Изобретение относится к подъемно- транспортному машиностроению, в частности к устройствам для контроля натяжения гибкого тягового органа.
Цель изобретения увеличение срока службы гибкого тяговопо органа.
На фиг. 1 изображен общий вид устройства для контроля натяжения гибкого тягового органа; на фиг. 2 - разрез А-А на фиг. 1.
Устройство для контроля натяжения гибкого тягового органа 1 содержит шкив 2 и прижимной механизм, выполненный в виде роликов 3, взаимосвязанных посредством осей k с прижимной роликовой цепью 5 Один конец роликовой цепи 5 соединен с неподвижной опорой 6 посредством пружины 7 другой конец соединен через рычаг 8, на конце ко- торого подвешен груз 9, с поршнем 10 пружинно-гидравлического привода 11, связанного с электрогидравлическим регулятором давления 12, соединенным посредством цепи управления 13 с дат- чиком 1 натяжения тягового органа. Прижимные ролики 3 снабжены соосно расположенными с ними дополнительными прижимными роликами 15} опирающимися в исходном положении на верхнюю часть клинообразного выступа 16 направляющей 17, закрепленной над шкивом 2.
На концах направляющей выполнены пазы 18 для крайних роликов,
Устройство работает следующим образом.
При отсутствии скольжения тягового органа 1 по шкиву 2 ролики 15 опираются на верхнюю часть клинообразного выступа 16 направляющей 17 удер живаясь в таком положении пружиной 7 находящейся в сжатом состоянии. При расположении роликов 15 в верхней части клинообразного выступа 16 установленные на одной оси с ними и с соеди- нительными звеньями цепи 5 ролики 3 не касаются тягового органа 1
Таким образом, вес прижимных роликов 3 и цепей 5 не передается на тя- говый орган 1 а воспринимается через обкатывающие ролики 15 направляющей 17. Следовательно, ролики 3 не касаются тягового органа 1 и не изнашивают его.
При отсутствии скольжения тягового органа 1 по шкиву 2 ролики 3 не вращаются, следовательно, их подшипниковые узлы не будут интенсивно выходить
о
0
0 5
5
из строя и будет исключен шум у рабочего места обслуживающего персонала.
При появлении скольжения тягового органа 1 по шкиву 2, сигнал подается в цепь управления 13 электрогидравлического регулятора давления 12, воздействующего на пружинно-гидравлический привод 11.
В результате поршень 10 пружинно- гидравлического привода 11 опускается, рычаг 8 поворачивается относительно шарнирной опоры под действием силы веса груза 9 и воздействует на соединенный с ним конец цепи 5, перемещая ее в направлении опускающегося груза 9« При этом пружина 7 растягивается, а ролики 15 движутся по клинообразным выступам 1б направляющей 17 до соприкосновения роликов 3 с тяговым органом 1 и прижатия его к ручью футеровки шкива 2.
Ролики 155 расположенные в наклонных пазах 18 направляющей 17, перемещаются по внешней их поверхности до соприкосновения прижимных роликов 3 с тяговым органом 1 и прижатия роли- коз 3 к шкиву 2.
После исчезновения скольжения тягового органа 1 по шкиву 2 сигнал от датчика натяжения тягового органа подается в цепь управления 13 электрогидравлического регулятора давления 12, воздействующего на пружинно- гидравлический привод 11. В результате поршень 10 привода 11 поднимается, рычаг 8 поворачивается относительно своей шарнирной опоры, возвращаясь в исходное положение поднимая груз 9 и освобождая цепь 5, которая под действием пружины 7 перемещается в обратном направлении. При этом ролики
15движутся по клинообразным выступам
16направляющей 17 в противоположную сторону, а ролики 3 отходят от тягового органа, освобождая его. Крайние ролики 15 в этом случае перемещаются по внутренним поверхностям наклонных пазов 18 направляющей 17, отводя ролики 3 от тягового органа 1.
Формула изобретения
Устройство для контроля натяжения гибкого тягового органа подъемника, содержащее взаимодействующий с кана- товедущим шкивом прижимной механизм, состоящий из соединенных друг с другом посредством роликовой цепи прижимных роликов, причем один конец роли5155
ковой цепи связан с опорой, а другой - с приводом ее натяжения, отличающееся тем, что, с целью увеличения срока службы гибкого тягового органа, оно снабжено упругим элементом, расположенным между концом роликовой цепи и опорой, дополнительными прижимными роликами, смонтиоован70 36
ными соосно на каждом из основных при- прижимных роликов, и неподвижно закрепленной над шкивом дугообразной направляющей, причем на наружной поверхности направляющей выполнены клиновые выступы, а на концевых участках - профильные пазы для размещения на них основных прижимных роликов.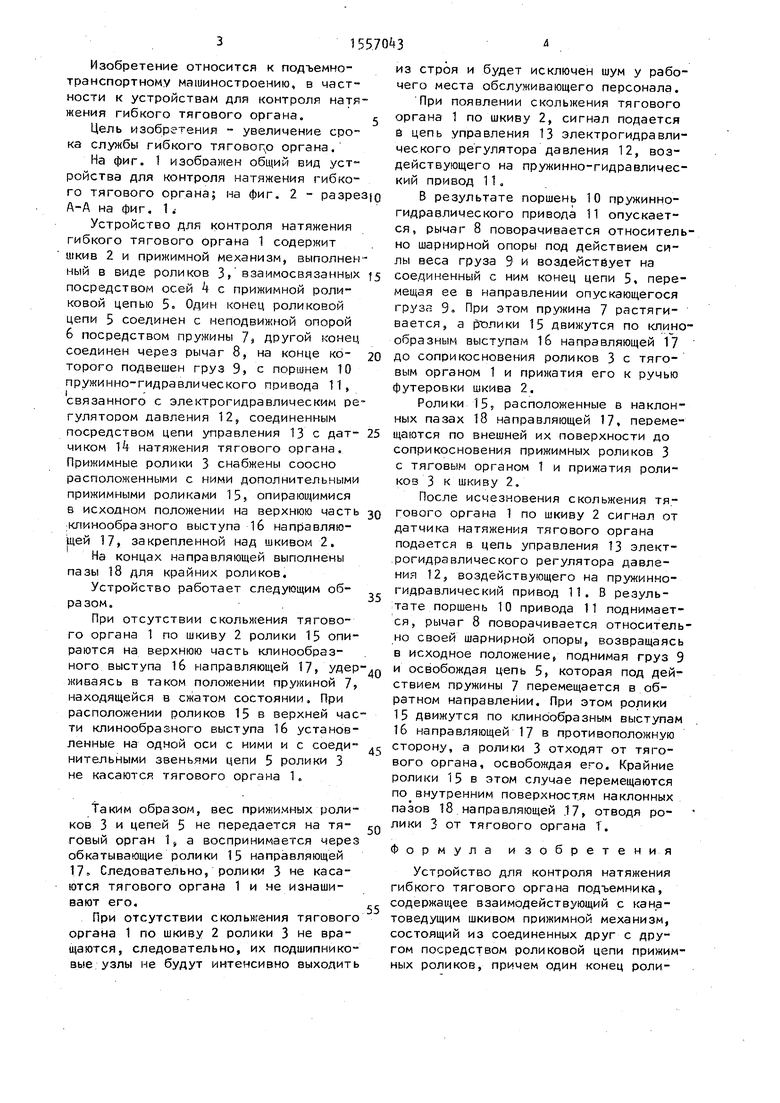
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1977 |
|
SU639792A1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| ШАХТНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2585132C2 |
| РУЧНАЯ БОРТОВАЯ ТАЛЬ | 1991 |
|
RU2016836C1 |
| ПОВОРОТНО-УДАРНЫЙ МЕХАНИЗМ Б.Н.СТИХАНОВСКОГО (ВАРИАНТЫ) | 1995 |
|
RU2095234C1 |
| МЕХАНИЗМ ДЛЯ ЗАКРЫВАНИЯ ОКОН И ДВЕРЕЙ | 1999 |
|
RU2180937C1 |
| Устройство для натяжения шлифовальной ленты | 1979 |
|
SU927485A1 |
| Конвейер | 1990 |
|
SU1751100A1 |
| КОЛЬЦЕВОЙ КОНВЕЙЕР | 2003 |
|
RU2255031C1 |
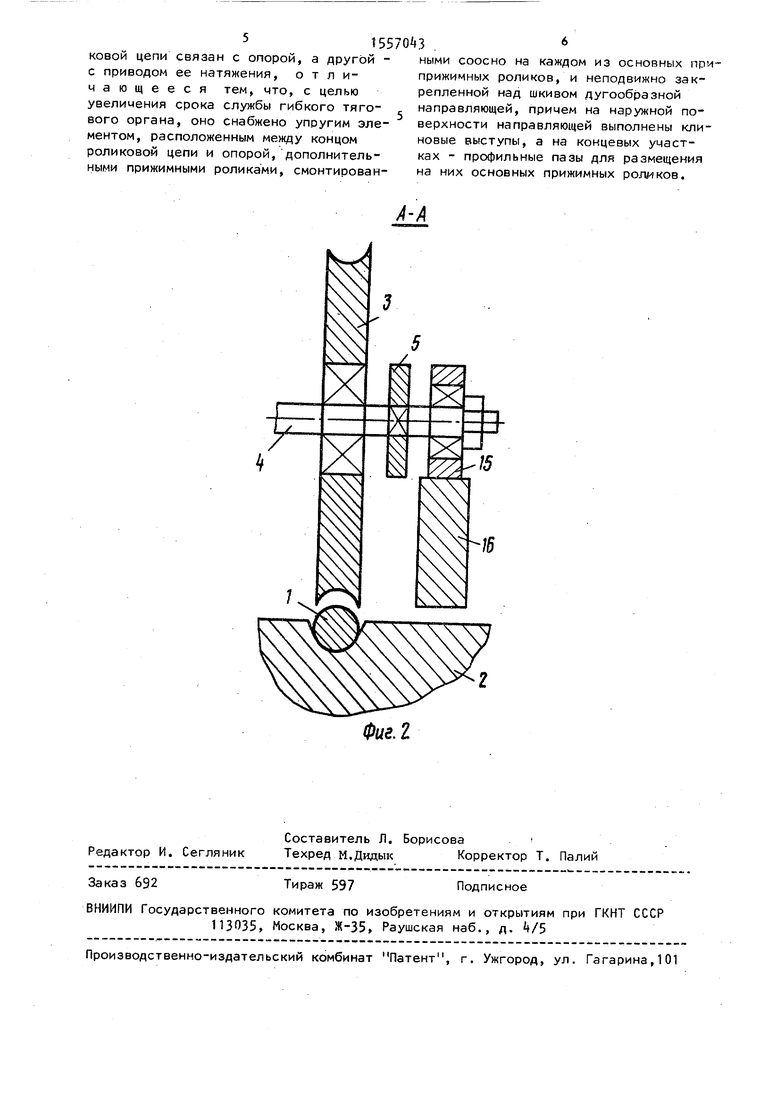
Изобретение относится к подъемно-транспортному машиностроению, в частности к устройствам для контроля натяжения гибкого тягового органа. Устройство для контроля натяжения гибкого органа 1 содержит шкив 2 и прижимной механизм, выполненный в виде роликов 3, взаимосвязанных посредством осей 4 с прижимной роликовой цепью 5. Один конец роликовой цепи 5 соединен с неподвижной опорой 6 посредством пружины 7, другой конец соединен через рычаг 8, на конце которого подвешен груз 9, с поршнем 10 пружинно-гидравлического привода 11. Привод 11 связан с электрогидравлическим регулятором давления 12, соединенным посредсовм цепи управления 13 с датчиком 14 напряжения тягового органа. Ролики 3 имеют соосно расположенные с ними прижимные ролики 15, опирающиеся в исходном положении на верхнюю часть клинообразного выступа 16 направляющей 17, закрепленной над шкивом 2 и выполненной в виде дуги. На концах направляющей выполнены наклонные пазы 18 для крайних прижимных роликов. 2 ил.
Составитель Л. Борисова Редактор И. Сегляник Техред М.ДидыкКорректор Т. Палий
Заказ 692
Тираж 597
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. /5
Фиг. 2
Подписное
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1977 |
|
SU639792A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
