01 СП
сл
00
эо
Изобретение относится к радиотехнике и может быть использовано для стабилизации динамического диапазона и урЬвня смещения входного непрерыв- ного сигнала в системах радиолокации телевидения и автоматики.
Цель изобретения - повышение точности стабилизации.
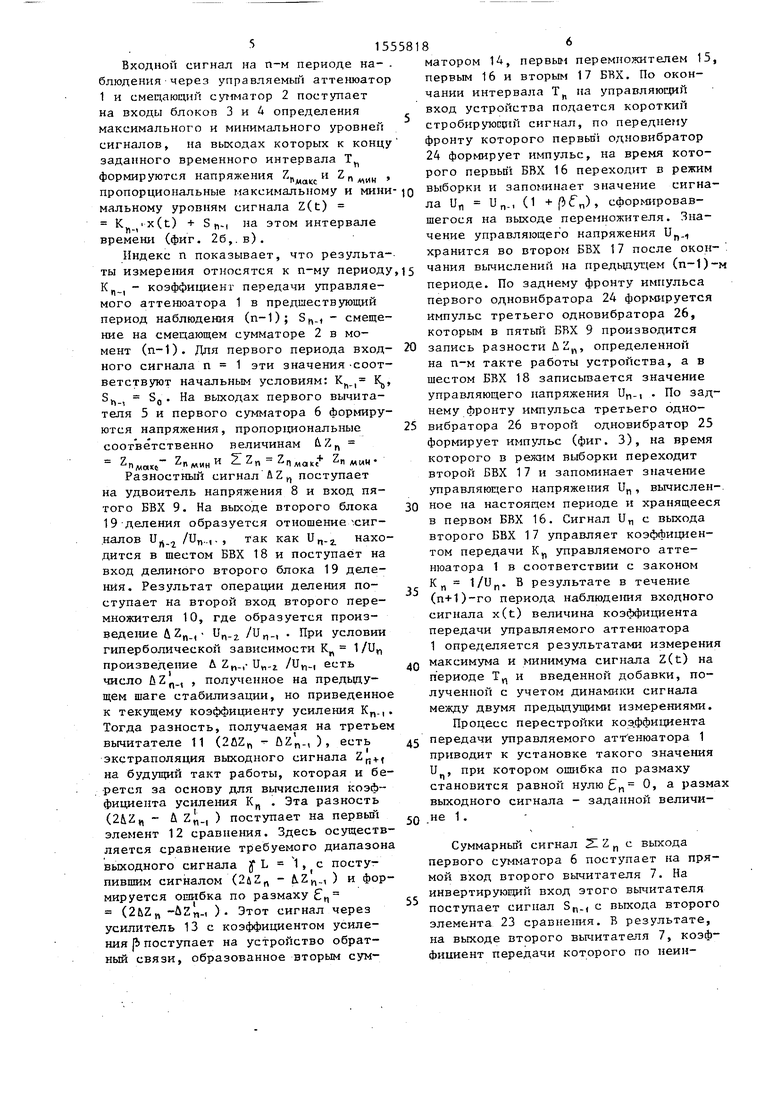
На фиг. 1 приведена структурная электрическая схема устройства; на фиг. 2 и 3 - эпюры напряжений, поясняющие работу устройства.
Устройство стабилизации переменно и постоянной составляющих сигнала содержит управляемый аттенюатор 1, смещающий сумматор 2, блок 3 определения максимального уровня сигнала, блок 4 определения минимального уровня сигнала, первый вычитатель 5, пер вый сумматор 6, второй вычитатель 7, удвоитель 8 напряжения, пятый блок 9 выборки и хранения (БВХ), второй перемножитель 10, третий вычитатель 11 первый элемент 12 сравнения, усили- тель 13, второй сумматор 14, первый перемножитель 15, первый 16, второй t7 и шестой 18 БВХ, второй 19 и первый 20 блоки деления, третий 21 и четвертый 22 ВВХ, второй элемент 23 сравнения, первый 24, второй 25 и третий 26 одновибраторы.
Работа устройства описывается следующими соотношениями:
Г вizn-. и«-2.
и Ц1 .);
(О
S М и макс + zn « 2Sw.t
де
махе1
U - управляющее напряжение
управляемого аттенюатора на n-м такте работы;
К - коэффициент передачи управляемого аттенюатора; пмич максимальное и минимальное значения выходного сигнала на n-м такте;
SM - смещение сигнала, вырабатываемое устройством на n-м такте;
L -- требуемый динамический
диапазон выходного сигнала;
у - коэффициент запаса;
М - требуемый уровень смеще-
ния;
В - коэффициент, определяющий помехоустойчивость устройства.
Устройство работает следующим образом.
На вход устройства поступает сигнал x(t) (фиг. 2а). Сигнал характеризуется двумя параметрами: размахом
цХп - X(,waKC- хп мии
и смещением
1 ,
2 Хпмакс + хпмин
),
г«е и.хп««н соответственно максимальное и минимальное значения выходного сигнала x(t) на некоторомN заранее заданном интервале времени Тп (на n-м периоде наблюдения входного сигнала) . Таким интервалом Tj, в зависимости от решаемой задачи могут быть: длительность телевизионного кадра, длительность строчной развертки, период кругового обзора радиолокационной станции и т.д.
Для пояснения работы зададимся величинами стабилизации:
JL 1; М L/2 1/2.
В этом случае устройство решает задачу поддержания динамического диапазона входного сигнала в пределах от О до 1.
Перед началом работы устройства J3 БВХ 9, 22, 18 и 17 записываются начальные условия: в БВХ 17$ 18 - минимальный уровень управляющего напряжения имин, а БВХ 9 и 22 обнуляются. В результате перед поступлением на вход устройства первого периода сигнала управляемый аттенюатор 1 с гиперболической зависимостью коэффициента усиления Кп управляющего напряжения имеет максимальный коэффициент усиления
5
К,
W, 1/И
о макс мим (что в условиях отсутствия априорной информации о характере сигнала x(t) необходимо для обеспечения максимальной чурствительности схемы) , а смещение на смещающем сумматоре 2 равно нулю S0 0.
515
Входной сигнал на n-м периоде на- блюдения через управляемый аттенюатор 1 и смещающий сумматор 2 поступает на входы блоков 3 и 4 определения максимального и минимального уровней сигналов, на выходах которых к концу заданного временного интервала Т,.
Z,
формируются напряжения Zn и
п
п ин пропорциональные максимальному и мини
мальному уровням сигнала Z(t)
Kn( x(t) + S n-i на этом интервале
времени (фиг. 2б,.в).
Индекс п показывает, что результаты измерения относятся к n-му периоду Кп( - коэффициент передачи управляемого аттенюатора 1 в предшествующий период наблюдения (n-1); Sn, - смещение на смещающем сумматоре 2 в момент (п-1). Для первого периода входного сигнала п 1 эти значения-соответствуют начальным условиям: Kh , 1, S0 . На выходах первого вычита- теля 5 и первого сумматора 6 формируются напряжения, пропорциональные соответственно величинам bZn
21ма« 2п«ини Z 2Пмоис+ ZIIMMH- Разностный сигнал А 7, п поступает
на удвоитель напряжения 8 и вход пятого БВХ 9. На выходе второго блока 19-деления образуется отношение сигналов /ип..,,, так как и„.г находится в шестом БВХ 18 и поступает на вход делимого второго блока 19 деления. Результат операции деления поступает на второй вход второго перемножителя 10, где образуется произведение &Zn,- /Un, . При условии гиперболической зависимости Kn 1/Un произведение A Z,- и„.г /и„, есть число fiZn, , полученное на предыдущем шаге стабилизации, но приведенное к текущему коэффициенту усиления К„.,. Тогда разность, получаемая на третьем вычитателе 11 (2uZh - UZn, ), есть
экстраполяция выходного сигнала Zn+, на будущий такт работы, которая и берется за основу для вычисления коэффициента усиления Кп . Эта разность (2iZn - u zj,., ) поступает на первый элемент 12 сравнения. Здесь осуществляется сравнение требуемого диапазона выходного сигнала jf L 1,с поступившим сигналом (24Zn-&.Zh, ) и формируется ошибка по размаху Јп - (2bZn UZn-i ). Этот сигнал через усилитель 13 с коэффициентом усиления Ь поступает на устройство обратный связи, образованное вторым сум0
5
Q
5
0
5
0
5
0 матором 14, первым перемножителем 15, первым 16 и вторым 17 БВХ. По окончании интервала Тп на управляющий вход устройства подается короткий стробирующий сигнал, по переднему фронту которого первый одновибратор 24 формирует импульс, на время которого первый БВХ 16 переходит в режим выборки и запоминает значение сигнала Un Un, (1 +pfn), сформировавшегося на выходе перемножителя. Значение управляющего напряжения ип,, хранится во втором БВХ 17 после окончания вычислений на предыдущем (п-1)-м периоде. По заднему фронту импульса первого одновибратора 24 формируется импульс третьего одновибратора 26, которым в пятый BRX 9 производится запись разности Л определенной на n-м такте работы устройства, а в шестом БВХ 18 записывается значение управляющего напряжения Un, . По заднему фронту импульса третьего одно- вибратора 26 второй одновибратор 25 формирует импульс (фиг. 3), на время которого в режим выборки переходит второй БВХ 17 и запоминает значение управляющего напряжения Un, вычисленное на настоящем периоде и хранящееся в первом БВХ 16. Сигнал Un с выхода второго БВХ 17 управляет коэффициентом передачи К управляемого аттенюатора 1 в соответствии с законом Kn 1/Un. В результате в течение (п+1)-го периода наблюдения входного сигнала x(t) величина коэффициента передачи управляемого аттенюатора 1 определяется результатами измерения максимума и минимума сигнала Z(t) на периоде Тп и введенной добавки, полученной с учетом динамики сигнала между двумя предыдущими измерениями. Процесс перестройки коэффициента передачи управляемого аттенюатора 1 приводит к установке такого значения U, при котором ошибка по размаху становится равной нулюЈп 0, а размах выходного сигнала - заданной величине 1 .
Суммарный сигнал Zl Zn с выхода первого сумматора 6 поступает на прямой вход второго вычитателя 7. На инвертирующий вход этого вычитателя поступает сигнал Sn.( с выхода второго элемента 23 сравнения. В результате, на выходе второго вычитателя 7, коэффициент передачи которого по неинертирующему входу равен 1/2, формиуется уровень напряжения Е 2 2„/ 2 - Sh-t, представляющего собой поусумму максимума и минимума (т.е. j еличину смещения относительно нуля ередины динамического диапазона) выодного сигнала без учета смещения S „, , вычисленного на предыдущем (п-1)-м такте, и вносимого смещающим 10 сумматором 2 сигнала на данном такте . Иначе говоря, эта величина представляет собой смещение относительно нуля середины динамического диапазона несмещенного сигнала на выходе уси- 5 ителя 1. Сигнал Еп поступает на вход блока 20 деления, который осуществляет пересчет смещения сигнала, полученного на основании результатов измерения на n-м периоде при коэффициен-20 те усиления , на коэффициент усиления К п, который установлен на (п+1)-м периоде: Vn En/(1+ ) . При поступлении на управляющий вход устройства стробирующего сигнала в момент окончания интервала Т, полученная с выхода устройства деления величина, представляющая собой смещение сигнала y(t) на выходе управляющего аттенюатора 1, пересчитанное 30 на новый коэффициент передачи К,,, записывается в третий БВХ 21. По сигналу с второго одновибратора 25 эта величина записывается также в четвертый БВХ 22 и на втором элементе 35 23 сравнения сравнивается с заданной величиной смещения середины динамического диапазона.
В результате, на выходе второго элемента 23 сравнения формируется 40 напряжение Sn 1/2 - Vn , пропорциональное смещению, которое необходимо дать сигналу, снимаемому с выхода управляемого аттенюатора 1 для того, чтобы середина динамического диапазо- 45 на выходного сигнала находилась на заданном уровне 1/2 (т.е. чтобы динамический диапазон выходного сигнала был заключен в заданных пределах от О до 1). Это смещение и подается на 50 второй вход смещающего сумматора 2.
Инерционность устройства, понимаемая как число шагов, необходимых для обработки входного воздействия, зависит от величины коэффициента . При 55 б 1 устройство безынерционно и обрабатывает любое возмущение входного сигнала за один такт. При этом наличие помехи приводит к частым переключениям и не обеспечивает стабильной работы устройства. Следовательно, при 0 1 система является незащищенной от воздействия помехи. Уменьшение коэффициента Э , достигаемое регулировкой коэффициента передачи усилителя 13, снижает влияние помехи, обеспечивая помехозащищенность устройства, но увеличивает инерционность.
f
ормула изобретения
Устройство стабилизации переменной и постоянной составляющих сигнала, содержащее последовательно соединенные управляемый аттенюатор, вход которого является входом устройства, смещающий сумматор, выход которого является выходом устройства, и соединенные по входам блок определения минимального уровня сигнала и блок определения максимального уровня сигнала, выходы которых соединены соответственно с входом вычитаемого и уменьшаемого первого вычитателя и входами первого сумматора, выход которого соединен с входом уменьшаемого второго вычитателя, соединенные последовательно первый элемент сравнения, инверсный вход которого является входом сигнала задания динамического диапазона стабилизации, усилитель, второй сумматор, другой вход которого является входом сигнала единичного уровня, первый перемножитель, первый блок выборки и хранения (БВХ), управляющий вход которого соединен с выходом первого одновибратора, второй БВХ, управляющий вход которого соединен с выходом второго одновибратора, а выход соединен с управляющим входом управляемого аттенюатора и другим входом первого перемножителя, соединенные последовательно первый блок деления, входы делимого и делителя которого соединены соответственно, с выходами второго вычитателя и второго сумматора, третий БВХ, управляющий вход которого соединен с выходом первого одновибратора, и четвертый БВХ, управляющий вход которого соединен с выходом второго одновибратора, второй элемент сравнения, инверсный вход которого соединен с выходом четвертого БВХ, а прямой вход является входом сигнала задания уровня стабилизации, причем выход второго элемента сравнения соединен с входом
вычитаемого второго вычитателя и втб рым входом смещающего сумматора, при этом вход первого одновибратора, являющийся управляющим входом устройст- ва, соединен с управляющими входами блоков определения максимального и минимального уровней сигнала, о т- личаюцееся тем, что, с целью повышения точности стабилизации, в него введены последовательно соединенные удвоитель напряжения и третий вычитатель, включенные между выходом первого вычитателя и входом первого элемента сравнения, последовательно
соединенные пятый БВХ и второй перемножитель, включенные между выходом первого вьгчитателя и входом вычитаемого третьего вьгчитателя, второй блок деления, включенный между выходом второго БВХ и вторым входом второго перемножителя, третий одновибратор, включенный между выходом первого и входом второго опновибраторов, и шестой БВХ, включенный между выходом второго БВХ и входом делимого второго блока деления, при этом управляющие входы пятого и шестого БВХ подключены к выходу третьего одновибратора.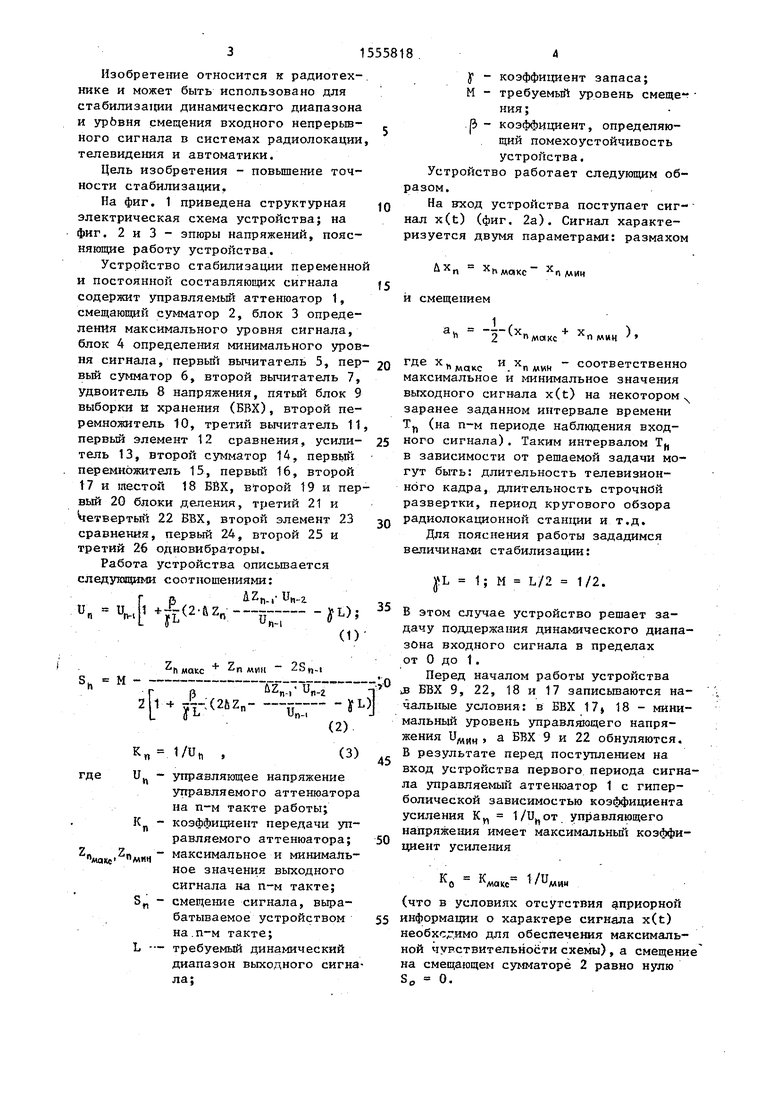

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство стабилизации динамического диапазона сигнала | 1985 |
|
SU1298857A1 |
| Адаптивный корректор многоканального сигнала с ортогональными составляющими | 1990 |
|
SU1807571A1 |
| Устройство стабилизации динамического диапазона сигнала | 1986 |
|
SU1480096A1 |
| Приемник двоичных символов | 1989 |
|
SU1656692A1 |
| Автодинное устройство | 1991 |
|
SU1811614A3 |
| Устройство для измерения защищенности сигнала от помех | 1988 |
|
SU1570006A1 |
| Электромагнитный дифференциальный датчик | 1984 |
|
SU1234101A1 |
| Цифровой измеритель мощности переменного тока | 1988 |
|
SU1613966A1 |
| Устройство компенсации узкополосных помех | 1989 |
|
SU1764166A1 |
| Электронный измеритель мощности и энергии | 1988 |
|
SU1638653A1 |
Изобретение относится к радиотехнике. Цель изобретения - повышение точности стабилизации. Устройство содержит управляемый аттенюатор 1, смещающий сумматор 2, блоки 3 и 4 определения максимального и минимального уровней сигнала, вычитатели 5 и 7, сумматоры 6 и 14, эл-ты 12 и 23 сравнения, усилитель 13, перемножитель 15, блоки выборки и хранения (БВХ) 16, 17, 21 и 22, блок 20 деления, одновибраторы 24 и 25. Цель достигается введением удвоителя 8 напряжения, БВХ 9 и 18, перемножителя 10, вычитателя 11, блока 19 деления и одновибратора 26, с помощью которых осуществляется процесс перестройки коэф. передачи аттенюатора 1. Это приводит к установке такого значения управляющего напряжения, при котором ошибка по размаху становится равной нулю, а размах выходного сигнала - заданной величине. 3 ил.
I
ънте
ания{
Ш.1
29
31
Г я;
30
ФигЗ
| Устройство стабилизации динамического диапазона сигнала | 1985 |
|
SU1298857A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
