Изобретение относится к радиотехнике и может быть использовано для стабилизации динамического диапазона и уровня смещения входного непрерывного сигнала в радиолокации, телевидении, автоматике.
Цель изобретения - повышение точности при изменении постоянной и переменной составляющих входного сигнала.
На фиг. 1 представлена структурная электрическая схема устройства стабилизации динамического диапазона сигнала; на фиг. 2 и 3 - эшоры напря10
- коэффициент 1 1; а- коэффициент, учитывающий случайные возмущения сигнала и определяющий инерционность устройства, 1. На вход устройства поступает сигнал X(t), показанный на фиг. 2 а. Си нал характеризуется двумя параметрами: размахом R Х,- и сме
X.ii;u.iojic... рпр X
ri2 KMCU
- соответственно максимальное и минимальное значения входного сигнала X(t) на некотором заранее
щением а, и
жений, поясняющие работу устройства. 5 заданном интервале времени пТ (на п-м
Устройство стабилизации динамического диапазона сигнала содержит элемент 1 с регулируемым коэффициентом передачи, третий.сумматор 2, блок 3 определения максимального уровня сиг- 20 нала, блок 4 определения минимального уровня сигнала, первый вычита- тель 5, первый сумматор 6, третий вычитатель 7, весовой усилитель 8, второй сумматор 9, перемножитель 10, первый блок 11 выборки и хранения, второй блок 12 выборки и хранения, второй Бычитатель 13, блок 14 деления, третий блок 15 выборки и хранения, четвертый блок 16 выборки и хра- нения, четвертый вычитатель 17, блок 18 формирования управляющих импульсов и,кроме того, второй 19 и первый 20 одновибраторы.
периоде наблюдения входного сигнала) . Таким интервалом Т в зависимости от решаемой задачи могут быть дли тельность телевизионного кадра, длительность строчной развертки, период кругового обзора радиолокационной станции и т.д.
хч
Для пояснения работы зададимся следующими значениями: L ); М 5 L/2 1/2. В этом случае устройство решает задачу поддержания динамического диапазона выходного сигнала в пределах от О до 1.
. Перед началом работы устройства во второй блок 12 записывается минимальный уровень управляющего напряжения Ujj,H, а четвертый блок 16 обнуляется. В результате перед поступлением на вход устройства первого пеУстройство работает следующим об- 35.риода сигнала X(t) элемент 1 с гиперболической зависимостью коэффициента усиления К 1/и от управляющего напряжения имеет максимальный крэфразом.
Управление элементом 1 происходит в соответствии со следующими выражениями
и
Sft
Р(|г- Oi М Zijio «i5 i3UH.i2Stva
(1) 40
zn pcfl О
(2)
фициент усиления К, ( ° в условиях отсутствия априорной информации о характере сигнала X(t) необходимо для обеспечения максимальной чувствительности), а смещение на третьем сумматоре 2 равно нулю 8 0.
К где и,
1/и„,
(3) 451
фициент усиления К, ( ° в условиях отсутствия априорной информации о характере сигнала X(t) необходимо для обеспечения максимальной чувствительности), а смещение на третьем сумматоре 2 равно нулю 8 0.
hMftKc
uZ.
Входной сигнал на п-м периоде наблюдения через элемент 1 и третий сумматор 2 поступает на входы блоков 3 и 4, на выходах которых к концу Q заданного временного интервала пТ
управляющее напряжение элемента 1 на п-м такте;
К - коэффициент передачи элемента 1 ;
максимальное и минимальное значения выходного сигнала на п-м такте; п-макс п.мим симуму И минимуму сигнала Z(t)
S - смещение сигнала на п-м так- X(t) S.., на этом интервале
те;55 времени (фиг. 2 б, в). Индекс п поL - заданньй уровень динамичес- казывает, что результаты измерения
кого диапазона стабилизации; относятся к п-му периоду, К ,.- ко- М - заданный уровень стабилиза- эффициент передачи элемента 1 в пред- ции;. шествующий период наблюдения п-1;
формируется напряжение мий пропорциональное соответственно мак
- коэффициент 1 1; а- коэффициент, учитывающий случайные возмущения сигнала и определяющий инерционность устройства, 1. На вход устройства поступает сигнал X(t), показанный на фиг. 2 а. Сигнал характеризуется двумя параметрами: размахом R Х,- и сме X.ii;u.iojic... рпр X
ri2 KMCUJC
- соответственно максимальное и минимальное значения входного сигнала X(t) на некотором заранее
щением а, и
0
периоде наблюдения входного сигнала) . Таким интервалом Т в зависимости от решаемой задачи могут быть длительность телевизионного кадра, длительность строчной развертки, период кругового обзора радиолокационной станции и т.д.
хч
Для пояснения работы зададимся следующими значениями: L ); М 5 L/2 1/2. В этом случае устройство решает задачу поддержания динамического диапазона выходного сигнала в пределах от О до 1.
. Перед началом работы устройства во второй блок 12 записывается минимальный уровень управляющего напряжения Ujj,H, а четвертый блок 16 обнуляется. В результате перед поступлением на вход устройства первого пе1
фициент усиления К, ( ° в условиях отсутствия априорной информации о характере сигнала X(t) необходимо для обеспечения максимальной чувствительности), а смещение на третьем сумматоре 2 равно нулю 8 0.
451
Входной сигнал на п-м периоде наблюдения через элемент 1 и третий сумматор 2 поступает на входы блоков 3 и 4, на выходах которых к концу Q заданного временного интервала пТ
симуму И минимуму сигнала Z(t)
формируется напряжение мий пропорциональное соответственно мак312988374
S. - смещение на третьем сумматоре 2 да четвертого вычитателя 17. В результате на выходе второго вычитателя 13, коэффициент передачи, которого по вхов момент п-1. Для первого периода входного сигнала п 1 эти значения co(jTBeTCTByroT начальным условиям: К . К ; S., 5д . На выходах первого вычитателя 5 и первого сумматора 6 формируются напряжения, пропорциональные соответственно величинам AZ
ду уменьшаемого равен 1/2, формируется уровень напряжения Е представляющего собой полусумму максимума и минимума (т.е. величину смещения относительно нуля середины динамического диапазона) выходного си1- fO нала без учета смещения S,. , вычисленного на предыдущем (п-О-м такте и вносимого тpeтьи сумматором 2 сигнала на данном п. Иначе говоря, эта величина представляет собой сме-
Z - Z
Пмакс ti ИНН
5. Z - i
Разностный сигнал aZ поступает
ду уменьшаемого равен 1/2, формируется уровень напряжения Е представляющего собой полусумму максимума и минимума (т.е. величину смещения относительно нуля середины динамического диапазона) выходного си1- fO нала без учета смещения S,. , вычисленного на предыдущем (п-О-м такте и вносимого тpeтьи сумматором 2 сигнала на данном п. Иначе говоря, эта величина представляет собой сме-
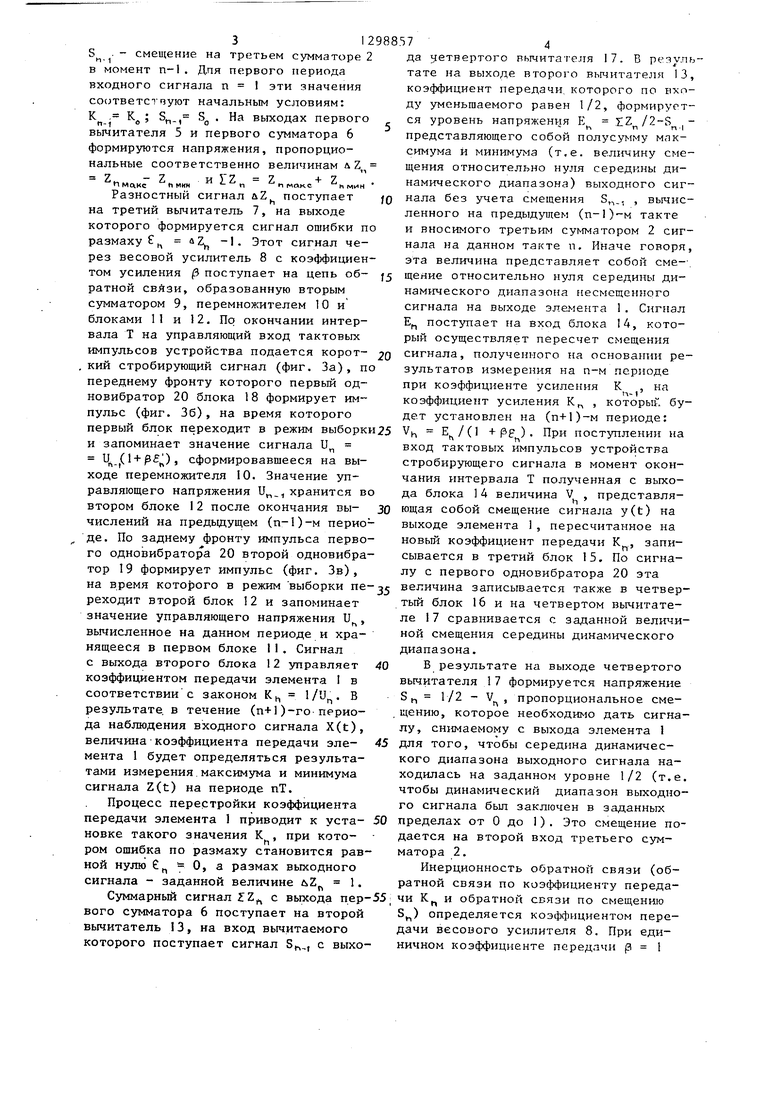
на третий вычитатель 7, на выходе которого формируется сигнал ошибки по размаху f, Этот сигнал через весовой усилитель 8 с коэффициентом усиления |3 поступает на цепь об- 15 щение относительно нуля середины ди- ратной свйзи, образованную вторым намргческого диапазона несмещенного сумматором 9, перемножителем 10 и сигнала на выходе элемента 1. Сигнал блоками II и 12, По окончании интер- Е, поступает на вход блока 14, кото- вала Т на управляющий вход тактовых рый осуществляет пересчет смещения импульсов устройства подается корот- 20 сигнала, полученного на основании ре- , кий стробирующий сигнал (фиг. За), по переднему фронту которого первьш од- новибратор 20 блока 18 формирует импульс (фиг. 36), на время которого первый блок переходит в режим выборки25 V (1 + PF ) . При пост ттлении на
И запоминает значение сигнала и вход тактовых импульсов устройства U (l + p5j), сформировавшееся на вы- стробирующего сигнала в момент окон- ходе перемножителя 10. Значение управляющего напряжения U,., хранится во
втором блоке 12 после окончания вы- 30 ющая собой смещение сигнала y(t) на числений на предыдущем (п-1)-м перио- выходе элемента 1, пересчитанное на , де. По заднему фронту импульса первого одновибратора 20 второй одновибра- тор 19 формирует импульс (фиг. Зв), на время которого в режим выборки пе- величина записывается также в четвер- реходит второй блок 12 и запоминает тый блок 16 и на четвертом вычитателе I7 сравнивается с заданной величиной смещения середины динамического
зультатов измерения на п-м периоде при коэффициенте усиления К , на коэффициент усиления К, , которык будет установлен на (п+1)-м периоде:
чания интервала Т полученная с выхода блока 14 величина V , представляновьш коэффициент передачи К, записывается в третий блок 15, По сигналу с первого одновибратора 20 эта
значение управляющего напряжения U, вычисленное на данном периоде и хранящееся в первом блоке II. Сигнал с выхода второго блока 12 управляет коэффициентом передачи элемента I в соответствии с законом К, l/ J,. В результате, в течение (п+1 )-го-периода наблюдения входного сигнала X(t), величина коэффициента передачи элемента 1 будет определяться результатами измерения.максимума и минимума сигнала Z(t) на периоде пТ.
Процесс перестройки коэффициента
диапазона.
40
Б результате на выходе четвертого вычитателя 17 формируется напряжение S f, 1/2 - V , пропорциональное смещению, которое необходимо дать сигналу, снимаемому с выхода элемента 1 45 для того, чтобы середина динамического диапазона выходного сигнала находилась на заданном уровне 1/2 (т.е. чтобы динамический диапазон выходного сигнала был заключен в заданных передачи элемента 1 приводит к уста- 50 пределах от О до 1). Это смещение подается на второй вход третьего сумматора 2.
Инерционность обратной связи (обновке такого значения К, при котором ошибка по размаху становится равной нулю f, - О, а размах выходного
сигнала - заданной величине uZ 1. ратной связи по коэффициенту передаСуммарный сигнал ZZ с выхода пер-55; чи К и обратной связи по смещению вого сумматора 6 поступает на второй S) определяется коэффициентом пере- вычитатель 13, на вход вычитаемого дачи весового усилителя 8. При еди- которого поступает сигнал Sf,,, с выхо- яичном коэффициенте передачи (3 1
ду уменьшаемого равен 1/2, формируется уровень напряжения Е представляющего собой полусумму максимума и минимума (т.е. величину смещения относительно нуля середины динамического диапазона) выходного си1- нала без учета смещения S,. , вычисленного на предыдущем (п-О-м такте и вносимого тpeтьи сумматором 2 сигнала на данном п. Иначе говоря, эта величина представляет собой сме-
щение относительно нуля середины ди- намргческого диапазона несмещенного сигнала на выходе элемента 1. Сигнал Е, поступает на вход блока 14, кото- рый осуществляет пересчет смещения сигнала, полученного на основании ре- V (1 + PF ) . При пост ттлении на
щение относительно нуля середины ди- намргческого диапазона несмещенного сигнала на выходе элемента 1. Сигнал Е, поступает на вход блока 14, кото- рый осуществляет пересчет смещения сигнала, полученного на основании ре- V (1 + PF ) . При пост ттлении на
зультатов измерения на п-м периоде при коэффициенте усиления К , на коэффициент усиления К, , которык будет установлен на (п+1)-м периоде:
вход тактовых импульсов устройства стробирующего сигнала в момент окон-
чания интервала Т полученная с выхода блока 14 величина V , представляющая собой смещение сигнала y(t) на выходе элемента 1, пересчитанное на величина записывается также в четвер- тый блок 16 и на четвертом вычитатеновьш коэффициент передачи К, записывается в третий блок 15, По сигналу с первого одновибратора 20 эта
диапазона.
Б результате на выходе четвертого вычитателя 17 формируется напряжение S f, 1/2 - V , пропорциональное смещению, которое необходимо дать сигналу, снимаемому с выхода элемента 1 для того, чтобы середина динамического диапазона выходного сигнала находилась на заданном уровне 1/2 (т.е. чтобы динамический диапазон выходно512988576
сигнал ошибки на вход цепи обрат-вычитателя, соединенные последованой связи проходит полностью и обрат-тельно третий вычитатель, вход уменьные связи в это время являются без-шаемого которого соединен с выходом
ынерционными. При изменении коэффи-первого вычитателя, а вход вычитаемоциента передачи на вход цепи обрат- го явгяется входом сигнала задания
ной связи поступает лишь часть ошиб-динамического диапазона стабилизации,
ки С (сигнал ошибки поступает с ве-весовой усилитель, второй сумматор,
сом, меньшим единицы), за счет чегодругой вход которого является входом
инерционность обратных связей воз-сигнала единичного уровня, перемножирастает, снижается при этом быстро- Ютель, первьй блок выборки и хранения,
действие и возрастает помехозащищен-управляющий вход которого соединен с
ность устройства. Поэтому выбор ве-первым выходом блока формирования упличины коэффициента передачи про-равляющих импульсов, и второй блок
изводится с учетом требования по быст-выборки и хранения, управляющий вход
родействию и помехозащищенности рабо- t5которого соединен с вторым выходом
ты устройства.блока формирования управляющих импульсов, а выход соединен с управляю- Формула изобретения
, Iщим входом элемента с регулируемым
Устройство стабилизации динамичес- коэффициентом передачи и другим вхо- кого диапазона сигнала, содержащее 20 дом умножителя, соединенные последо- элемент с регулируемым коэффициентом вательно блок деления, входы делимо- передачи, вход которого является вхо- го и делителя которого соединены содом устройства, первый и второй вы- ответственно с вьВсодами второго вы- читатели, соединенные по входам блок читателя и второго сумматора, третий определения минимального уровня сиг- блок выборки и хранения, управляющий нала и блок определения максимального вход которого соединен с первым вьпсо- уровня сигнала, выходы которых соеди- дом блока формирования управляющих йены соответственно с входом вычита- импульсов, и четвертый блок выборки емого и уменьшаемого первого вычита- и хранения, управляющий вход которого теля, отличающееся тем, соединен с вторым выходом блока фор- что, с целью повьшгения точности при мирования управляющих импульсов, со- изменении постоянной и переменной со- единенные последовательно четвертый ставляющих входного сигнала, в него вычитатель, вход вычитаемого которого введены блок формирования управляющих соединен с выходом четвертого блока импульсов, вход которого является 35 выборки и хранения, вход уменьшаемого входом тактовых импульсов устройства, является входом сигнала задания уров- и соединен с управляющими входами ня стабилизации, а выход соединен с блока определения минимального уров- выходом вычитаемого второго вычитате- ня сигнала и блока определения макси- ля, и третий сумматор, другой вход мального уровня сигнала, первый сум- 40 которого соединен с выходом элемента матор, первый и второй входы которого с регулируемым коэффициентом передачи, соединены соответственно с выходами а выход является выходом устройства блока определения минимального уров- и соединен с входами блока определе- ня сигнала и блока определения макси- ния минимального уровня сигнала и бло- мального уровня сигнала, а выход со- 45 ка определения максимального уровня единен с входом уменьшаемого второго сигнала.
п mufij
Фи.З
Составитель Н Мельников Редактор В. Петраш Техред А.Кравчук
Заказ 896/57 Тираж 902Подписное
ВНИИШ Государстйенного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 2
Корректор А. Обручар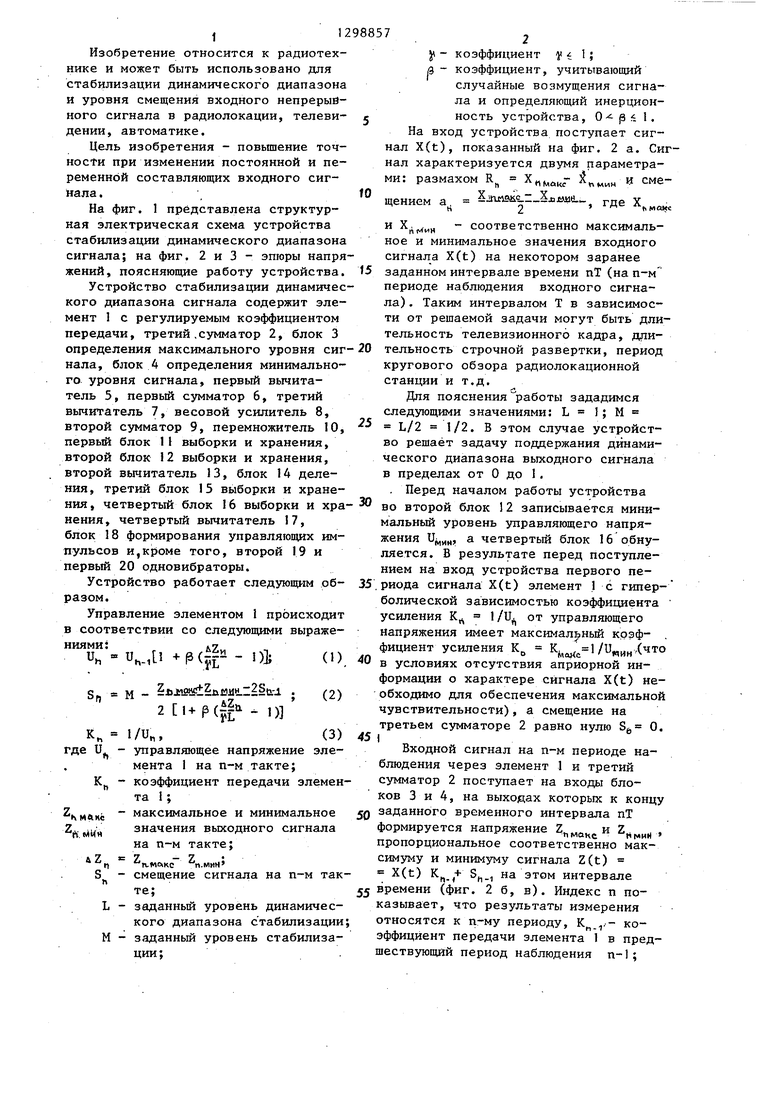
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство стабилизации переменной и постоянной составляющих сигнала | 1988 |
|
SU1555818A1 |
| Устройство стабилизации динамического диапазона сигнала | 1986 |
|
SU1480096A1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫЙ КАНАЛ ГИДРОАКУСТИЧЕСКОЙ ЦИФРОВОЙ ПРИЕМНОЙ СИСТЕМЫ | 1994 |
|
RU2077066C1 |
| Цифровой фильтр | 1987 |
|
SU1390784A1 |
| Устройство для кодирования аналоговых сигналов | 1989 |
|
SU1624696A1 |
| Умножитель частоты импульсов | 1978 |
|
SU780175A1 |
| Кодирующий преобразователь | 1989 |
|
SU1755376A1 |
| Дискретно-аналоговый фурье-преобра-зОВАТЕль | 1979 |
|
SU834582A1 |
| КОМПЛЕКСНАЯ СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2022297C1 |
| Устройство для воспроизведения аналогового сигнала | 1988 |
|
SU1524175A1 |
Из обретение относится к радиотехнике. Цель изобретения - повьше- ние . точности при изменении постоянной и переменной составляющих входного сигнала. Устройство содержит элемент 1 с регулируемым коэф. передачи, сумматоры 2; 6 и 9, блоки 3 и 4 определения максимального и минимального уровня сигнала, вычитате- ли 5, 7, 13 и 17, весовой усилитель 8, перемножитель 10, блоки 11, 12, 15 и 16 выборки и хранения, блок 14 деления и блок 18 формирования управляющих импульсов. Цель достигается путем формирования напряжения, пропорционального смещению, которое необходимо дать сигналу, снимаемому с выхода элемента 1, для того чтобы середина динамического диапазона выходного сигнала находилась на заданном уровне 1/2, т.е. чтобы динамический диапазон выходного сигнала был заключен в заданных пределах от О до 1. 3 ил. и МХСЯ to со СО 00 О1 -4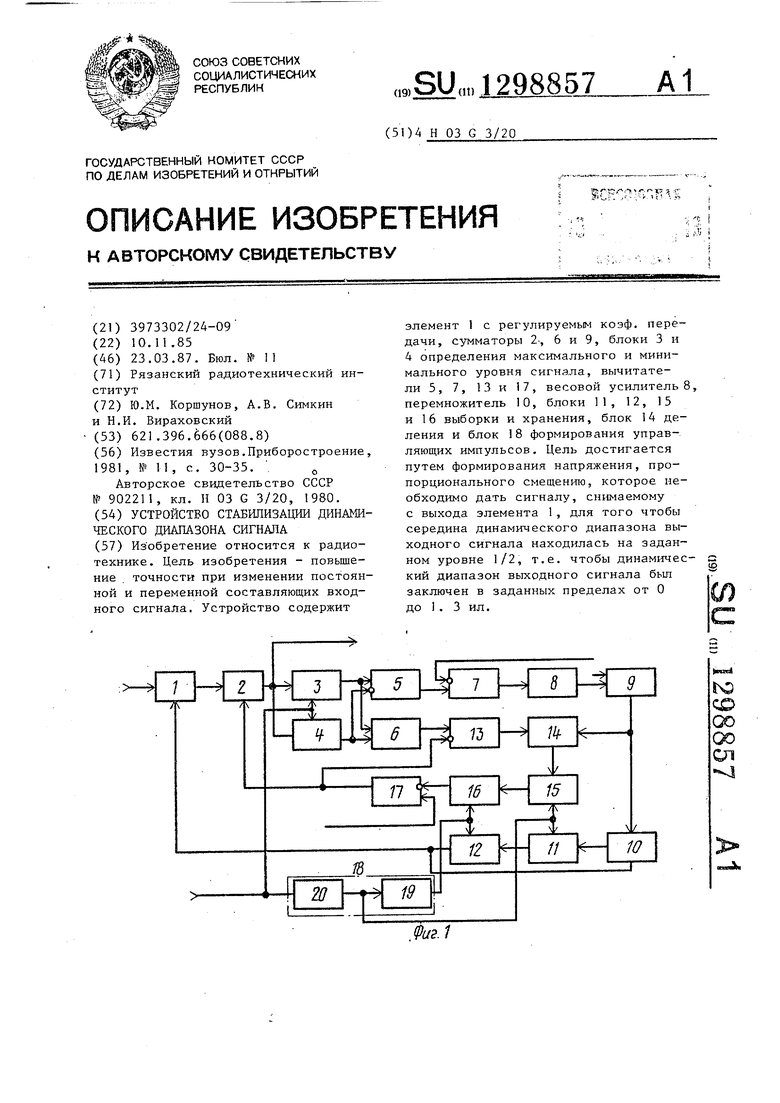
| Известия вузов.Приборостроение, 1981, № 11, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Устройство автоматической установки коэффициента передачи | 1980 |
|
SU902211A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
