Изобретение относится к приборо- и машиностроению и может быть использовано в шаговых исполнительных устройствах прецизионных автоматических систем.
Целью изобретения является повышение надежности фиксации и быстродействия включения фиксатора.
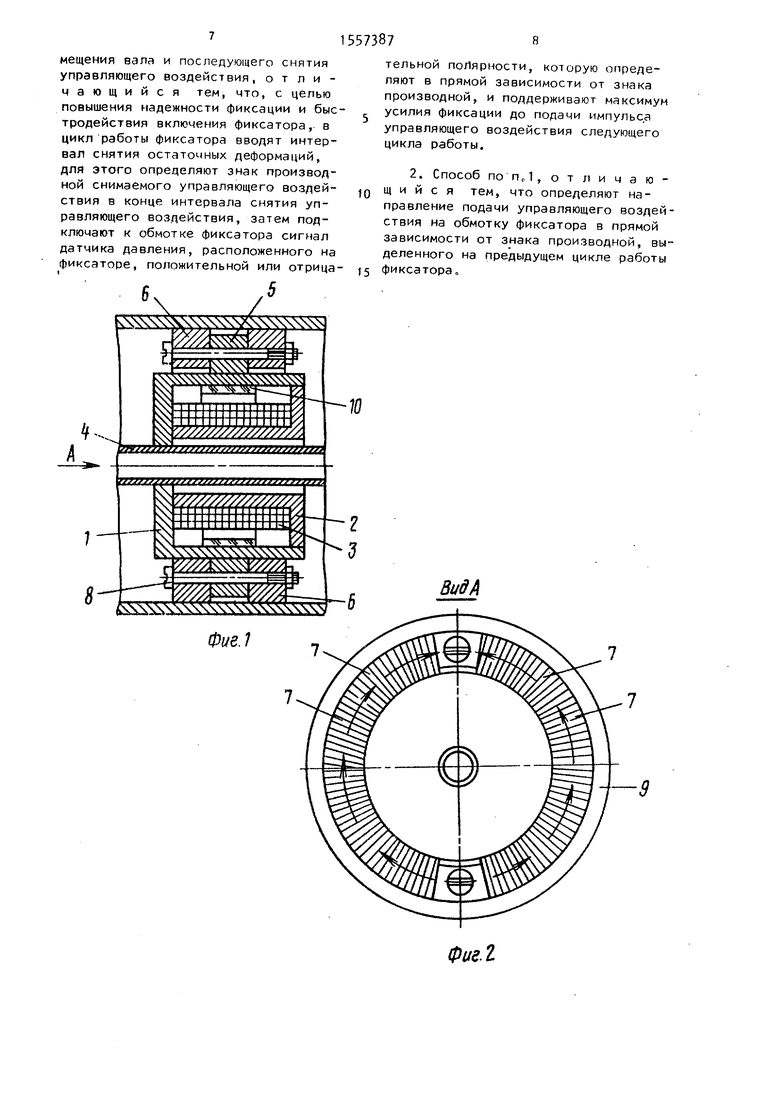
На фиг. 1 изображен магнитострик- ционный фиксатор, разрез; на фиг.2 - вид А на фиг. 1; на фиг. 3 графики следующих зависимостей: 1улР f(t) - зависимость изменения высокочастотного управляющего воздействия в обмотке фиксатора от времени; (ul/1 )j
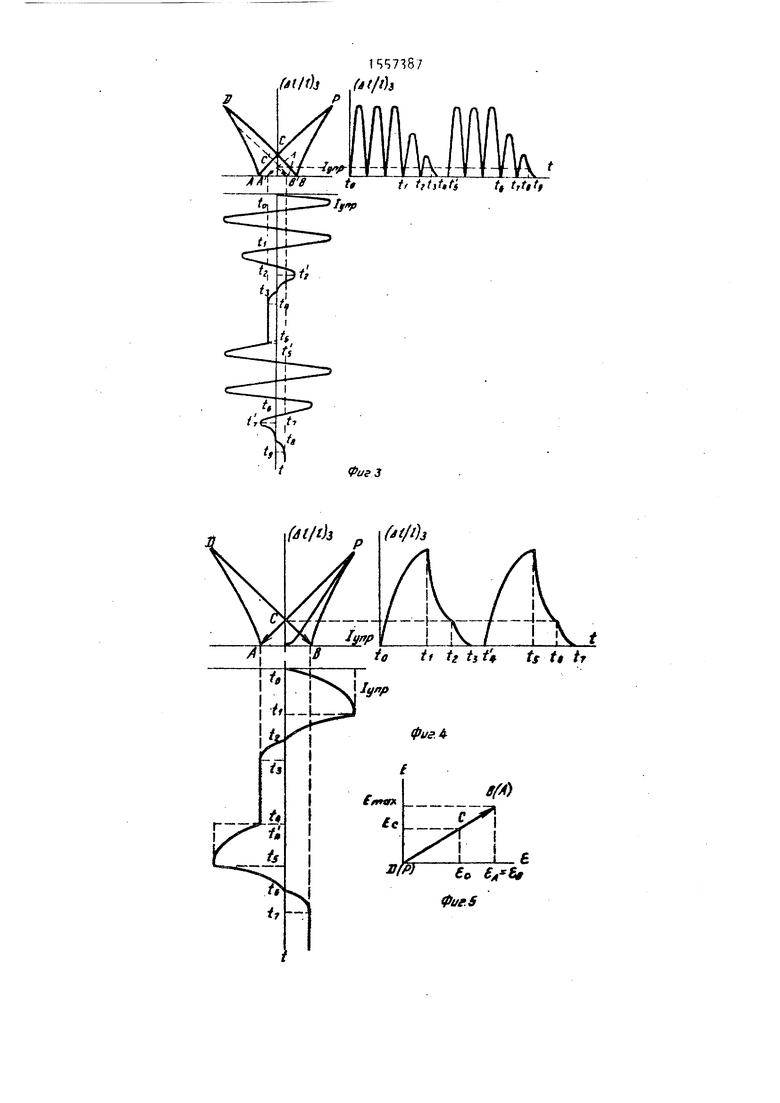
f (lynf ) - зависимость относительного изменения размера магнитострик- ционного Фиксатора или величины рабочего зазора от величины управляющего воздействия; (41/1 ) f(t) - зависимость относительного изменения рабочего зазора во времени, причем на зависимости Ul/l)j Ј(lyr,f ) пунктиром показан частичный процесс размагничивания фиксатора под влиянием свободно затухающего управляющего воздействия; на фиг. 4 - то же, только величина управляющего воздействия - импульс, подаваемый в обмотку фиксатора ; на фиг. 5 - график зависимости Е f(Ј) - ЭДС темСПСЛ
00 00 1
зодатчика давления от его деформации;, на фиг. 6 - схема устройства, реализующего способ управления.
Магнитострикционный фиксатор состоит из двух частей, одна из которых содержит стакан 1 и втулку 2 с цилиндрической обмоткой 3, причем стакан жестко закреплен на трубке k электрически деформируемого элемен- та, а другая - кольцо 5 и две намагничивающие системы 6, расположенные по торцам кольца с тороидальными обмотками 7 включенные встречно, причем кольцо и его намагничивающие сие- темы скреплены винтами 8 и установлены в направляющей 9, при этом датчик 10 давления расположен на внутренней поверхности стенки стакана 1.
Устройство (фиг.6), реализующее способ управления магнитострикционным фиксатором, содержит генератор 11 подачи импульса или высокочастотного управляющего воздействия, схему 12 выделения, ключ 13, блок И усилите- лей мощности, Магнитострикционный фиксатор 15, на котором расположен датчик 16 давления, сигнал которого через усилитель 17 с дифференциальным входом поступает обратно на ключ, усилитель мощности и обмотки фиксатора. При этом генератор 11 импульсов запускается или останавливается по сигналу V , причем полярность первого импульса из серии импульсов или полярность импульса подами определяется в прямой зависимости от знака производной (сигнала сГ)t а переключение ключа 13 на сигнал датчика давления происходит после затухания переход- ного процесса управляющего воздействия сигналом , длительность которого равна интервалу времени снятия остаточных деформаций с фиксатора.
На фиг. 2 показаны Два встречно направленных потока, замыкающихся через одну намагничивающую систему 6, винты 8 и кольцо 5.
На фиг. 3 показаны два цикла работы фиксатора, причем первый цикл t0 - tA больше второго t f - tg и на первом цикле можно отработать большее перемещение. При этом интервалы ta - t и t j- - t6 - интервалы подачи импульсов управляющего воздей ствия; t, - tj и t6 - te - интервалы снятия управляющего воздействия t - t и te - tj - интервалы снятия остаточных напряжений. Знак про
о Q
5
O
5
изводнои определяется на участке t, и t - tg конечного участка (четверть периода) затухающего управляющего воздействия. На фиг. 4 также показаны два цикла работы фиксатора, причем первый цикл t0 - t больше второго t 4 - t7 , при этом t - tf и if - tf - интервалы подачи импульса управляющего воздействия; t - ti и tf - t6 - интервалы снятия управляющего воздействия, на которых определяется знак производной для выбора направления подачи управляющего импульса на следующем цикле работы фиксатора; ti - tj и t6 - t7 - интерва- лы снятия остаточных деформаций фиксатора. За интервалы t - tj и t - t обеспечивается надежная фиксация трубки. График зависимости (/sl/L), f(t) получают из графика зависимости Iy,p f(t) отражением его от маг- нитомеханической характеристики маг- нитострикционного элемента.
Чем больше величина импульса или импульсов управляющего воздействия в обмотке фиксатора, тем больше остаточная деформация в нем после снятия управляющего воздействия, при этом точка С .(фиг.З и ) перемещается вверх по ординате (fll/l) , а точки А и В - влево и вправо по абсциссе соответственно. Если характер нагрузки упругий, то меняется наклон магнитомеханической характеристики и изменяют свое местоположение точки А, В и С на осях координат.
Сущность способа управления магнитострикционным фиксатором состоит в следующем.
В исходном состоянии обмотки фиксатора обесточены и между наружной контактной поверхностью стакана и внутренней поверхностью кольца действуют силы статического трения (либо посажены они друг на друга с натягом) .
Рассмотрим работу фиксатора по фиг. b и 5. При подаче импульса управляющего воздействия в обмотку фиксатора происходит образование рабочего зазора между кольцом и стаканом, позволяющего отрабатывать заданное перемещение. После снятия импульса управляющего воздействия рабочая точка магнитомеханической характеристики перемещается в точку С, характеризующую собой остаточные деформации Еа - - (il/Dj.c , которые снимаются на
интервале снятия управляющего воздействия (t - t, t6 - г.7) путем подачи положительной или отрицательной полярности сигнала датчика давления в прямой зависимости от знака производной снимаемого управляющего воздействия (t - tz , ts - t6). При этом рабочая точка магнитомеханичес- кой характеристики смещается к точке А или к точке В, где обеспечивается максимальное усилие фиксации. При подключении датчика давления в момент t2(t6) с него снимается ЭДС Ес, вызванная остаточными деформациями фиксатора Ј Хг - Јс (а 1/1)с.. Усиленный сигнал датчика давления приводит к уменьшению остаточных деформаций Ј0сг и к ЈЩе большей деТаким образом, предлагаемый спосо управления позволяет повысить надежность фиксации, так как в цикл работы фиксатора вводят интервал снятия 1$ остаточных деформаций, причем в конц интервала снятия управляющего воздей ствия определяют знак его производной, а на интервале снятия остаточных деформаций подключают к обмотке
формации тензодатчика до Јд 6в , где 20 фиксаТоРа сигнал с датчика давления,
наблюдается максимальное усилие фиксации, минимальный сигнал ЭДС тензодатчика и где остаточные деформации полностью исчезают.
Устройство (фиг.6), реализующее способ управления, работает следующим образом.
По фронту запускающего импульса вырабатывается управляющее воздействие генератором 11 в виде единичного импульса или серии импульсов. Через ключ 13 и усилитель И мощности управляющее воздействие подается к обмоткам фиксатора 15. По срезу запускающего импульса V7 генератор снимает управляющее воздействие с обмотки фиксатора и по окончании свободного переходного затухающего процесса схемой 12 выделения вырабатывается сиграсположенного на фиксаторе, положительной или отрицательной полярности в прямой зависимости от знака производной и поддерживают максимум усили 25 фиксации до подачи импульса управляющего воздействия следующего цикла работы. Кроме того, способ управления позволяет повысить быстродействи включения фиксатора за счет того, чт направление подачи управляющего воздействия на обмотку фиксатора опреде ляют в прямой зависимости от знака производной, выделенной на предыдущем цикле работы фиксатора, так как при этом крутизна подъема магнито- механической характеристики больше (рабочая точка перемещается всегда либо по AD, либо по ВР (фиг.Зи ), а следовательно, больше крутизна
30
35
нал ( на подключение ключа 13 обмоток до подъема характеристики 9 (л 1/1), .
фиксатора 15 к датчику 1б давления. Кроме того, схема 12 выделения выделяет знак производной управляющего
г
воздействия о для определения направления подачи импульса управляющего воздействия в следующем цикле работы фиксатора, чтобы повысить быстродействие включения фиксатора, и для определения полярности прикладываемого напряжения с датчика давления, чтобы полностью исключить остаточные деформации. Усилитель 17 с дифференциальным входом усиливает сигнал ЭДС тензодатчика нужной полярности в зависимости от сигнала знака сГ для обеспечения максимального усилия фиксации. Если в результате подключения датчика давления его сигнал резко возрастает, то рабочая точка С магнитомеПредлагаемый способ управления наиболее целесообразно использовать в шаговых исполнительных устройствах где необходимо обеспечить высокую
45 точность перемещения нагрузки за счет надежного фиксирования, которое достигается введением интервала снятия управляющего воздействия и интер вала снятия остаточных напряжений
50 фиксатора.
Формула изобретения
55
1. Способ управления магнитострик ционным фиксатором, заключающийся в том, что подают импульс или высоко- частотный управляющий сигнал воздействия в течение интервала времени, достаточного для осуществления переханической характеристики перескочит точку А или В и начнет движение к точке D или Р. В результате этого зазор между кольцом 5 и стаканом 1 увеличится, деформация и ЭДС тензодатчика уменьшатся и рабочая точка магнито- механической характеристики вернется в точку А или В, исключая остаточные деформации.
Таким образом, предлагаемый способ управления позволяет повысить надежность фиксации, так как в цикл работы фиксатора вводят интервал снятия $ остаточных деформаций, причем в конце интервала снятия управляющего воздействия определяют знак его производной, а на интервале снятия остаточных деформаций подключают к обмотке
0
20 фиксаТоРа сигнал с датчика давления,
расположенного на фиксаторе, положительной или отрицательной полярности в прямой зависимости от знака производной и поддерживают максимум усилия фиксации до подачи импульса управляющего воздействия следующего цикла работы. Кроме того, способ управления позволяет повысить быстродействие включения фиксатора за счет того, что направление подачи управляющего воздействия на обмотку фиксатора определяют в прямой зависимости от знака производной, выделенной на предыдущем цикле работы фиксатора, так как при этом крутизна подъема магнито- механической характеристики больше (рабочая точка перемещается всегда либо по AD, либо по ВР (фиг.Зи ), а следовательно, больше крутизна
подъема характеристики 9 (л 1/1), .
Предлагаемый способ управления наиболее целесообразно использовать в шаговых исполнительных устройствах, где необходимо обеспечить высокую
точность перемещения нагрузки за счет надежного фиксирования, которое достигается введением интервала снятия управляющего воздействия и интервала снятия остаточных напряжений
фиксатора.
Формула изобретения
1. Способ управления магнитострик- ционным фиксатором, заключающийся в том, что подают импульс или высоко- частотный управляющий сигнал воздействия в течение интервала времени, достаточного для осуществления перемещения вала и последующего снятия управляющего воздействия, отличающийся тем, что, с целью повышения надежности фиксации и быстродействия включения фиксатора, в цикл работы фиксатора вводят интервал снятия остаточных деформаций, для этого определяют знак производной снимаемого управляющего воздействия в конце интервала снятия управляющего воздействия, затем подключают к обмотке фиксатора сигнал датчика давления, расположенного на фиксаторе, положительной или отрицательной полярности, которую определяют в прямой зависимости от знака производной, и поддерживают максимум усилия фиксации до подачи импульса управляющего воздействия следующего цикла работы.
2. Способ поп„1,отличаю- щ и и с я тем, что определяют направление подачи управляющего воздействия на обмотку фиксатора в прямой зависимости от знака производной, выделенного на предыдущем цикле работы фиксатора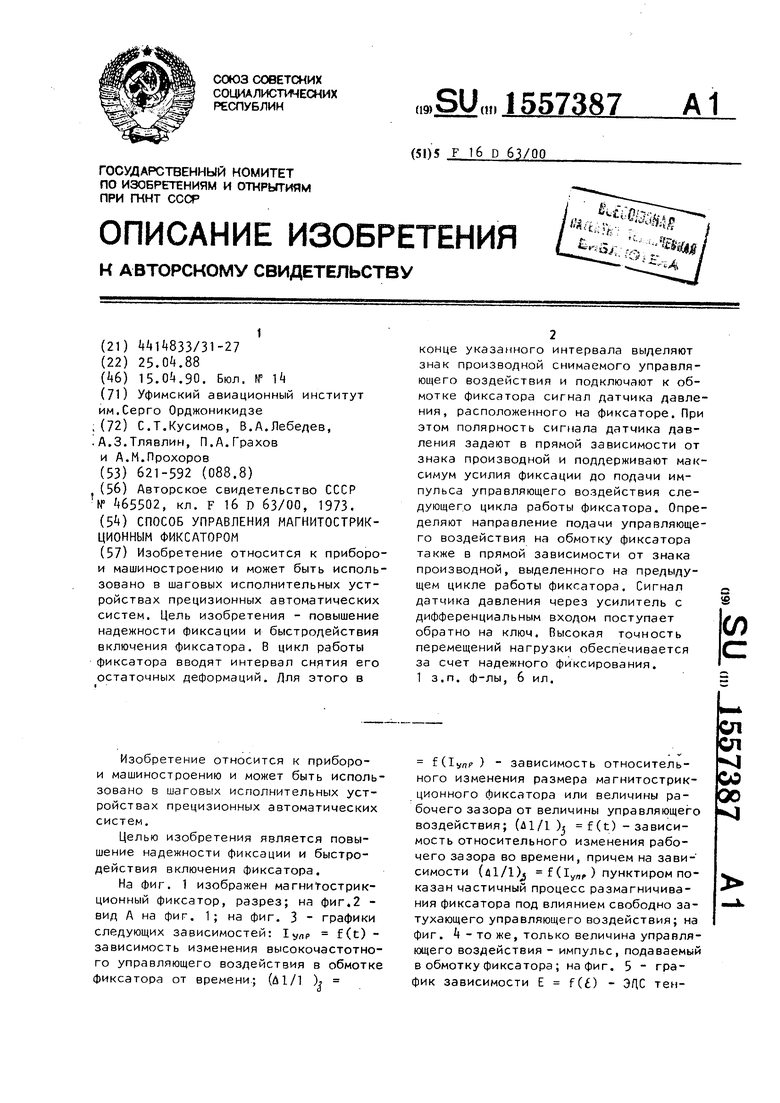


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления магнитострикционным шаговым исполнительным устройством | 1988 |
|
SU1616488A1 |
| Способ бесконтактного измерения электрического тока | 1985 |
|
SU1320852A1 |
| Способ управления однообмоточным двигателем колебательного движения | 1988 |
|
SU1601729A2 |
| Способ контроля физико-механических свойств ферромагнитных изделий и устройство для его осуществления | 1987 |
|
SU1642363A1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ ДИЗЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2370659C2 |
| СПОСОБ ПУСКА И САМОЗАПУСКА СИНХРОННОГО ДВИГАТЕЛЯ | 1992 |
|
RU2014720C1 |
| КОМПЛЕКС МНОГОКАНАЛЬНОЙ ЭКСПРЕСС ДИАГНОСТИКИ | 1997 |
|
RU2152073C1 |
| Способ управления магнитной опорой и устройство для его осуществления | 1987 |
|
SU1606770A1 |
| Способ определения фазы для шунтирования преобразовательного моста и устройство для осуществления способа | 1976 |
|
SU688074A1 |
| Способ регулирования синусоидального напряжения на нагрузке и устройство для его реализации | 2023 |
|
RU2804371C1 |

Изобретение относится к приборо- и машиностроению и, в частности, может быть использовано в шаговых исполнительных устройствах прецизионных автоматических систем. Цель изобретения - повышение надежности фиксации и быстродействия включения фиксатора. В цикл работы фиксатора вводят интервал снятия его остаточных деформаций. Для этого в конце указанного интервала выделяют знак производной снимаемого управляющего воздействия и подключают к обмотке фиксатора сигнал датчика давления, расположенного на фиксаторе. При этом полярность сигнала датчика давления задают в прямой зависимости от знака производной и поддерживают максимум усилия фиксации до подачи импульса управляющего воздействия следующего цикла работы фиксатора. Определяют направление подачи управляющего воздействия на обмотку фиксатора также в прямой зависимости от знака производной, выделенного на предыдущем цикле работы фиксатора. Сигнал датчика давления через усилитель с дифференциальным входом поступает обратно на ключ. Высокая точность перемещений нагрузки обеспечивается за счет надежного фиксирования. 1 з.п. ф-лы, 6 ил.
V///A
Фие.1
ВидА
Фиг. I
155738/ fitt/tk tit/fa
frl/th p fa/fa
tf ff(}f fstt t,tltt
ФигЗ
tf tg tit tt tt h
Составитель В.Пучинский Редактор А.Лежнина Техред л.Олийнык .
Заказ 709
Тираж 530
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНГ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина, 101
фиг. 6
Корректор Э.Лончакова
Подписное
| Тормозное устройство | 1973 |
|
SU465502A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
