;о со со .
Изобретение относится к грузозахватным устройствам, предназначенны для перемещения плоских изделий.
Цель изобретения - повышение грузоподъемности.
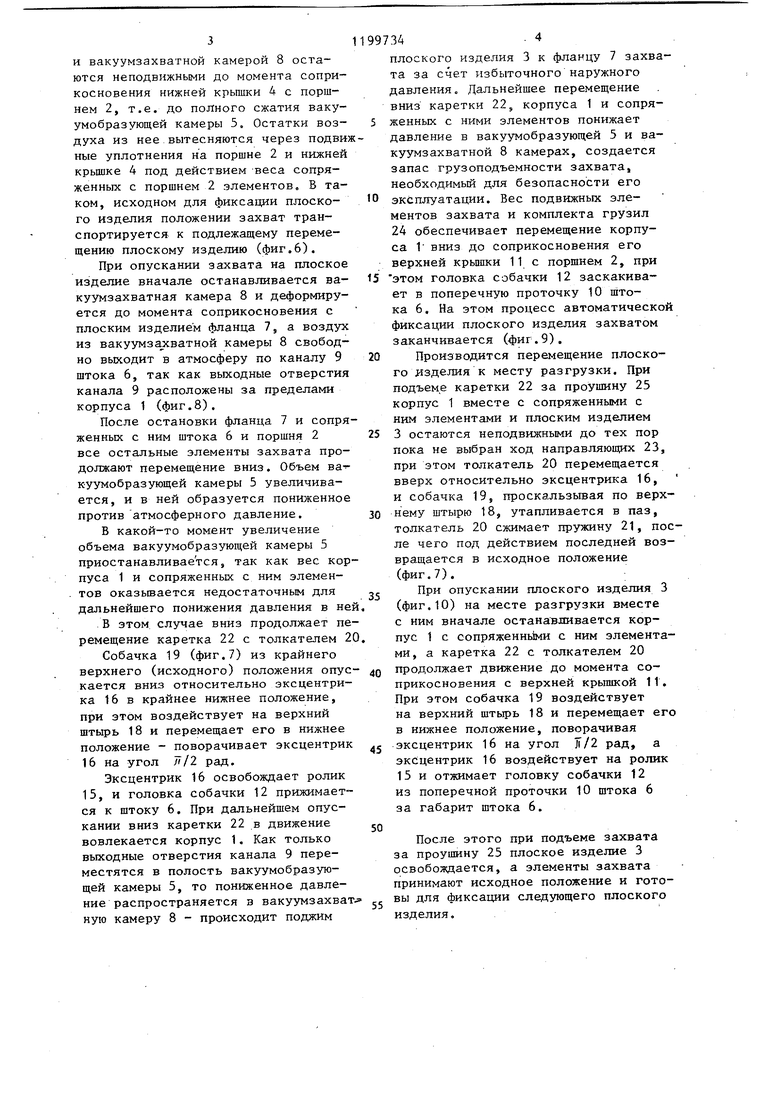
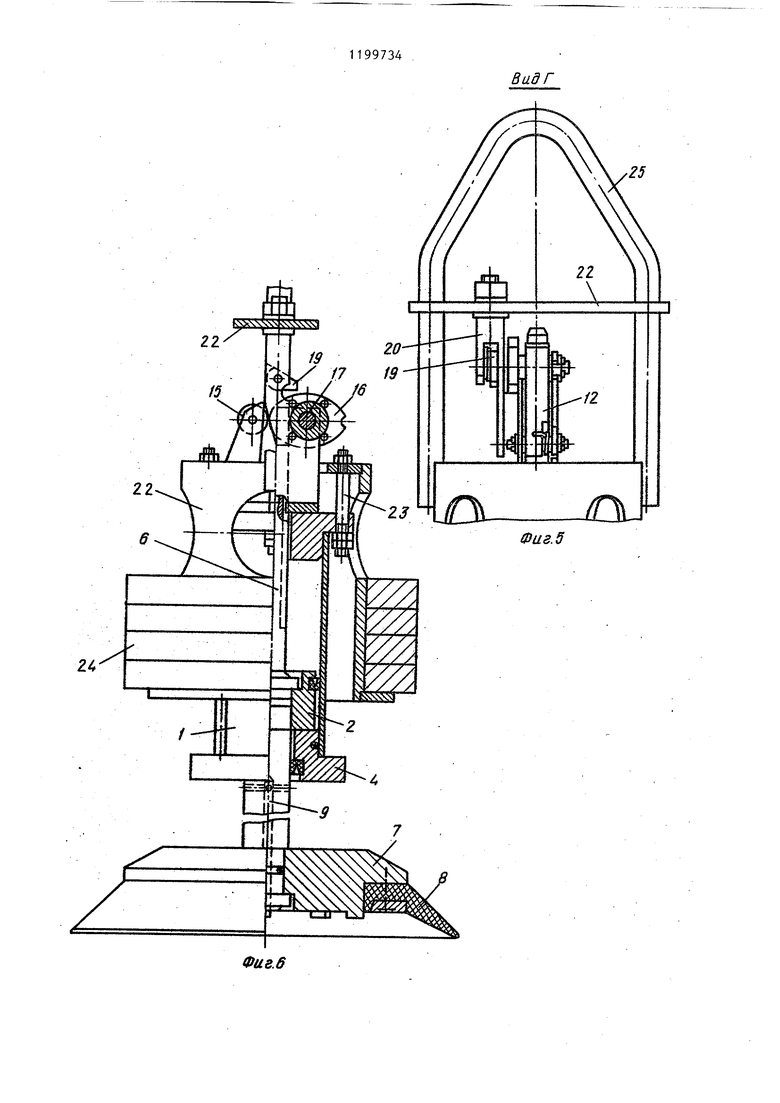
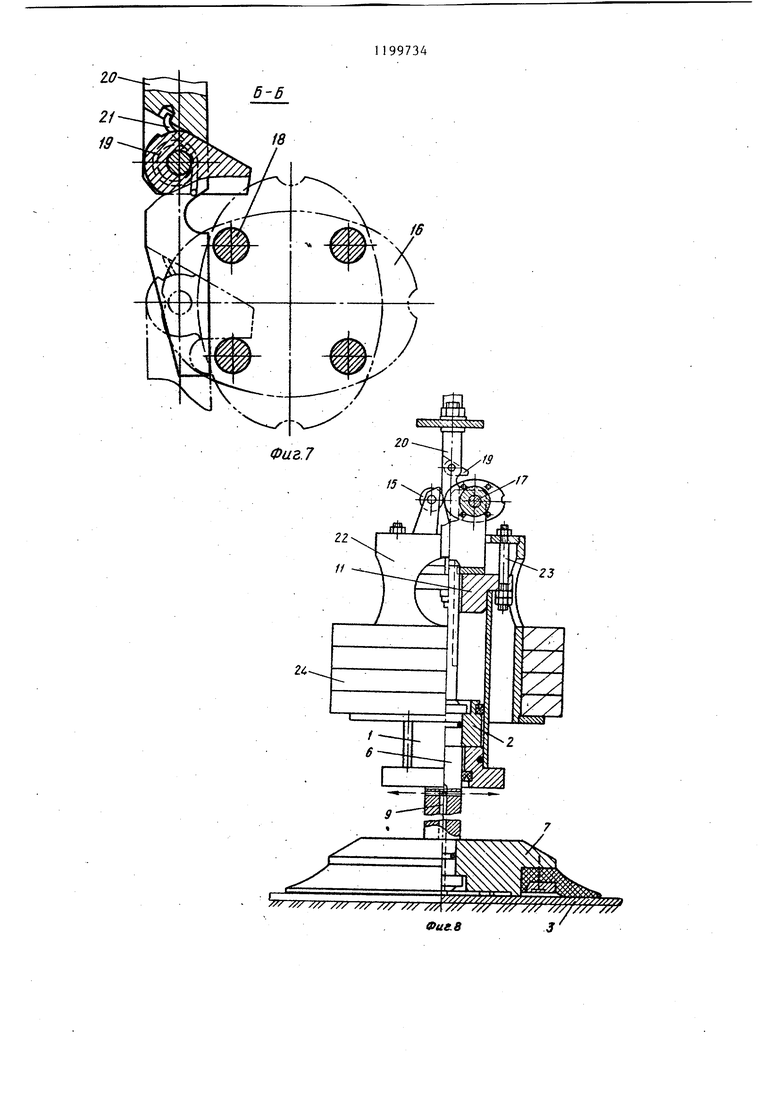
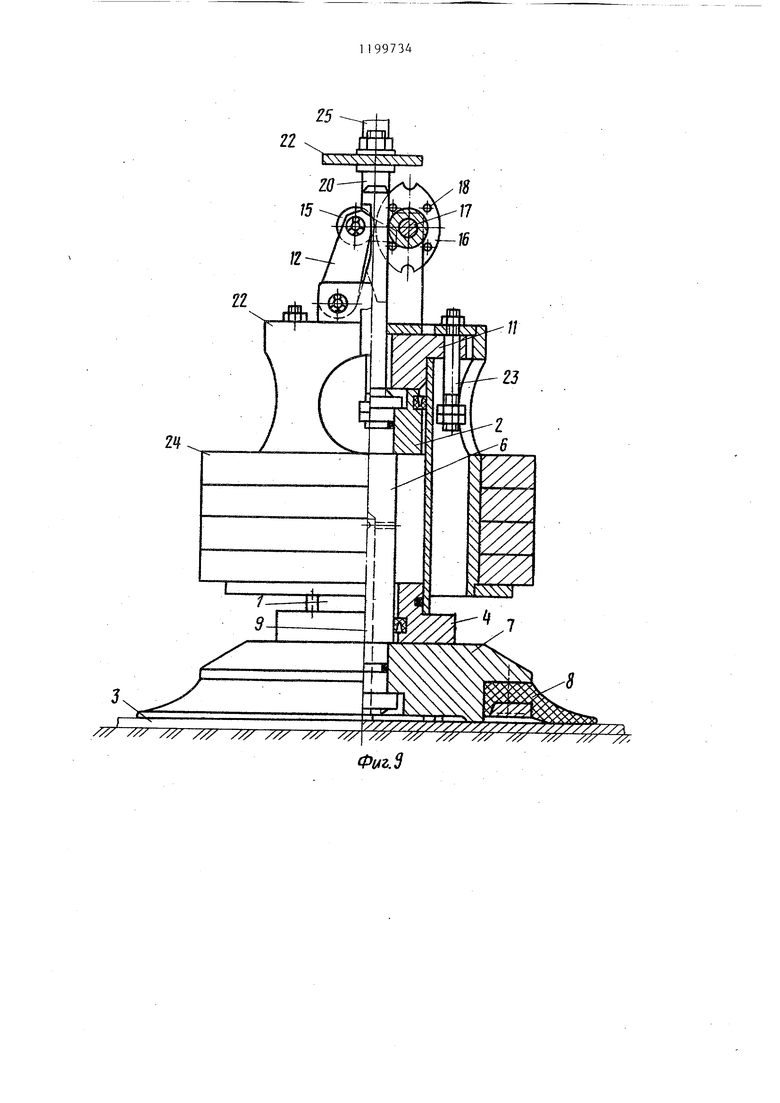
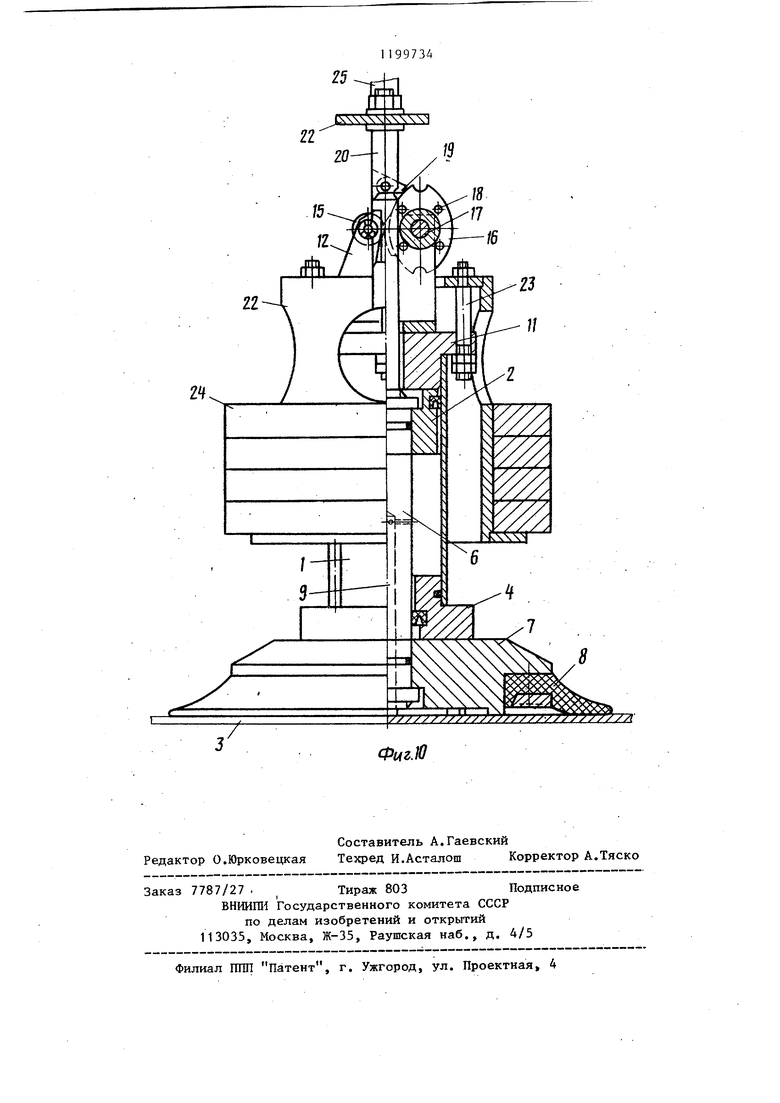
На фиг.1 изображено вакуумное устройство в исходном положении (в момент последующего освобождения плоского изделия на месте разгрузки общий ВИД , на фиг.2 - разрез А-А на фиг.1 на фиг.З - разрез Б-Б на фиг.2- на фиг.4 - разрез В-В на фиг.1; на фиг.З - вид Г на фиг.1; н гЬиг.б - устройство перед опусканием на плоское изделие для его фиксации общий ВИД; на фиг.7 - разрез Б-Б на фиг.2 (перед опусканием на плоское изделие для его фиксации или совмесным опусканием с плоским изделием на месте разгрузки для его освобождения); на фиг.8 - устройство при опускании на плоское изделие для его фиксации; на фиг.9 - то же, после окончания фиксации плоского изделия, общий вид-, на фиг. 10 - то же, в момент перемещения плоского изделия, общий вид.
Вакуумное грузозахватное устройство включает в себя корпус 1, поршень 2 и злементы автоматизации процессов попеременной фиксации и
освобождения плоского изделия 3. I
Между нижней крышкой 4 корпуса 1 и поршнем 2 размещена вакуумобразующая камера 5.
На поршне 2 смонтирован шток 6, на нижнем конце которого установлен фланец 7 с эластичной вакуумзахватной камерой 8, соединенной с вакуумобразующей 5 камерой каналом 9, вьтолненным в штоке 6 с выходом на его поверхность на расстоянии от поршня, превышающем высоту нижней крышки 4. На верхнем конце штока 6 выполнена поперечная проточка 10 с возможностью контактирования с ней в момент расположения поршня в крайнем верхнем относительно корпуса 1 положении (вплотную к верхней крьш1ке 11 корпуса 1) головки собачки 12, смонтированной на верхней крьшгке 11 с возможностью принудительного поворота на оси 13 под действием пружины 14 в сторону штока .6. На боковой поверхности головки собачки 12 закреплен ролик 15 с возможностью взаимодействия с эксцентриком 16, шарнирно зйкрепленным
342
посредством оси 17 на верхней крышке 11. На боковой поверхности эксцентрика 16 жестко закреплены по окружности штыри 18, при взаимодействии
с которыми собачки 19, смонтированной на толкателе 20 и выведенной в исходное положение пружиной 21, обеспечивается поворот эксцентрика 16 на угол J/2 рад,
Толкатель 20 закреплен на каретке 22, имеющей возможность ограниченного перемещения относительно корпуса 1 посредством направляющих 23.
Каретка 22 снабжена комплектом грузил 24 и имеет проушину 25 для подвески на раме грузозахватного устройства или крюке грузоподъемного механизма.
Устройство работает следующим образом.
В исходном положении (в момент последующего освобождения плоского изделия на месте разгрузки, фиг.1)
поршень 2 расположен в крайнем верхнем относительно корпуса 1 положении вплотную к верхней крышке 11, а каретка 22 - в крайнем нижнем положении, также вплотную к верхней
крьш1ке 11. Головка собачки 12 посредством контактирующего воздействия эксцентрика 16 на ролик 15 выдвинута из поперечной проточки 10 штока 6 за габарит штока 6 и не
может препятствовать перемещению штока 6 с Поршнем 2 вниз относительно корпуса 1. Собачка 19 толкателя 20 (фиг.З) размещена между верхним и нижним штырями 18.
При транспортировании захвата к подлежащему перемещению плоскому изделию за проушину 25 вверх одновременно с ней начинают перемещаться каретка 22 и толкатель 20, а собачка
19, проскальзывая по верхнему штьфю 18, утапливается в паз толкателя 20, сжимая пружину 21, после чего под действием последней возвращается в исходное положение (фиг.7). Эксцентрик 16 при этом не поворачивается в направлении по часовой стрелке, так как зафиксирован роликом 15 в выточке на вершине криволинейной поверхности.
После этого, вместе с кареткой 22 вверх начинает перемещаться корпус 1, подхваченньй направляющими 23. Поршень 2 со штоком 6, фланцем 7 3 и вакуумзахватной камерой 8 остаются неподвижными до момента соприкосновения нижней крьшки 4 с поршнем 2, т.е. до полного сжатия вакуумобразующей камеры 5. Остатки воздуха из нее вытесняются через подви ные уплотнения на поршне 2 и нижней крьшке 4 под действием веса сопряженных с поршнем 2 элементов, В таком, исходном для фиксации плоского изделия положении захват транспортируется- к подлежащему перемещению плоскому изделию (фиг,6). При опускании захвата на плоское изделие вначале останавливается вакуумзахватная камера 8 и деформируется до момента соприкосновения с плоским изделием фланца 7, а воздух из вакуумза;хватной камеры 8 свободно вькодит в атмосферу по каналу 9 штока 6, так как выходные отверстия канала 9 расположены за пределами корпуса 1 (фиг.8). После остановки фланца 7 и сопря женных с ним штока 6 и поршня 2 все остальные элементы захвата продолжают перемещение вниз. Объем вакуумобразующей камеры 5 увеличивается, и в ней образуется пониженное против атмосферного давление. В какой-то момент увеличение объема вакуумобразующей камеры 5 приостанавливается, так как вес кор пуса 1 и сопряженных с ним элементов оказывается недостаточным для дальнейшего понижения давления в не В этом случае вниз продолжает пе ремещение каретка 22 с толкателем 2 Собачка 19 (фиг.7) из крайнего верхнего (исходного) положения опус кается вниз относительно эксцентрика 16 в крайнее нижнее положение, при этом воздействует на верхний штырь 1В и перемещает его в нижнее положение - поворачивает эксцентрик 16 на угол Л/2 рад. Эксцентрик 16 освобождает ролик 15, и головка собачки 12 прижимается к штоку 6. При дальнейшем опускании вниз каретки 22 в движение вовлекается корпус 1. Как только выходные отверстия канала 9 переместятся в полость вакуумобразующей камеры 5, то пониженное давление распространяется в вакуумзахват ную камеру 8 - происходит поджим 34. 4 плоского изделия 3 к фланцу 7 захвата за счет избыточного наружного давления. Дальнейшее перемещение вниз каретки 22, корпуса 1 и сопряженных с ними элементов понижает давление в вакуумобразующей 5 и вакуумзахватной 8 камерах, создается запас грузоподъемности захвата, необходимый для безопасности его эксплуатации. Вес подвижных элементов захвата и комплекта грузил 24 обеспечивает перемещение корпуса 1 вниз до соприкосновения его верхней крьппки 11 с поршнем 2, при этом головка собачки 12 заскакивает в поперечную проточку 10 Щтока 6. На этом процесс автоматической фиксации плоского изделия захватом заканчивается (фиг.9), Производится перемещение плоского лзделия к месту разгрузки. При подъеме каретки 22 за проушину 25 корпус 1 вместе с сопряженными с ним элементами и плоским изделием 3 остаются неподвижными до тех пор пока не выбран ход направляющих 23, при этом толкатель 20 перемещается вверх относительно эксцентрика 16, и собачка 19, проскальзывая по верхнему штырю 18, утапливается в паз, толкатель 20 сжимает пружину 21, после чего под действием последней возвращается в исходное положение (фиг.7). При опускании плоского изделия 3 (фиг.10) на месте разгрузки вместе с ним вначале останавливается корпус 1 с сопряженными с ним элементами, а каретка 22 с толкателем 20 продолжает движение до момента соприкосновения с верхней крышкой 11, При этом собачка 19 воздействует на верхний штырь 18 и перемещает его в нижнее положение, поворачивая эксцентрик 16 на угол 1/2 рад, а эксцентрик 16 воздействует на ролик 15 и отжимает головку собачки 12 из поперечной проточки 10 штока 6 за габарит штока 6. После этого при подъеме захвата за проушину 25 плоское изделие 3 свобождается, а элементы захвата ринимают исходное положение и готоы для фиксации следующего плоского изделия, /// /// /// ////// /// /7/ /// /// Фа&.1 /// /// /// /// /// ///
Фив.2
Фаг.
Фиа.6
В ид Г /У/ ///f /// /// /// //Х /// /// /// //7 // /// /// /7 /// //
Фиг, /У/ х / /7 /// /у.
Фиг.)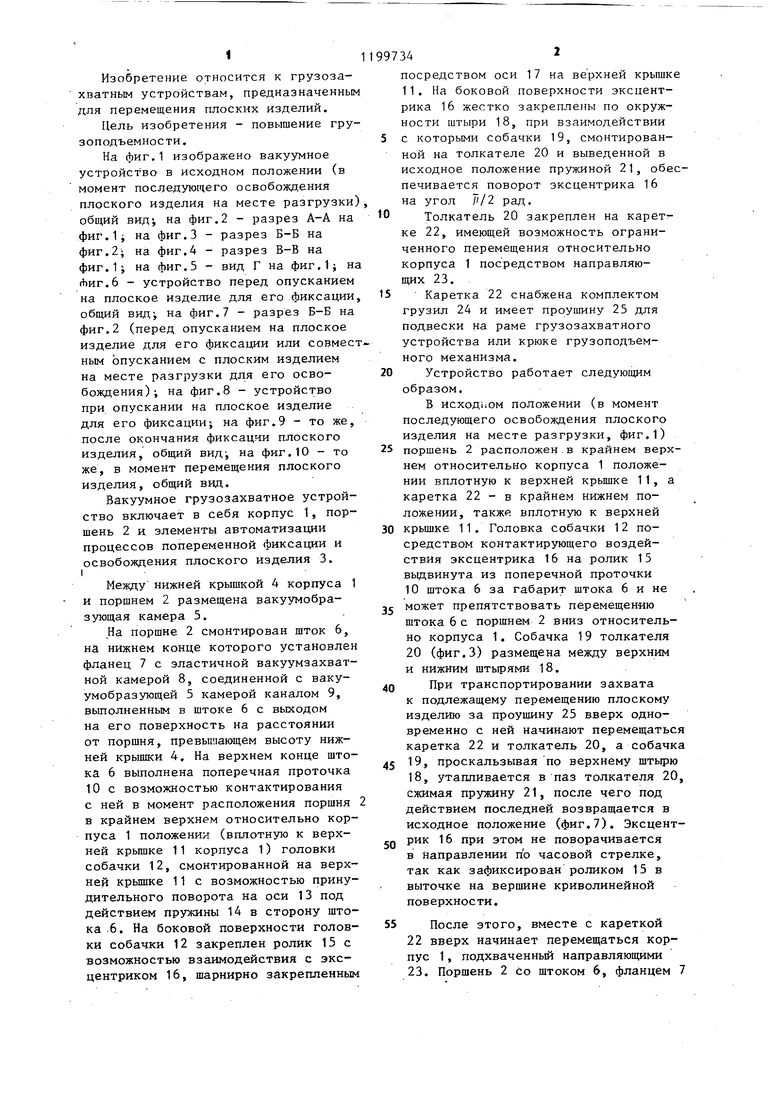
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| Вакуумное грузозахватное устройство | 1979 |
|
SU931646A1 |
| Вакуумное грузозахватное устройство | 1980 |
|
SU906888A1 |
| Вакуумный захват | 1982 |
|
SU1070112A1 |
| Вакуумный захват | 1984 |
|
SU1152910A2 |
| Вакуумный безнасосный захват | 1980 |
|
SU935427A1 |
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ ОБУВИ | 1969 |
|
SU244912A1 |
| Устройство для маркировки изделий | 1984 |
|
SU1348221A1 |
| Грузозахватное устройство | 1986 |
|
SU1368251A1 |
BAKYYlffiOE ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус с цитлиндром, вакуумобразующий поршень со штоком, механизм переключения ходов поршня и вакуумную захватную камеру, отличающееся тем. что, с целью повьшенйя грузоподъемности, на верхней части корпуса подвижно установлена каретка с грузом, поршень смонтирован в средней части штока, нижний конец которого вьшолнен с каналами и соединен с вакуумной захватной камерой, а верхний имеет продольный паз, при этом на каретке установлен подпружиненный толкатель, а механизм переключения ходов порщня включает в себя подпружиненную собачку и поворотный эксцентрик со штырями, смонтированные в верхней части корпуса с возможностью захода в паз штока и взаимодействия с толкателем и собачкой соответственно.
| Авторское свидетельство СССР № | |||
| Вакуумное грузозахватное устройство | 1979 |
|
SU931646A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
