(Л
со со ISD со
И:1обретение относится к г)у о:(ахват- иым устройствам и iipe;uia:tna4eno для выполнения транспортных и IKH ру.ючно-ра: - грузочны.х работ иа суше и под водой.
Цель и;«)бретенияпоЕ ышение удобства в эксплуатации.
На фиг . 1 изображено ycтpoйcтE o и Н аимное расположение :, 1ементов )акуумп()- го :и1хвата в н жиме удержания па ((ini. 2:и).,1отников()е управляющее устройство. )аз)сн; па фщ-. 3 pa:ipe:i Л .Л на фиг. 2; на фи. 4 ра.чрез Б Б на фиг. 2: па (()Я . Г) устройство и блок-схема упраи- ляк)1ис() секциоппо1 о вакуу 1П(Л о захвата; па (j))ir. Н в.ишмпос распо. южепие и со- С юяпие :1,1С К Нто isaKyyvnoro .захвата в режиме отнускания rpy:ia.
Вакуумп1 1Й захват состоит из трех пера (борных qacTeii. сое.чиненных между собой (фи1. I), полого корпуса I и установленного па нем зо.ютниковогч) уг1равляк)|це1 о устройства 2, акуумообразующсй Kaviepi i. состоящей из поддона 3 с закрен.лепп)й иа пем . 1астичной трубчатой конструкции 4, перекрытой све1)ху жесгкой диафрагмой 5 с вк,1адын1ем t закреп. К Ипой сЕН рху на .uia- ij)j )arMe Г) мегаллической пластины (i, и BHCIH- ней унлот)111те. 1ьной манжегы 7.
Вак умобразующая ка мера BCI авляется в 11ол)|й корпус 1, ПОДВОДЯ1НИМ шлангом 8 н (ПВОДЯН1ИМ 1нлангом 9 подсоединяется к .и). 1отник()вому у11)ав. 1як)1нему устройству 2 и при номоши ви)1тов 1 О .закреп.1Я(тся па кожухе 1, ()б)азуя нолость 11. К полученной конст)укнпн нрп помощи iuiHTOB 12 к)епится внешняя упло1 пителы1ая манжета 7.
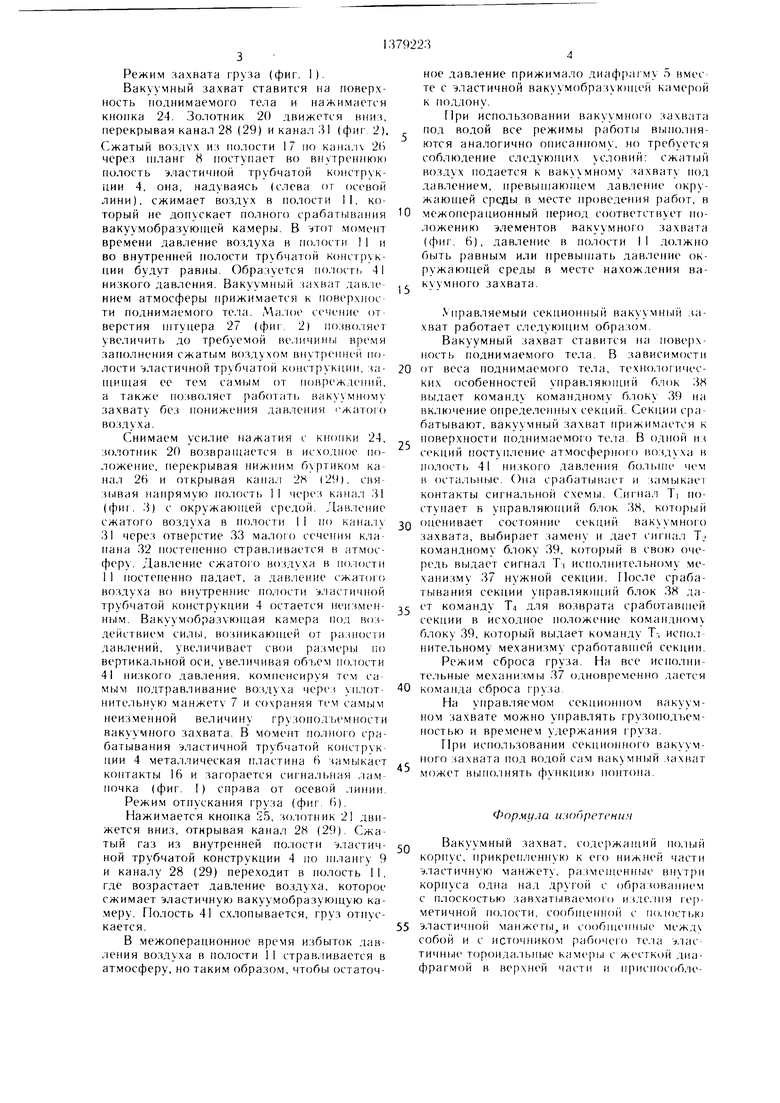
. -Jo. ioTiiMKOBoe у п) а в;: я К) шее устройство i(. 2 4) состоит из корпуса 13 и донпой к 1ышки 14 и к епится на ко|)иусе I таким образом,чтобы нижняя часть его находплась н но. юсги II. На донной к)ышке 14 .закреплена дн лек1 |)пческая н.частина 15 с контактами Iti, KoropiiK подсоединяются к схеме сигнализапии или в зависимости от исполнения к мик|1опро 1ессорп()му управляющему б. юку.
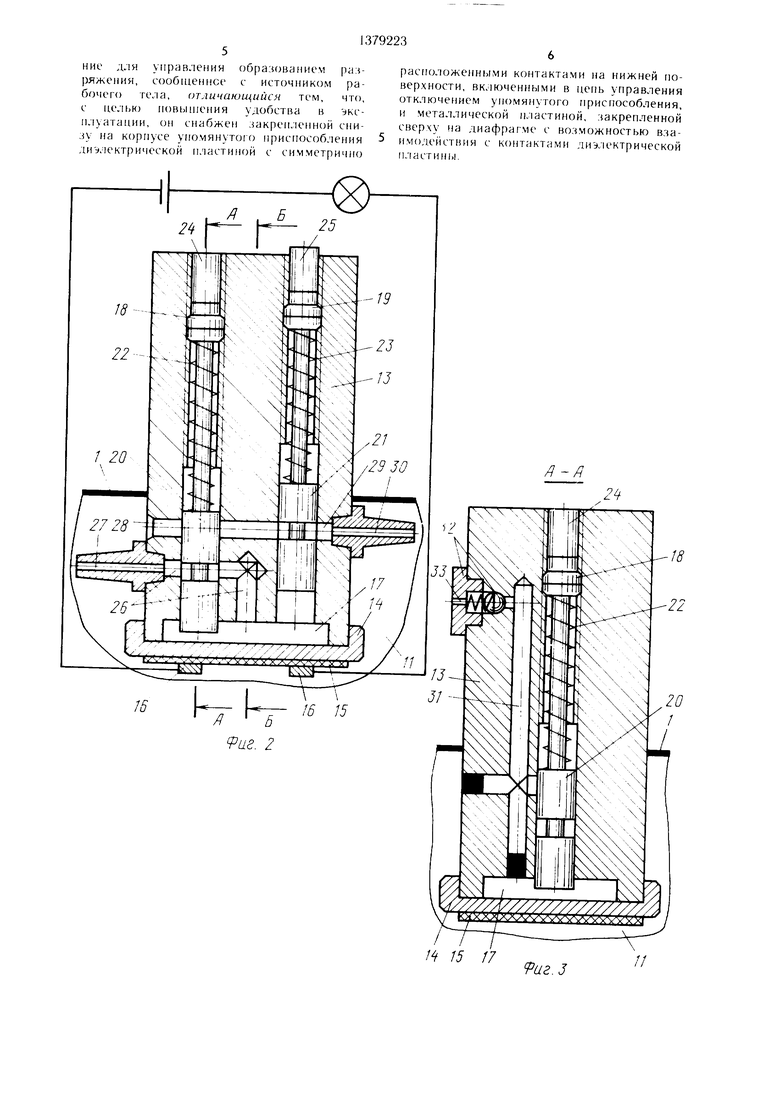
В К(.)рпусе 13 имеется два сквозных иа- ра.|;1ельпых ст пенча 1ы Kana:ia, в верхней меньшей по дпаметру части которых паре- запа резьба, (дш.п капа.п, заканчиваются вьк мкой. образующей (. овместно с донной крьппкой 14 полость 17. В нараллельпые капа.чы ввинчень резьбовые регулиров{) вту.тки 1« и 19 н вставлены золотники 20 и 21 соответственно с отжимными пружинами 22 и 23. и удерживаются там дойной крьпнкой 14. На штоки зо.тогпиков 20 и 21 соответственно навинчиваются нажим шле кнопки 24 и 2Г). Яз ио/юсги 17 через io- логник 20 iipo.xo.uiT подводящий капа.т 2t) (фиг. 2), к которому подсоединяется штуцер 27. Нос.тедний (((пи. 1) подсоединяется к зо.тотниковому управляющему устройст- , п()дводян1И11 шланг 8 и сечение его от- версгия он)еде.1яег время срабат1 1вания вакуу.мобразуюшей камеры. Выше над каналом 2fi расположен канал 28 (29) сброса сжато- к) воздуха из внутренней полости эластичной трубчатой конструкции 4, проходящей через зо. ютник 20 (21), с одной стороны к каналу 28 (29) кренится 1нтуцер 30, подсоединяющий через шланг 9 : ластичпую ва- куумобра.зуюшую камеру к полости 11. С каналом 28 |29) (фиг. ,3) че)ез золотник 20 связан канал 31 выброса отработанного О га.за в атмосферу, который заканчивается предохранительным клапано.м 32. Выходное отверстие 33 кланана 32 выполнено по сечению значительно меньше сечения канала 31, через канал 28 (29) канал 31 связан с по- .юстью 11. Вместо клапана 32 может усганов.,тен регу,жируемый дроссель. Полост) 17 при помош) капа.та 34 подвода сжатого воздуха подсое.чиняетч я к источнику сжатого воздуха (фиг. 4 ).
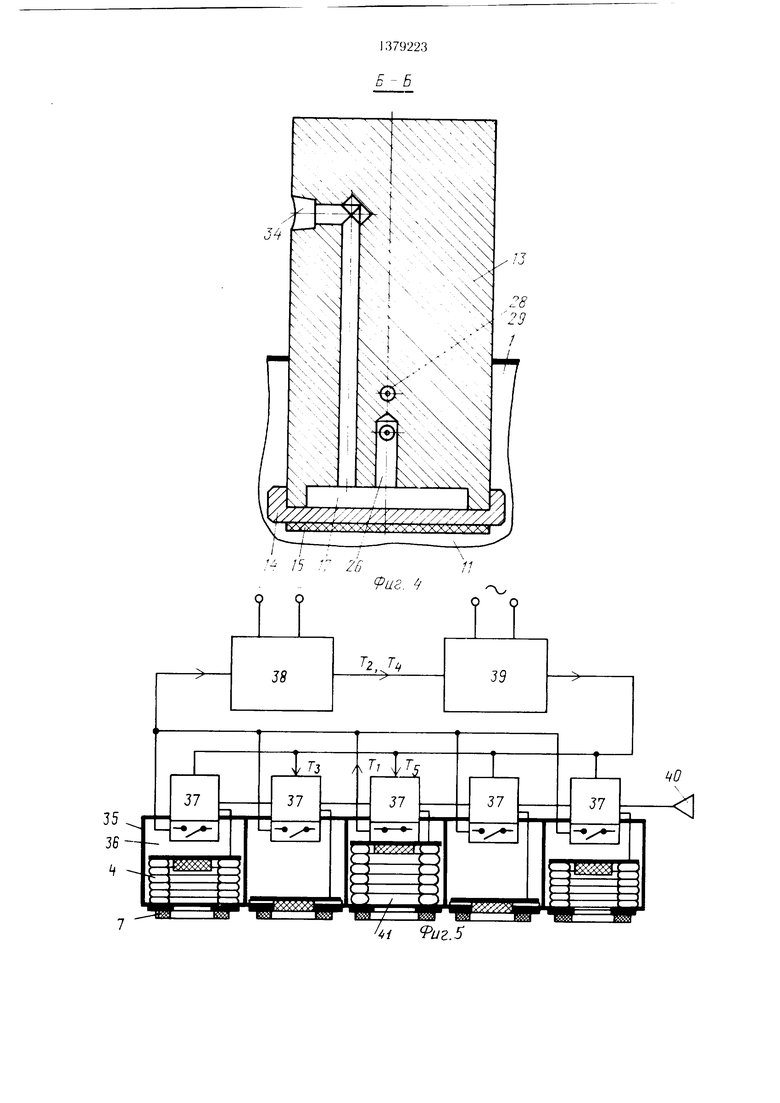
ЕЗозможен второй вариант зо.тотникового 0 управляющего уст| )ойства, в случае отжимные пружины 22 и 23 распо;|ожены мсж.чу регу,ти)ОЕ очпыми втулкамп 18 и 19 II пажпмнь1ми кнопками 24 и 25. На место кпопок 24 и 25 может быт1) закреплено лектрома|-нитное нажимное устройство. На базе конструкции цредла аемого вакуумного .захвата (фи|-. 1) можно изгото- вигь унравляемый секционный вакуумный захват. ((|)И|-. 5), нредставляюнщй собой iVHHOBoii 1 акуумный захват, в нолом корпусе 35 которого, разделенном iia секции 3f), пз().тировапп1 1С друг от д|)уга, установлена петая (,тастич 1ых вакуумобра зуюших камер, каждая и.з которьгх уирав.тяегся нс- нолпительным мехапизмом 37, представляющим собой зо.тотпиковое унрав.тяюшее ст- ройство ((jiHi. 3 и 4) г иажимпыми .тектро- магнитами вместо кнонок 24 и 25. Каждая секция секцношюго вакуумнот захвата име- ег конструкции), апа.тогичную изображеп- пой на фи1. I. (хе.М1)| уп)авления исполнительных механизмов 37 (фиг. 2) подсое- 0 диняются к управляющему б.току .38, изготов- лешному на базе счетно-)ен1аюшег() устройства и.тн микропроцессора. Управляющий б,ток 38 подсоединяется к командному блоку ;}9. Комапд|Ц)П 1 блок 39 связан со всеми исно.т- нигельиыми механизмами 37 секций .3(). ко- тч)|)ые в свою очередь нриссн днняются к источнику 40 сжатого газа.
акуу.мный захват с :.тастичной вакуум- обра.зующей камерой )аботает с.тедую1ц:.1м образом.
Q Вакуумн1)1Й захват че)ез канал 34 (фпг. 4) подсоединяется к источнику сжатого воздуха напрямую без понижения давления. Находящийся в по.тости 17 сжат1)1Й воздух воздействует на золотники 20 и 21, они начинают двигаться вверх. Нижний буртик золотника 5 21 перекроет канал 28 (29) раньше, чем не)хний буртик золотника 20 откроет его. Нижний буртик золотника 20 снача.та перекроет кана.т 26, затем отк)оет кана.т 28 (29)
Режим захвата груза (фиг. 1).
Вакуумный захват ставится на поверхность поднимаемого тела и нажимается кнопка 24. Золотник 20 движется вниз, перекрывая канал 28 (29) и канал 31 (фиг, 2),
Сжатый ВОЗДУХ из полости 17 по каналу 2t) через шланг 8 поступает во внутреннюю полость эластичной трубчатой конструкции 4, она, надуваясь (слева от осевой лини), сжимает воздух в полости II, который не допускает полного срабатывания вакуумобразующей ка.меры. В этот момент времени давление воздуха в полости 11 и во внутренней полости трубчатой конструкции будут равны. Образуется по, 1()сть 41 низкого давления. Вакуумный захват дав,-|е- нием атмосферы прижимается к поверхнос ти поднимаемого:) тела. Ма. юе сечение отверстия штуцера 27 (фиг. 2) позволяет увеличить до требуемой величин,| время заполнения сжатым воздухом внутренш й полости эластичной трубчатой конструкции, за- пиицая ее тем самым от повреждений, а также позволяет раболать вакуумному захвату без понижения давления сжатого воздуха.
Снимаем усилие нажатии с кнопки 24, золотник 20 возвращается ES исходное положение, перекрывая нижним буртиком канал 26 и открывая канал 28 (29), связывая напрямую но,тость 11 через кана, 1 31 (фиг. 3) с окружающей сред(.)й. /1авление сжатого воздуха в полости I 1 по кана.лу 31 через отверстие 33 малого сечения кла- папа 32 гкх тененно сграв.1ивается в атмосферу. Давление сжатого воздуха в полости 1 1 постепенно падает, а дав ление сжатого воздуха во внутренние полости эластичной трубчатой конструкции 4 остается неизменным. Вакуумобразуюшая камера под воздействием силы, возникающей от разности давлений, увеличивает свои размеры по вертикальной оси, увеличивая обт.ем полости 41 низкого давления, компенсируя тем самым нодтравливание воздуха чере.з ун. ют- нительную манжету 7 и сохраняя те.м самым неизменной величину грузопод i-емности вакуумного захвата. В момент полнов о срабатывания эластичной трубчатой конструкции 4 металлическая пластина 6 замыкает контакты 16 и загорается сигнальная лампочка (фиг. I) справа от осевой липии.
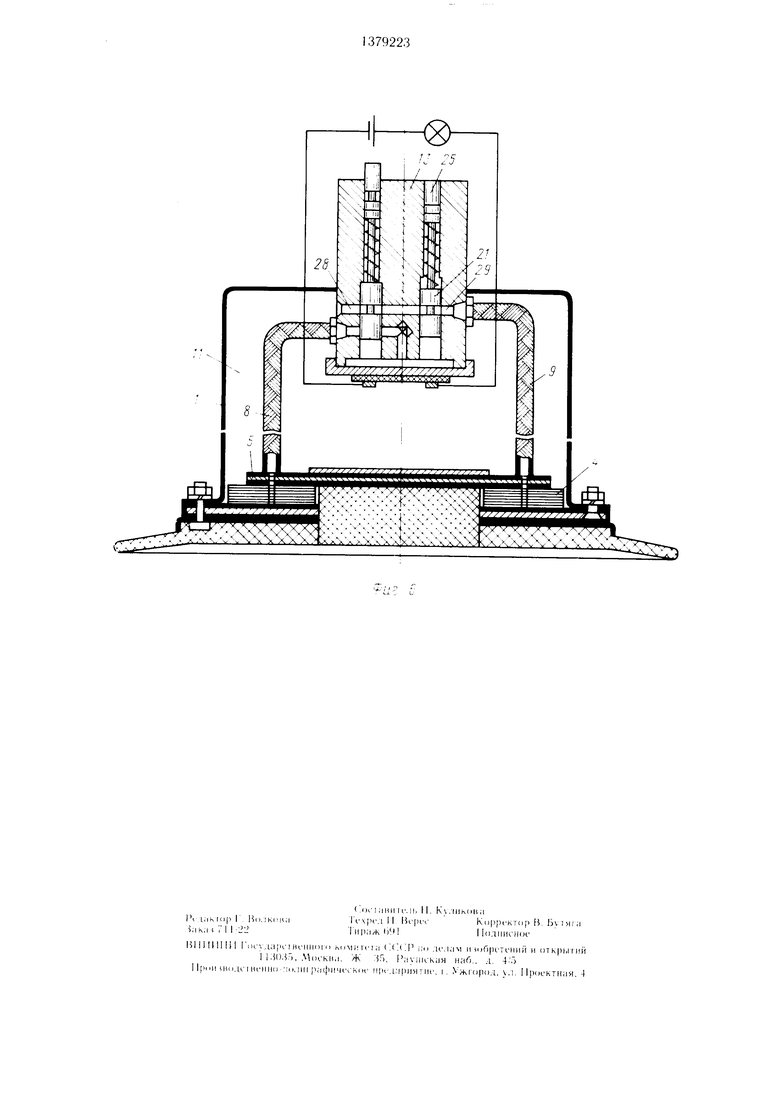
Режим отпускания груза (фиг. 6).
Нажимается кнопка 25, золотпик 21 движется вниз, открывая канал 28 (29). Сжатый газ из внутренней полости эластичной трубчатой конструкции 4 по 1план1Л 9 и каналу 28 (29) переходит в полость II, где возрастает давление воздуха, которое сжимает эластичную вакуумобразующую ка- .меру. Полость 41 схлопывается, груз отпускается.
В .межоперационное время избыток дав- ;|ения воздуха в полости 1 1 стравливается в атмосферу, но таким образом, чтобы остаточное давление прижимало диафрагму 5 вместе с эластичной вакуумобразуюн1ей камерой к поддону.
При использовании вакуумного захвата под водой все режимы работы выполняются аналогично онисанному. но требуется соблюдение следующих условий: сжат|)|й воздух подается к вакуумному захвату иод давлением, превышающем давление окру- жаюп1ей среды в месте проведепия работ, в
0 межоперационный период соответствует положению элементов вакуумног о захвата (фиг . 6), давление в полости II должно быть равным или превьппать дав.чение окружающей среды в месте нахождения ва, куумного захвата.
3
нравляемый секционный вакуумный :(а- хват работает следующим образом.
Вакуумный захват ставится на поверхность поднимаемого тела. В зависимости
0 от веса поднимаемого тела, технологических особенностей управляющий блок 38 выдает команду командному блоку 39 )ia вк:1К)чение определенн|51х секций. Секции срабатывают, вакуумный захват прижимается к поверх}|ости поднимаемого) те. га. В одной и: секций поступление атмосфергюгч) всхздуха в полость 41 низкого давления чем в оста. 1ьные. Она срабатывает и :(амыкаег контакты сигнальной схемы. Сигна,т Ti поступает в управ.чяюший блок ,38, который
Q оценивает состояние секций вакуумногч) захвата, выбирает замену и дает сигна,т Т. ко.мандному блоку 39, который в свою очередь выдает сигнал Ti исполнительному механизму 37 нужной секции. После срабатывания секции управляющий блок 38 даг ет ко.манду Т4 для возврата сработавшей секции в исходное ноложение командному блоку 39, который выдает команду Т-, испо.1- нительному механизму сработавигей секции. Режим сброса груза. На все иснолни- тельные механизмы 37 одновременно дается
0 команда сброса rpy:ia.
На управ.чяе.мом секционном вакуумном захвате можно управлять грузопод ьем- ностью и временем удержания груза.
При использовании секционного вакуумного захвата под водой сам вакумный :и1хват
5
5
может выполнять функцию понтона.
Формула изобретенп.ч
Вакуумный захват, содержащий по,|ый корпус, прикрепленную к его нижней части э.частичную манжету, ра: мешенные внутри корпуса одна над другой с обра:1ованием с плосжк тью :1авхатываемо1 о и:(де.п1я .метичной полости, сообщенной с полостью
эластичной манжеты., и сообшенньге между собой и с источником рабочего те.ча э.тас- тичнГ)1е тороидальные камерг с жесткой диафрагмой в верхггей частгг гг ггргктгособление для управлении образованиемран- ряжения, сообшеннсе с источникомрабочего тела, отличающийся тем,что, с ne. ibK) иовын1ения удобства вэкс- н.туатааии, он снабжен закрепленнойснирасположенными контактами на нижней но- верхности, включенными в цепь управления отключением упомянутого приспособления, и металлической /1ластиной, закрепленной сверху на диафрагме с возможностью вза.iy на корпусе упомянутого приспособления 5 имодействия с контактами диэлектрической диэлектрической пластиной с симметрично
пластины.
расположенными контактами на нижней но- верхности, включенными в цепь управления отключением упомянутого приспособления, и металлической /1ластиной, закрепленной сверху на диафрагме с возможностью взаимодействия с контактами диэлектрической
имодействи
пластины.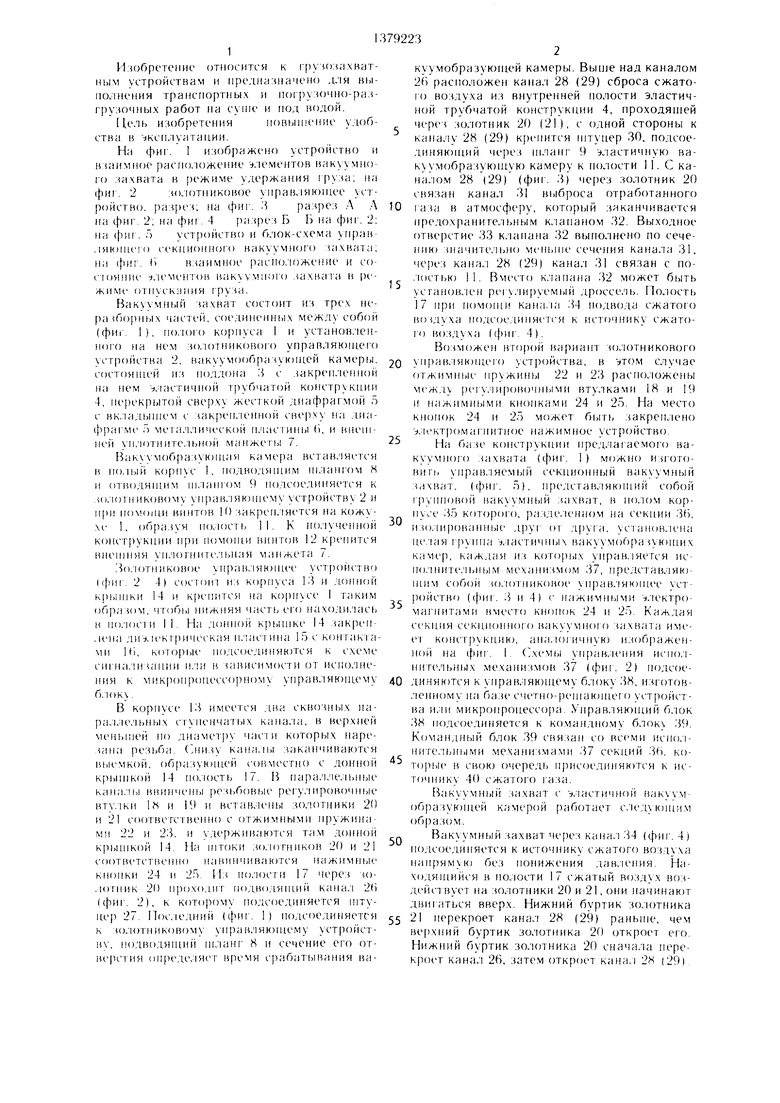
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1981 |
|
SU1558844A1 |
| Воздухораспределитель для тормозной системы прицепного транспортного средства Тригера Б.Г. и Цыганковой Т.Б. | 1982 |
|
SU1088971A1 |
| Кран машиниста | 1989 |
|
SU1787837A1 |
| ПАКЕР ГИДРАВЛИЧЕСКИЙ ДВУСТОРОННЕГО ДЕЙСТВИЯ | 1998 |
|
RU2160356C2 |
| ГИДРОПРИВОДНОЙ ПОГРУЖНОЙ НАСОСНЫЙ АГРЕГАТ | 2016 |
|
RU2628840C1 |
| Воздухораспределитель тормоза железнодорожного транспортного средства | 1985 |
|
SU1273282A1 |
| ГИДРАВЛИЧЕСКИЙ КЛЕПАЛЬНЫЙ ПРЕСС | 1969 |
|
SU247012A1 |
| Устройство для захвата и подачи слюдяных подборов | 1986 |
|
SU1331776A1 |
| СМЕСИТЕЛЬ И КРАН-ДОЗАТОР | 2004 |
|
RU2273783C1 |
| Ворота для доковых сооружений | 1980 |
|
SU885530A1 |
Изобретение отноеится к под ьемж)- 1 ранепортно.му .машиностроению, в частности к накуу.ми|, ;1а.хвата.м. Целью и.обретения я.1яется новышение удобства н :)КС11.луата- нии. Вакуумный .за. содержит полый 1. В нижней части корпуса I фнк)ен.1ена э.тстичная манжета 7. Внутри корнуса 1 расположены одна над другой тороидальные камеры 4. сообщенные с чластич- иой манжетой 7. К вер.хней части тороидальных ка.мер прикреплена диафрагма 5. К диафрагме 5 нрикрен.лена металлическая п;1астина 6. Вакуу.мный за.хват управляется приспособлением для образования разре ;е- ния и управления им, включаюнигм в себя ди-: лектрическую пластину 15. На ди:)лект- рической пластине 15 закрен.:ены контакты К), включенные в пень управления и предназначенные для взаимодействия с метал- . 1ической пластиной 6. () ил.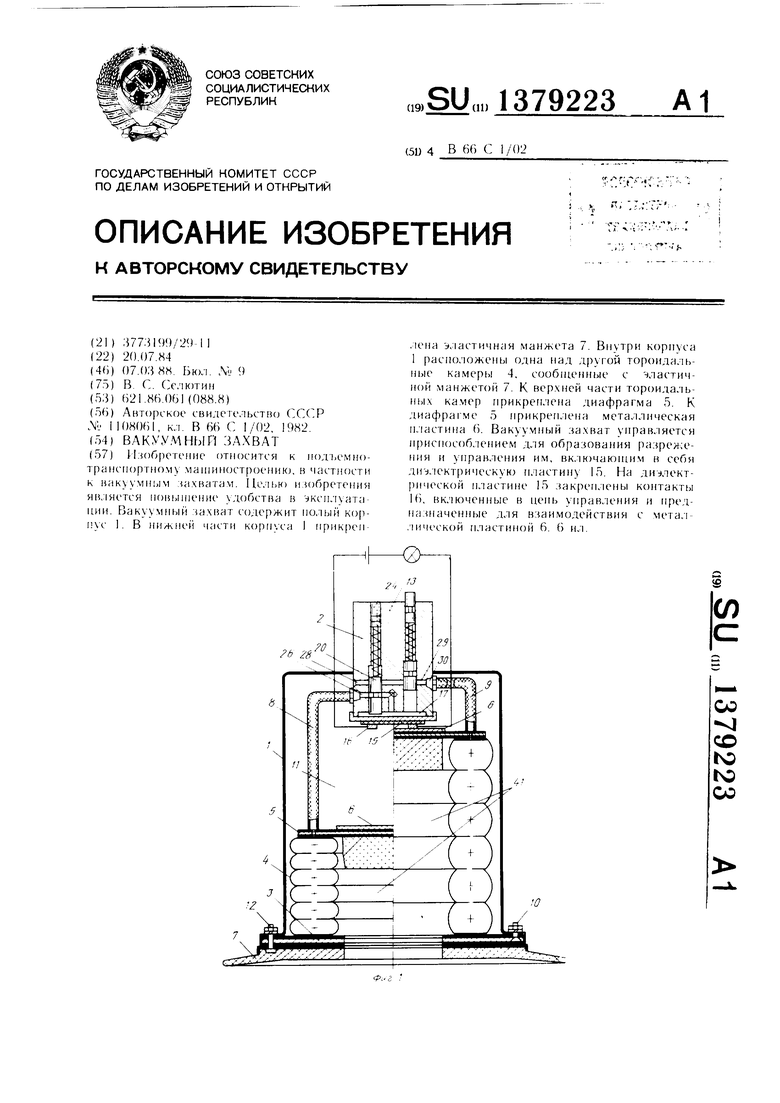
f 15 /7
иг.З
9иг.
-
L
9иг.5
| Вакуумный захват для работы в жидкой среде | 1982 |
|
SU1108061A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
