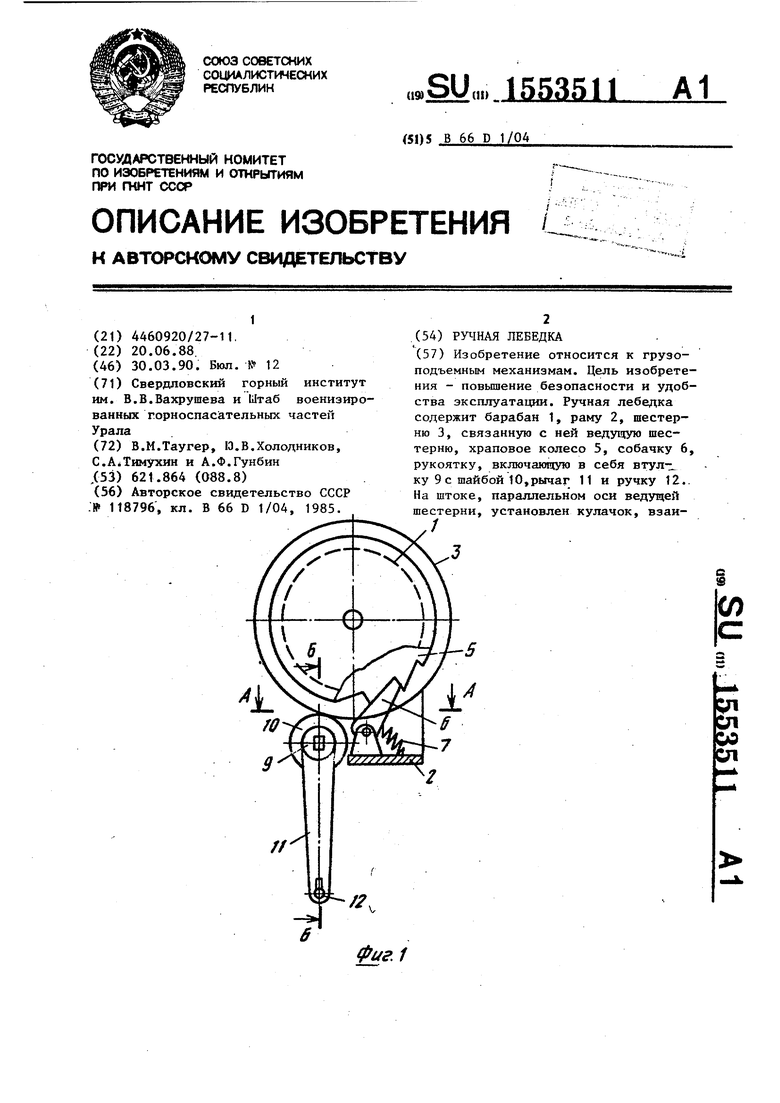
Изобретение относится к грузоподъемным механизмам.
Цель изобретения - повышение бе- 15 зопасности и удобства в эксплуатации.
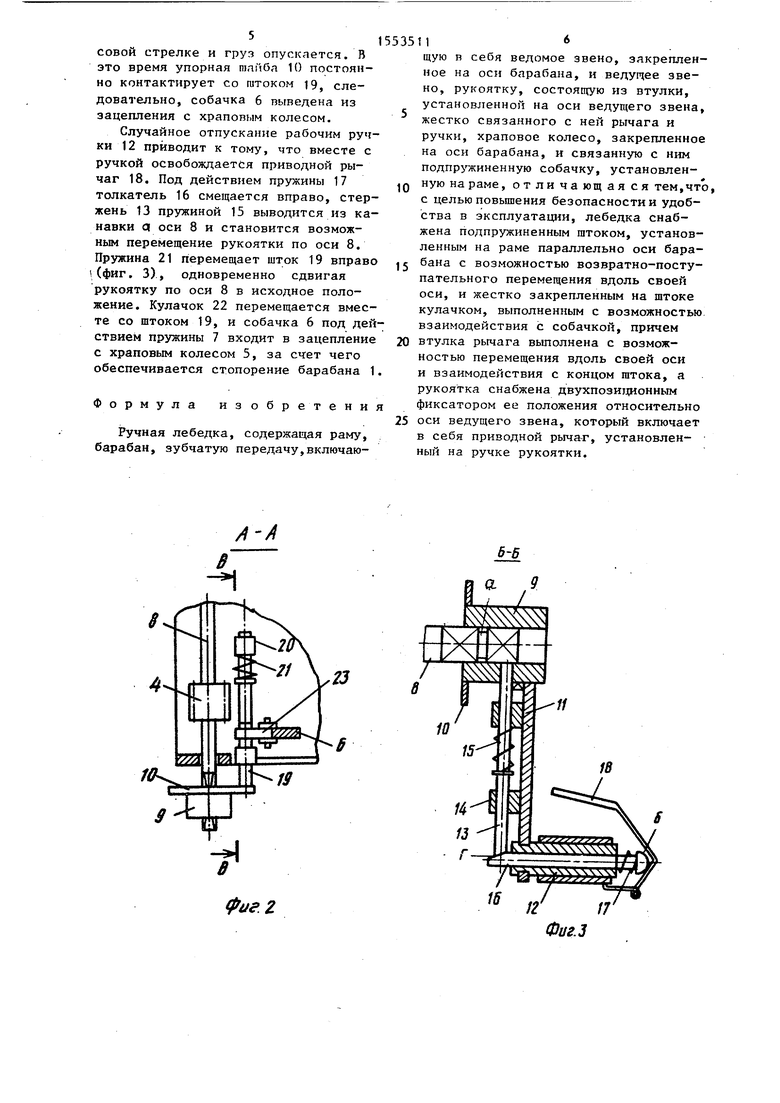
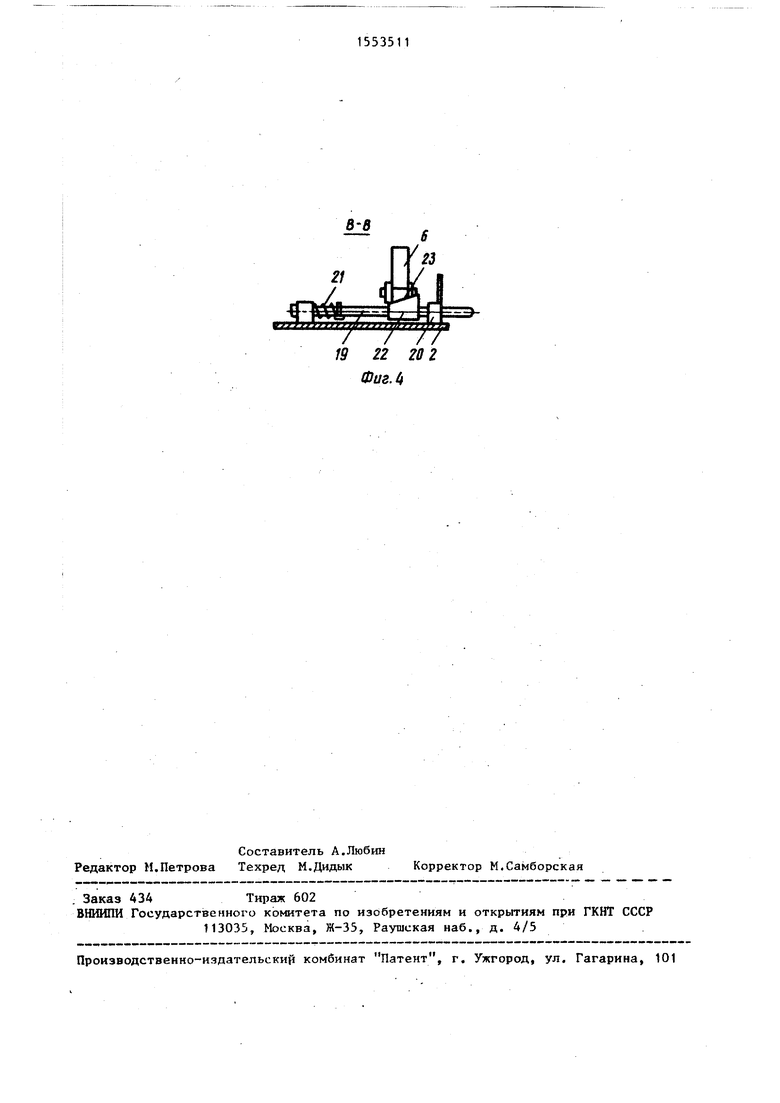
На фиг. 1 изображена лебедка, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг.4 - разрез В-В на 20 фиг. 2.
i Ручная лебедка состоит из барабана 1, рамы 2, ведомого звена в виде шестерни 3, ведущего звена в виде шестерни 4, храпового останова, со- 25 стоящего из храпового колеса 5, закрепленного на барабане 1, и собачки 6, поджатой пружиной 7 к храповому колесу. На конце оси 8 шестерни 3, имеющем квадратное сечение и 30 канавку а, расположена рукоятка,состоящая из втулки 9 с упорной шайбой 10, рычага.11, ручки 12 и двухпозици- онного фиксатора, включающего стер- жень 13, установленный в направляю- 35 щих 14, возвратную пружину 15 стержня, толкатель 16, возвратную пружину 17 толкателя и приводной рычаг 18. Толкатель 16 имеет наклонную поверхность Г, контактирующую с торцом 40 стержня 13, и сферический торец б, контактирующий с приводным рычагом 18. С упорной шайбой 10 втулки 9 взаимодействует конец штока 19, установлен- ного в направляющих 20 и снабжение- 45 го возвратной пружиной 21. На штоке закреплен кулачок 22, контактирующий с ответным выступом 23 собачки 6.
I
Ручная лебедка работает следующим образом.
Исходное положение устройства соответствует показанному на фиг. 1-4. При подъеме груза рабочий, взявшись за ручку 12 рукоятки (не зажимая приводной рычаг 18), вращает рукоятку по часовой стрелке (фиг. 1). Входящая в зацепление с шестерней 3
5 0 5
0
шестерня 4 вращается против часовой стрелки. Вместе с ней вращаются барабан 1 и храповое колесо 5. Собачка 6 отжимается поверхностями зубьев храпового колеса 5 и не препятствует его вращению. Тяговый орган (не показан) наматывается на барабан. Отпускание рабочим рукоятки приводит к провороту барабана 1 по часовой стрелке под действием веса груза до упора рабочей поверхности одного из зубьев храпового колеса 5 в торцовую поверхность собачки 6, после чего дальнейшее вращение барабана 1 невозможно, и груз останавливается на весу, i
Для того, чтобы опустить i груз, необходимо нажать на втулку 9 рукоятки в направлении шестерни 3 (на фиг. 4 влево). Рукоятка перемещается по оси 8 до тех пор, пока стержень 13 не окажется напротив канавки а . В этом положении рукоятки рабочий берется за ручку 12, одновременно прижимая к последней рычаг 18. Приводной рычаг 18 воздействует на торец б толкателя 16 и перемещает его влево. Поскольку поверхность Г наклонная, то стержень 13 движется в направляющих 14 в направлении вала 8 и своим концом входит в канавку а. Таким образом, рукоятка фиксируется относительно вала 8. В результате перемещения рукоятки упорная шайба 10 втулки 9 воздействует на шток 19, который сжимая пружину 21, движется влево (фиг. 3), Кулачок 22 действует на ответный выступ 23 собачки 6, заставляя собачку поворачиваться на оси (на фиг. 1 по часовой стрелке). При этом собачка сжимает пружину 7 и выходит из зацепления с храповым колесом 5. Храповой останов выключается. Рабочий вращает рукоятку против часовой стрелки, барабан 1 вращается по ча51
совой стрелке и груз опускается. В это время упорная гапйба 10 постоянно контактирует со гатоком 19, следовательно, собачка 6 выведена из зацепления с храповым колесом.
Случайное отпускание рабочим ручки 12 приводит к тому, что вместе с ручкой освобождается приводной рычаг 18. Под действием пружины 17 толкатель 16 смещается вправо, стержень 13 пружиной 15 выводится из канавки q оси 8 и становится возможным перемещение рукоятки по оси 8. Пружина 21 перемещает шток 19 вправо ((фиг. 3), одновременно сдвигая рукоятку по оси 8 в исходное положение. Кулачок 22 перемещается вместе со штоком 19, и собачка 6 под действием пружины 7 входит в зацепление с храповым колесом 5, за счет чего обеспечивается стопорение барабана 1
Формула изобретения
Ручная лебедка, содержащая раму, барабан, зубчатую передачу,включаюл-л
/
фиг. 2
0
5
16
щую в себя ведомое звено, закрепленное на оси барабана, и ведущее звено, рукоятку, состоящую из втулки, установленной на оси ведущего звена, жестко связанного с ней рычага и ручки, храповое колесо, закрепленное на оси барабана, и связанную с ним подпружиненную собачку, установлен- ную на раме, отличающаяся тем, что, с целью повышения безопасности и удобства в эксплуатации, лебедка снабжена подпружиненным гатоком, установленным на раме параллельно оси барабана с возможностью возвратно-поступательного перемещения вдоль своей оси, и жестко закрепленным на штоке кулачком, выполненным с возможностью взаимодействия с собачкой, причем втулка рычага выполнена с возможностью перемещения вдоль своей оси и взаимодействия с концом гатока, а рукоятка снабжена двухпозиционным фиксатором ее положения относительно оси ведущего звена, который включает в себя приводной рьгча-г, установленный на ручке рукоятки.
6-5
S
лаиллллиьШЯ
19 22 20 2 Фиг. It
| Реверсивный кантователь полос рычажного типа | 1958 |
|
SU118796A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
