/
сд сд сд
1C
О
ю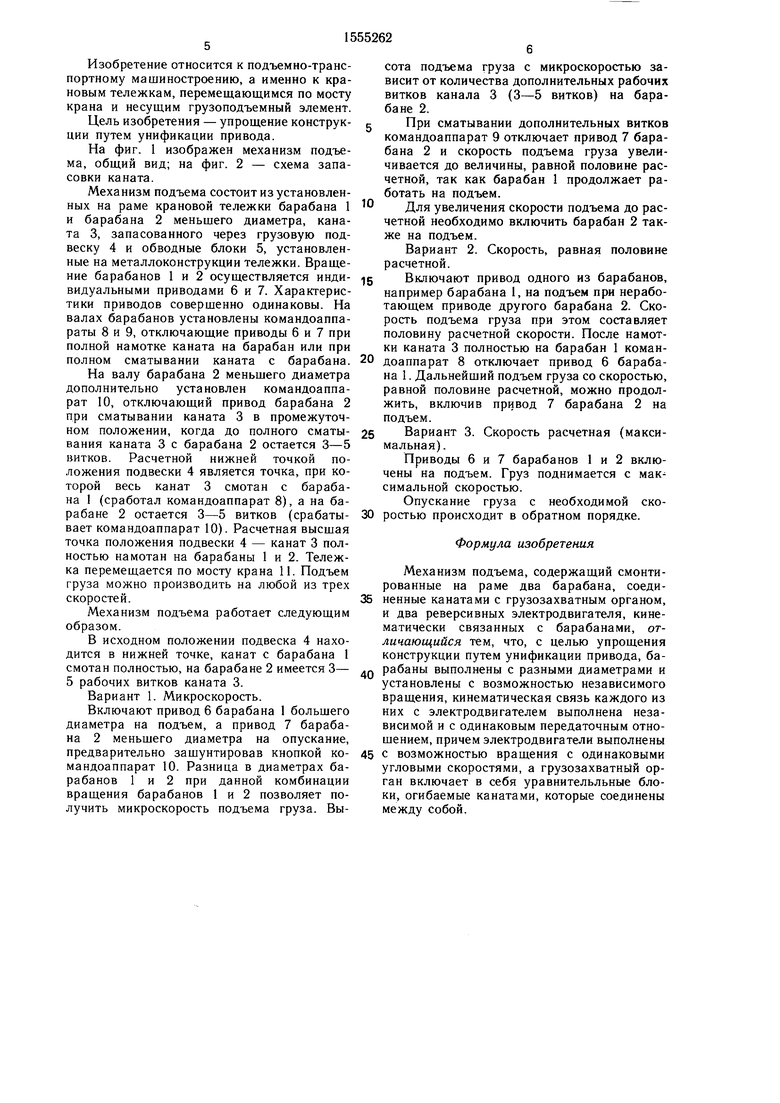
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕДВИЖЕНИЯ ГРУЗА | 2001 |
|
RU2194005C2 |
| СПОСОБ ЗАМЕНЫ КАНАТА В ПОДЪЕМНОМ УСТРОЙСТВЕ | 2002 |
|
RU2258662C2 |
| Грузоподъемное устройство | 1979 |
|
SU872443A1 |
| ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА С КАНАТНОЙ ТЯГОЙ | 2005 |
|
RU2288163C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Грузоподъемное устройство | 1989 |
|
SU1724562A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗА | 2001 |
|
RU2189938C1 |
| ПОДЪЕМНИК УСТАНОВКИ СУХОГО ТУШЕНИЯ КОКСА | 1991 |
|
RU2041912C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2000 |
|
RU2193517C2 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к крановым тележкам, перемещающимся по мосту крана и несущим грузоподъемный элемент. Цель изобретения - упрощение конструкции путем унификации привода. Механизм подъема выполнен в виде двух отдельных барабанов 1 и 2, соединенных грузовым канатом 3, проходящим через обводные блоки 5 и блоки грузовой подвески 4. Причем барабаны 1, 2 снабжены индивидуальными приводами с одинаковыми характеристиками, а барабан 2 выполнен с меньшим диаметром. 2 ил.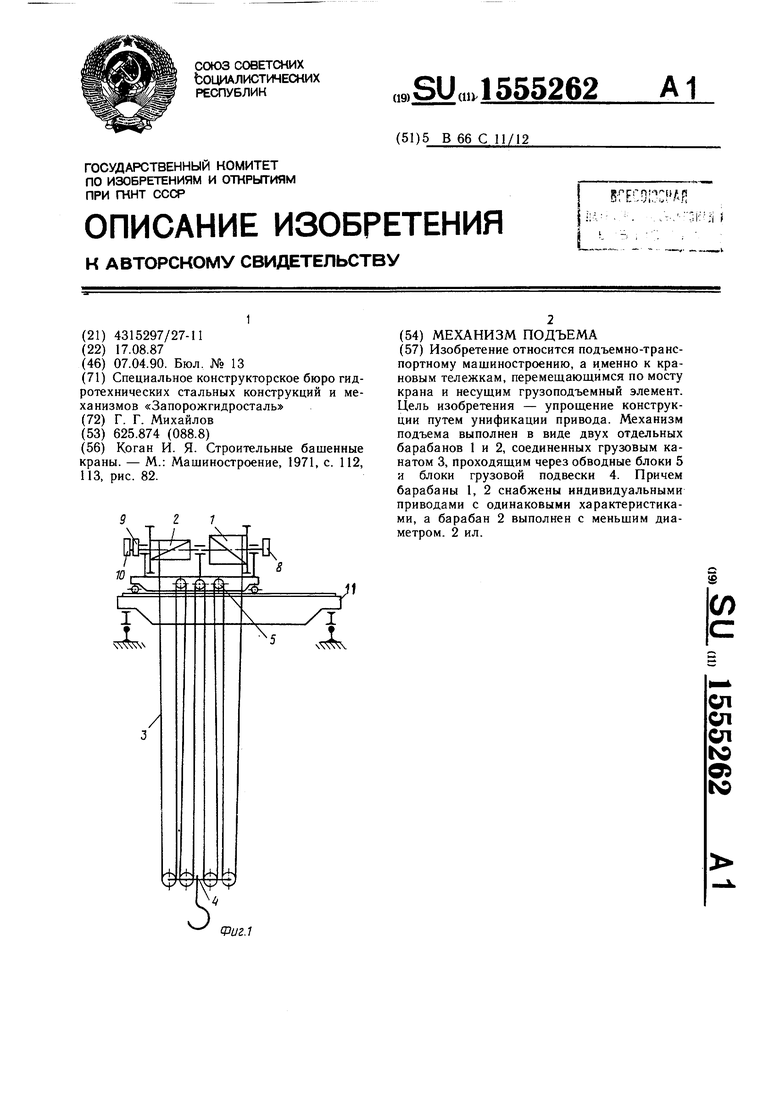
-Ь
Ч
3
-к
V1 4
А
Фиг1
Изобретение относится к подъемно-транспортному машиностроению, а именно к крановым тележкам, перемещающимся по мосту крана и несущим грузоподъемный элемент.
Цель изобретения - упрощение конструкции путем унификации привода.
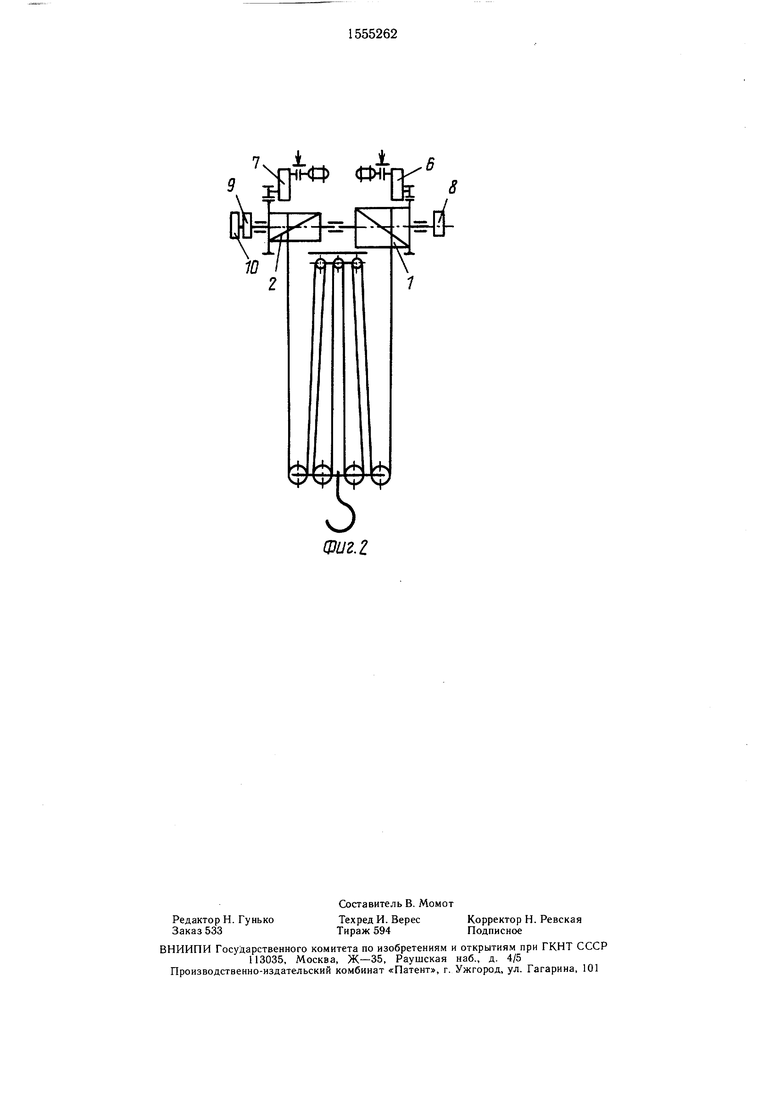
На фиг. 1 изображен механизм подъема, общий вид; на фиг. 2 - схема запа- совки каната.
Механизм подъема состоит из установленных на раме крановой тележки барабана 1 и барабана 2 меньшего диаметра, каната 3, запасованного через грузовую подвеску 4 и обводные блоки 5, установленные на металлоконструкции тележки. Вращение барабанов 1 и 2 осуществляется инди- g видуальными приводами 6 и 7. Характеристики приводов совершенно одинаковы. На валах барабанов установлены командоаппа- раты 8 и 9, отключающие приводы 6 и 7 при полной намотке каната на барабан или при
10
сота подъема груза с микроскоростью зависит от количества дополнительных рабочих витков канала 3 (3-5 витков) на барабане 2.
При сматывании дополнительных витков командоаппарат 9 отключает привод 7 барабана 2 и скорость подъема груза увеличивается до величины, равной половине расчетной, так как барабан 1 продолжает работать на подъем.
Для увеличения скорости подъема до расчетной необходимо включить барабан 2 также на подъем.
Вариант 2. Скорость, равная половине расчетной.
Включают привод одного из барабанов, например барабана 1, на подъем при неработающем приводе другого барабана 2. Скорость подъема груза при этом составляет половину расчетной скорости. После намотки каната 3 полностью на барабан 1 команполном сматывании каната с барабана. 20 доаппарат 8 отключает привод 6 бараба- На валу барабана 2 меньшего диаметра на 1. Дальнейший подъем груза со скоростью, дополнительно установлен командоаппарат 10, отключающий привод барабана 2
при ном
сматывании каната 3 в промежуточ- положении, когда до полного сматывания каната 3 с барабана 2 остается 3-5 витков. Расчетной нижней точкой положения подвески 4 является точка, при которой весь канат 3 смотан с барабана 1 (сработал командоаппарат 8), а на барабане 2 остается 3-5 витков (срабатывает командоаппарат 10). Расчетная высшая точка положения подвески 4 - канат 3 полностью намотан на барабаны 1 и 2. Тележка перемещается по мосту крана 11. Подъем груза можно производить на любой из трех скоростей.
Механизм подъема работает следующим образом.
В исходном положении подвеска 4 находится в нижней точке, канат с барабана 1
25
равной половине расчетной, можно продолжить, включив привод 7 барабана 2 на подъем.
Вариант 3. Скорость расчетная (максимальная).
Приводы б и 7 барабанов 1 и 2 включены на подъем. Груз поднимается с максимальной скоростью.
Опускание груза с необходимой ско- 30 ростью происходит в обратном порядке.
Формула изобретения
Механизм подъема, содержащий смонтированные на раме два барабана, соеди- 35 ненные канатами с грузозахватным органом, и два реверсивных электродвигателя, кинематически связанных с барабанами, отличающийся тем, что, с целью упрощения конструкции путем унификации привода, басмотан полностью, на барабане 2 имеется 3- ,Q рабаны выполнены с разными диаметрами и 5 рабочих витков каната 3.
Вариант 1. Микроскорость.
Включают привод 6 барабана 1 большего диаметра на подъем, а привод 7 барабана 2 меньшего диаметра на опускание, предварительно зашунтировав кнопкой командоаппарат 10. Разница в диаметрах барабанов 1 и 2 при данной комбинации вращения барабанов 1 и 2 позволяет получить микроскорость подъема груза. Выустановлены с возможностью независимого вращения, кинематическая связь каждого из них с электродвигателем выполнена независимой и с одинаковым передаточным отношением, причем электродвигатели выполнены 45 с возможностью вращения с одинаковыми угловыми скоростями, а грузозахватный орган включает в себя уравнительльные блоки, огибаемые канатами, которые соединены между собой.
сота подъема груза с микроскоростью зависит от количества дополнительных рабочих витков канала 3 (3-5 витков) на барабане 2.
При сматывании дополнительных витков командоаппарат 9 отключает привод 7 барабана 2 и скорость подъема груза увеличивается до величины, равной половине расчетной, так как барабан 1 продолжает работать на подъем.
Для увеличения скорости подъема до расчетной необходимо включить барабан 2 также на подъем.
Вариант 2. Скорость, равная половине расчетной.
Включают привод одного из барабанов, например барабана 1, на подъем при неработающем приводе другого барабана 2. Скорость подъема груза при этом составляет половину расчетной скорости. После намотки каната 3 полностью на барабан 1 командоаппарат 8 отключает привод 6 бараба- на 1. Дальнейший подъем груза со скоростью,
доаппарат 8 отключает привод 6 бараба- на 1. Дальнейший подъем груза со скоростью,
равной половине расчетной, можно продолжить, включив привод 7 барабана 2 на подъем.
Вариант 3. Скорость расчетная (максимальная).
Приводы б и 7 барабанов 1 и 2 включены на подъем. Груз поднимается с максимальной скоростью.
Опускание груза с необходимой ско- ростью происходит в обратном порядке.
Формула изобретения
Механизм подъема, содержащий смонтированные на раме два барабана, соеди- ненные канатами с грузозахватным органом, и два реверсивных электродвигателя, кинематически связанных с барабанами, отличающийся тем, что, с целью упрощения конструкции путем унификации привода, барабаны выполнены с разными диаметрами и
рабаны выполнены с разными диаметрами и
установлены с возможностью независимого вращения, кинематическая связь каждого из них с электродвигателем выполнена независимой и с одинаковым передаточным отношением, причем электродвигатели выполнены с возможностью вращения с одинаковыми угловыми скоростями, а грузозахватный орган включает в себя уравнительльные блоки, огибаемые канатами, которые соединены между собой.
Фиг.1
| Коган И | |||
| Я | |||
| Строительные башенные краны | |||
| - М.: Машиностроение, 1971, с | |||
| Прялка для изготовления крученой нити | 1920 |
|
SU112A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
