/S/ // /// // // S////// S/S /// /// /s/ /// S/S/// ///
Фиг. 5
Изобретение относится к грузозахватным устройствам, использующим вакуум для захвата и удержания груза при его подъеме и транспортировке, и может применяться для выполнения различных работ на суше и под водой.
Цель изобретения - повышение надежности работы.
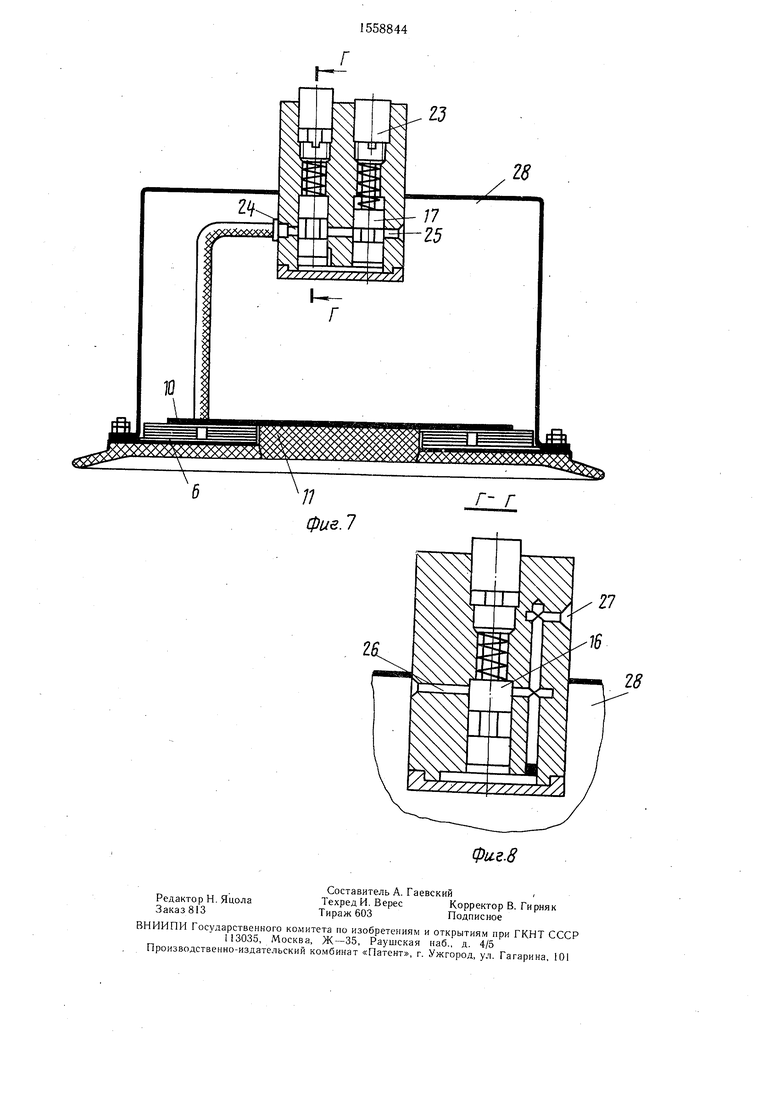
На фиг. 1 изображен вакуумный захват с эластичной вакуумобразующей камерой, общий вид; на фиг. 2 - золотниковое распределительное устройство управления, общий вид; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - вакуумный захват в режиме удержания груза, общий вид; на фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - вакуумный захват в режиме отпускания груза, общий вид; на фиг. 8 - разрез Г-Г на фиг. 7.
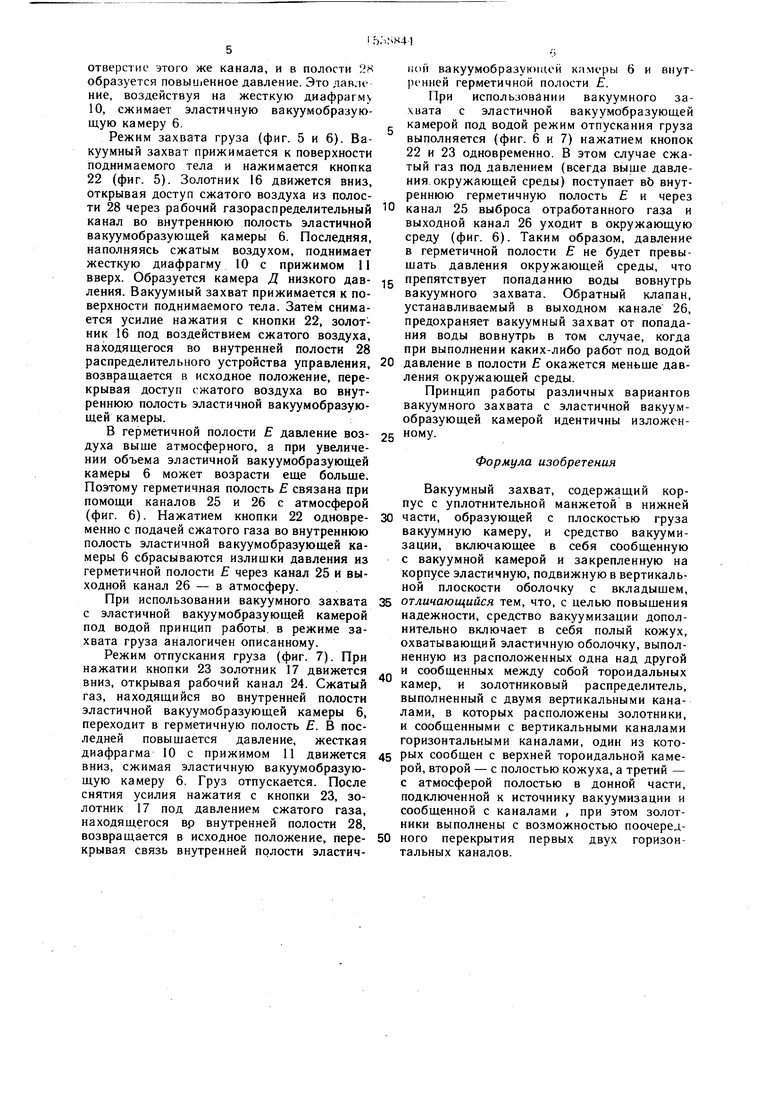
Вакуумный захват с эластичной вакуум- образующей камерой (фиг. 1) состоит из трех частей, соединенных герметично между гобой. Первая часть включает камеру 1, содержащую внешний уплотнительный элемент, который в зависимости от требований, предъявляемых к захвату, может быть самой различной конструкции, например тарельчатой. По краям внешней части вакуумобразующей камеры 1 устанавливаются винтовые присоединительные штыри 2.
Вторая часть состоит из поддона 3, пред- ;г яюшего собой жесткую пластину с вы- ; ,; центре, обклеенную со всех сторон , с рметизирующим материалом, по краям iuгорой установлены винтовые присоеди- .ительные штыри 4 и имеются присоединительные отверстия 5. На поддон 3 герметично прикреплена эластичная ва- куумобразующая камера 6, представляющая собой трубчатую цилиндрическую конструкцию, составленную из тороидальных камер 7, герметично соединенных по торцу, внутренние полости тороидальных камер 7 соединены между собой отверстиями 8 и при помощи гибкого шланга 9 подсоединены к системе сжатого газа. Со стороны подсоединения шланга 9 на торцовую поверхность трубчатой цилиндрической конструкции герметично прикрепляется жесткая диафрагма 10 с прижимом 11.
Часть третья состоит из кожуха 12 и распределительного устройства 13 управления, которое при помощи гибкого шланга 9 соединено с эластичной вакуумобразующей камерой 6. Распределительное устройство 13 управления в зависимости от требований, предъявляемых к вакуумному захвату может быть самой разнообразной конструкции, например в виде сдвоенного золотникового устройства (фиг. 2-4).
Сдвоенное золотниковое устройство (фиг. 2) состоит из корпуса 14, нижняя часть которого герметично перекрыта донной крышкой 15. В корпусе 14 установлены золотниковые устройства, содержащие золотники 16 и 17 с регулировочными втулками 18 и 19 и отжимными пружинами 20 и 21. На золотниковые устройства навинчены кнопки 22 и 23 или же на их место
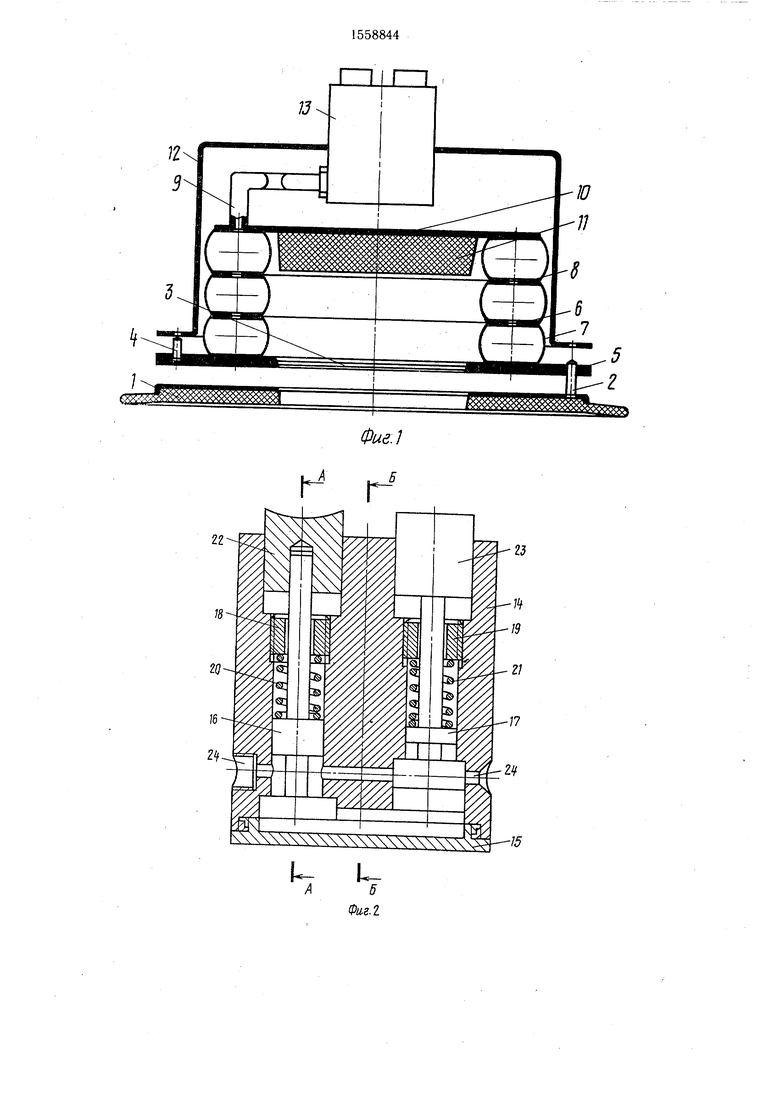
могут быть установлены электромагнитные нажимные устройства. Золотники 16 и 17 представляют собой валы с утолщениями, которыми они перекрывают рабочий газораспределительный канал 24. На фиг. 3 показано выполнение каналов 25 и 26 выброса отработанного газа в атмосферу. На фиг. 4 показано выполнение канала 27 подачи сжатого газа от внешнего источника во внутреннюю полость 28 сдвоенного золотникового устройства.
При использовании вакуумного захвата под водой конструктивное исполнение сдвоенного золотникового устройства от описанного отличается тем, что выпускное отверстие канала 26 выброса отработанного газа перекрыто обратным клапаном
0 (не показано). На базе предлагаемой конструкции можно изготовить секционный вакуумный захват любой заданной грузоподъемности. Секционные вакуумные захваты могут быть двух типов: жесткий секци5 онный вакуумный захват, гибкий секционный вакуумный захват.
Жесткий секционный вакуумный захват представляет собой групповой вакуумный захват, в едином герметичном корпусе которого, разделенном на секции, изолиро0 ванные друг от друга, работает целая группа эластичных вакуумобразующих камер, управляемых одним распределительным устройством управления (не показано). Гибкий секционный вакуумный захват предствляет собой групповой вакуум5 ный захват, элементами которого являются вакуумные захваты с эластичной вакуум- образующей камерой без распределительного устройства управления. Элементы вакуумного захвата устанавливаются на неQ котором расстоянии друг от друга на основании, позволяющем им смещаться относительно друг друга или элементы вакуумного захвата крепятся за корпус при помощи шарниров друг к другу. Управление элементами вакуумного захвата осущест5 вляется одним распределительным устройством управления, связанным с ними гибкими шлангами (не показаны).
Вакуумный захват с эластичной вакуумобразующей камерой работает следующим образом.
0 Канал 27 подсоединяется к источнику сжатого воздуха, который, попав во внутреннюю полость 28 сдвоенного золотникового устройства, поднимает золотники 16 и 17 в крайнее верхнее положение. При этом золотник 16 перекрывает доступ сжатого воздуха во внутренней полости 28 сдвоенного золотникового устройства в рабочий газораспределительный канал 24 раньше, чем золотник 17 перекрывает выходное
5
отверстие этого же канала, и в полости 2г образуется повышенное давление. Это давание, воздействуя на жесткую диафрагмч 10, сжимает эластичную вакуумобразую- щую камеру 6.
Режим захвата груза (фиг. 5 и 6). Вакуумный захват прижимается к поверхности поднимаемого тела и нажимается кнопка 22 (фиг. 5). Золотник 16 движется вниз, открывая доступ сжатого воздуха из полости 28 через рабочий газораспределительный канал во внутреннюю полость эластичной вакуумобразующей камеры 6. Последняя, наполняясь сжатым воздухом, поднимает жесткую диафрагму 10 с прижимом И вверх. Образуется камера Д низкого давления. Вакуумный захват прижимается к поверхности поднимаемого тела. Затем снимается усилие нажатия с кнопки 22, золотник 16 под воздействием сжатого воздуха, находящегося во внутренней полости 28 распределительного устройства управления, возвращается в исходное положение, перекрывая доступ сжатого воздуха во внутреннюю полость эластичной вакуумобразующей камеры.
В герметичной полости Ј давление воздуха выше атмосферного, а при увеличении объема эластичной вакуумобразующей камеры 6 может возрасти еще больше. Поэтому герметичная полость Ј связана при помощи каналов 25 и 26 с атмосферой (фиг. 6). Нажатием кнопки 22 одновременно с подачей сжатого газа во внутреннюю полость эластичной вакуумобразующей камеры 6 сбрасываются излишки давления из герметичной полости Ј через канал 25 и выходной канал 26 - в атмосферу.
При использовании вакуумного захвата с эластичной вакуумобразующей камерой под водой принцип работы в режиме захвата груза аналогичен описанному.
Режим отпускания груза (фиг. 7). При нажатии кнопки 23 золотник 17 движется вниз, открывая рабочий канал 24. Сжатый газ, находящийся во внутренней полости эластичной вакуумобразующей камеры 6, переходит в герметичную полость Ј. В последней повышается давление, жесткая диафрагма 10 с прижимом 11 движется вниз, сжимая эластичную вакуумобразую- щую камеру 6. Груз отпускается. После снятия усилия нажатия с кнопки 23, золотник 17 под давлением сжатого газа, находящегося вр внутренней полости 28, возвращается в исходное положение, перекрывая связь внутренней полости эластичной вакуумобразующеи камеры 6 и внутренней герметичной полости Ј.
При использовании вакуумного захвата с эластичной вакуумобразующей камерой под водой режим отпускания груза выполняется (фиг. 6 и 7) нажатием кнопок 22 и 23 одновременно. В этом случае сжатый газ под давлением (всегда выше давления окружающей среды) поступает во внутреннюю герметичную полость Ј и через
0 канал 25 выброса отработанного газа и выходной канал 26 уходит в окружающую среду (фиг. 6). Таким образом, давление в герметичной полости Ј не будет превышать давления окружающей среды, что
5 препятствует попаданию воды вовнутрь вакуумного захвата. Обратный клапан, устанавливаемый в выходном канале 26, предохраняет вакуумный захват от попадания воды вовнутрь в том случае, когда при выполнении каких-либо работ под водой
0 давление в полости Ј окажется меньше давления окружающей среды.
Принцип работы различных вариантов вакуумного захвата с эластичной вакуум- образующей камерой идентичны изложен5 НОМУФормула изобретения
Вакуумный захват, содержащий корпус с уплотнительной манжетой в нижней
0 части, образующей с плоскостью груза вакуумную камеру, и средство вакууми- зации, включающее в себя сообщенную с вакуумной камерой и закрепленную на корпусе эластичную, подвижную в вертикальной плоскости оболочку с вкладышем,
5 отличающийся тем, что, с целью повышения надежности, средство вакуумизации дополнительно включает в себя полый кожух, охватывающий эластичную оболочку, выполненную из расположенных одна над другой и сообщенных между собой тороидальных камер, и золотниковый распределитель, выполненный с двумя вертикальными каналами, в которых расположены золотники, и сообщенными с вертикальными каналами горизонтальными каналами, один из кото5 рых сообщен с верхней тороидальной камерой, второй - с полостью кожуха, а третий - с атмосферой полостью в донной части, подключенной к источнику вакуумизации и сообщенной с каналами , при этом золотники выполнены с возможностью поочеред0 кого перекрытия первых двух горизонтальных каналов.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1984 |
|
SU1379223A1 |
| Вакуумный захват | 1985 |
|
SU1382799A1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320902C2 |
| Вакуумное грузозахватное устройство | 1984 |
|
SU1199734A1 |
| ПОРШНЕВАЯ МАШИНА (ВАРИАНТЫ) | 2000 |
|
RU2215879C2 |
| Обратный наборно-секционный клапан системы управления шаровым краном | 2020 |
|
RU2737570C1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320903C1 |
| Клапан и узел управления, применяемый в нем | 2016 |
|
RU2631844C1 |
| Устройство для абразивной обработки | 1981 |
|
SU986744A1 |
| Клапан | 2016 |
|
RU2634165C1 |
Изобретение относится к грузозахватным устройствам и может применяться для выполнения различных работ на суше и под водой. Цель изобретения - повышение надежности. Захват содержит смонтированные на кожухе 12 камеру 1, соединенную с полостью вакуумообразующей камеры 6, составленную из тороидальных камер 7, и золотниковое распределительное устройство 13, каналы которого соединены с источником сжатого воздуха, атмосферой и полостью камер 7. При подаче воздуха в полость камер 7 или в полость кожуха 12 происходит раздвижение или сжатие тороидальных камер 7, вызывающее создание или ликвидацию разряжения в полости камеры 1. 8 ил.
h
Фие.1
23
u
5 Фиг. 2
в- в
Фиг. 6
28
филЛ
26
28
| Вакуум-присос | 1978 |
|
SU779244A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
