сл
СЛ
о
СО СЛ
Изобретение относится к измерительной технике и предназначено для экспериментального определения частотных характеристик динамических систем с обратной связью в системах автоматического контроля динамических объектов, в частности в системах управления и регулирования, ра- диотехничесЫх системах, содержащих частотно-зависимые замкнутые контуры.
Целью изобретения является расширение функциональных возможностей устройства.
На фиг.1 представлена блок-схема устройства для измерения частотных характеристик замкнутых автоматических систем; на фиг.2 - Ц - блок- схемы стандартных аналоговых вычис- лительных блоков, осуществляющих определение амплитудно-частотных и фазо-частотных характеристик объекта управления и блока обратной связи объекта управления в арифметичес ком блоке.
Устройство для измерения частотных характеристик замкнутых автоматических систем содержит последовательно соединенные элементы 1 и 2 сравнения, измеряемый объект 3 упраления, блок k обратной связи объект управления, элементы 5 и 6 сравнени модель 7 объекта управления и блок 8 модели обратной связи объекта управления, источник 9 гармонического сигнала изменяемой частоты, блоки 10-12 определения амплитуды, блоки 13 - 15 определения фазы, арифметический блок 16. Выход блока 8 модели обратной связи объекта управления соединен с вторым входом элемента 6 сравнения и первым входом элемента 1 сравнения. Выход источника 9 гармонического сигнала соединен с входами блока 12 определени амплитуды и блока 15 определения фазы и с вторыми входами элементов 1 и 5 сравнения. Выход блока Ц обратной связи объекта управления соединен с первым входом элемента 2 сравнения, с входом которого соединен выход элемента 1 сравнения. Выход измеряемого объекта 3 управления соединен с входными блока 10 определения амплитуды и блока 13 определения фазы, выход модели 7 объекта управления соединен с входами блока 1 определения амплитуды и блока 1 on
0 5
о ) и i(u)
ределения фазы. Выходы блоков 10 - 12 определения амплитуды и блоков 13-15 определения фазы соединены соответственно с первым - шестым входами арифметического блока 16, выходы которого являются выходом устройства для измерения частотных характеристик замкнутых автоматических систем.
Устройство для измерения частотных характеристик замкнутых автоматических систем работает следующим образом.
Источник 9 гармонического сигнала изменяемой частоты вырабатывает гар- монический сигнал, который можно записать в виде x(b) , где в(со) - угол сдвига фаз; из- частота. Этот сигнал поступает через элемент
1сравнения на второй вход элемента
2сравнения.
Частотная передаточная функция (ЧПФ) замкнутого преобразования исследуемой системы, включающей в себя элемент 2 сравнения, объект 3 управ-, ления и блок обратной связи объекта управления, имеет вид
сые ТмГ
A(w)e(u) i(io) ni. л i/i(
5 1+АМе
где Л(ы) и B(w)
0
5
0
и
/s(w)
) и Y(u)
5
B(u))e
-неизвестные амплитудно- частотные характеристики (ЛЧХ) объекта 3 управления и блока k обратной связи объекта управления соот вественно;
-фазочастотные характеристики (ФЧХ) соответственно объекта 3 управления и блока Ц обратной связи объекта управления;
-амплитуды сигналов на входе и выходе исследуемой системы, т.е. на первом входе элемента 2 сравнения и на выходе объекта
3 управления;
-фазовые углы;
/ Y.H
(w)-ufc)
y(u) if(w)-v(u) - соответственно АЧХ и ФЧХ замкнутого контура исследуемой системы.
Уравнение1 замкнутого контура модели, включающего в себя элемент 6 сравнения, модель 7 и блок 8 модели обратной связи объекта управления, имеет вид
1-Тж(ю1 Ґ«Ие
4V,(W)
UMHeiV M Л„Ме (и)
W BMMe Л)
- ЛЧХ;
ЧХ модели 7 и блока 8
модели обратной связи25
объекта управления соответственно;
- сигналы на первом входе
элемента 6 сравнения и 30 на выходе модели 7;
- фазовые углы.
,--/ ч i0(U)
Гармонический сигнал х(и))е
сравнивается с сигналом обратного преобразования модели (с выхода блока 8), на входе исследуемой системы формируется сигнал U (ы) пропорционально полученной разности в COOT- ветствии с уравнением
5 еЮ
15
Л)
25
30
35
К выбору модели 7 и блока 8 модели обратной связи объекта управления предъявляются следующие требования. Структуры блоков 7 и 8 должны соответствовать структуре блоков 3 и k, а диапазоны частот звеньев, реализующих блоки 7 и 8, - диапазонам частот звеньев, составляющих блоки 3 и Ь. Это означает, что идентичность блоков 3 и 7, Ь и 8 понимается как идентичность по порядку дифференциальных уравнений, описывающих работу указанных блоков. Если, например, объект 3 управления представляет собой типовое интегрирующее звено, то и модель 7 должна представлять собой типовое интегрирующее звено. Параметры же модели 7 и блока 8 модели обратной связи объекта управления выбираются произвольно, желательно в области малых значений.
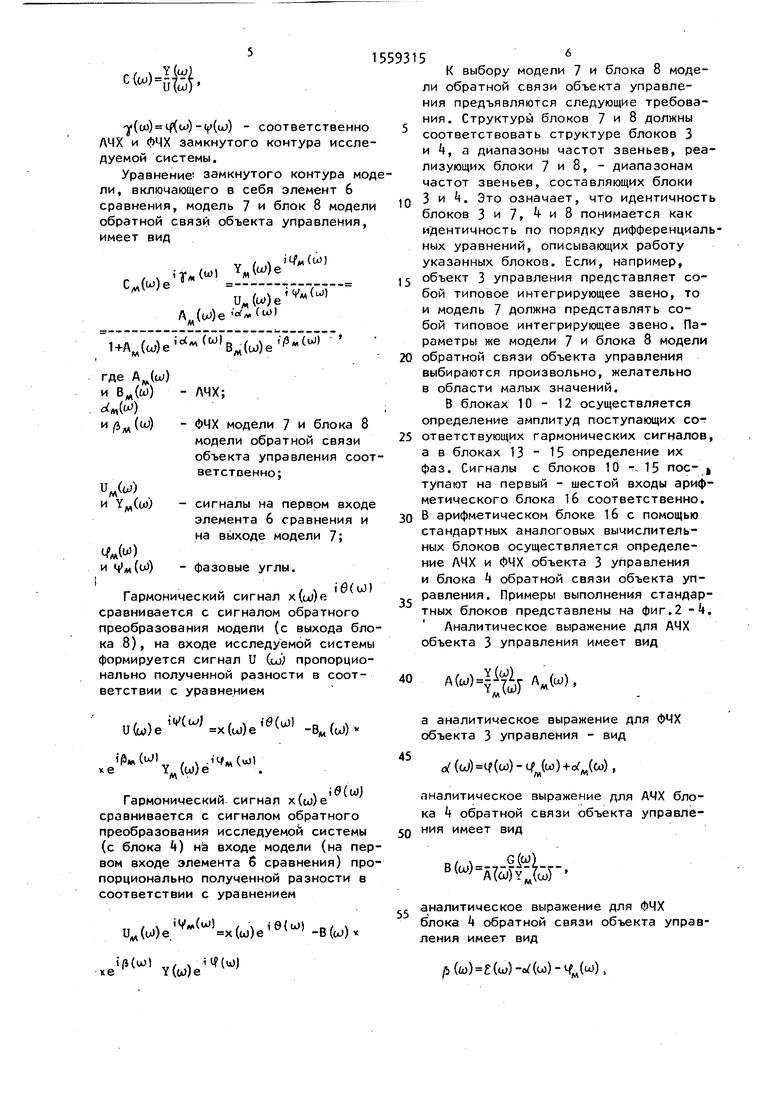
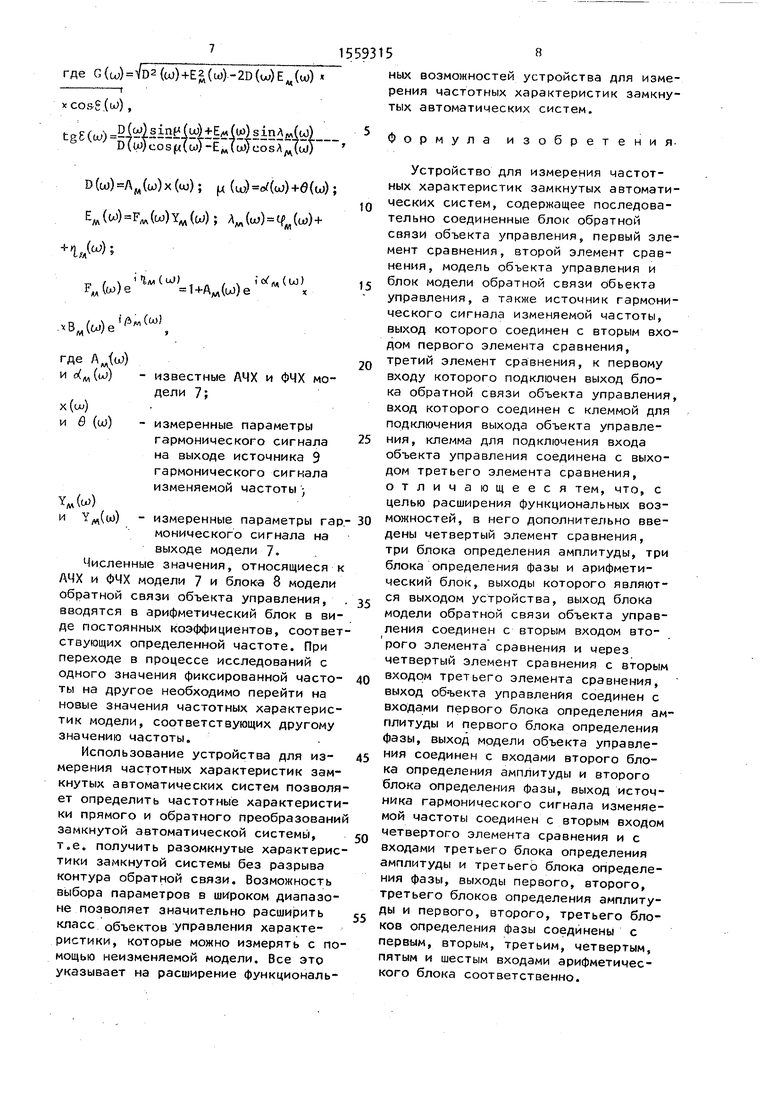
В блоках 10-12 осуществляется определение амплитуд поступающих соответствующих гармонических сигналов, а в блоках 13 - 15 определение их фаз. Сигналы с блоков 10 - 15 пос- t тупают на первый - шестой входы арифметического блока 16 соответственно. В арифметическом блоке 16 с помощью стандартных аналоговых вычислительных блоков осуществляется определение ЛЧХ и ФЧХ объекта 3 управления и блока k обратной связи объекта управления. Примеры выполнения стандартных блоков представлены на фиг.2 .
Аналитическое выражение для АЧХ объекта 3 управления имеет вид
АЖМ,
пЛ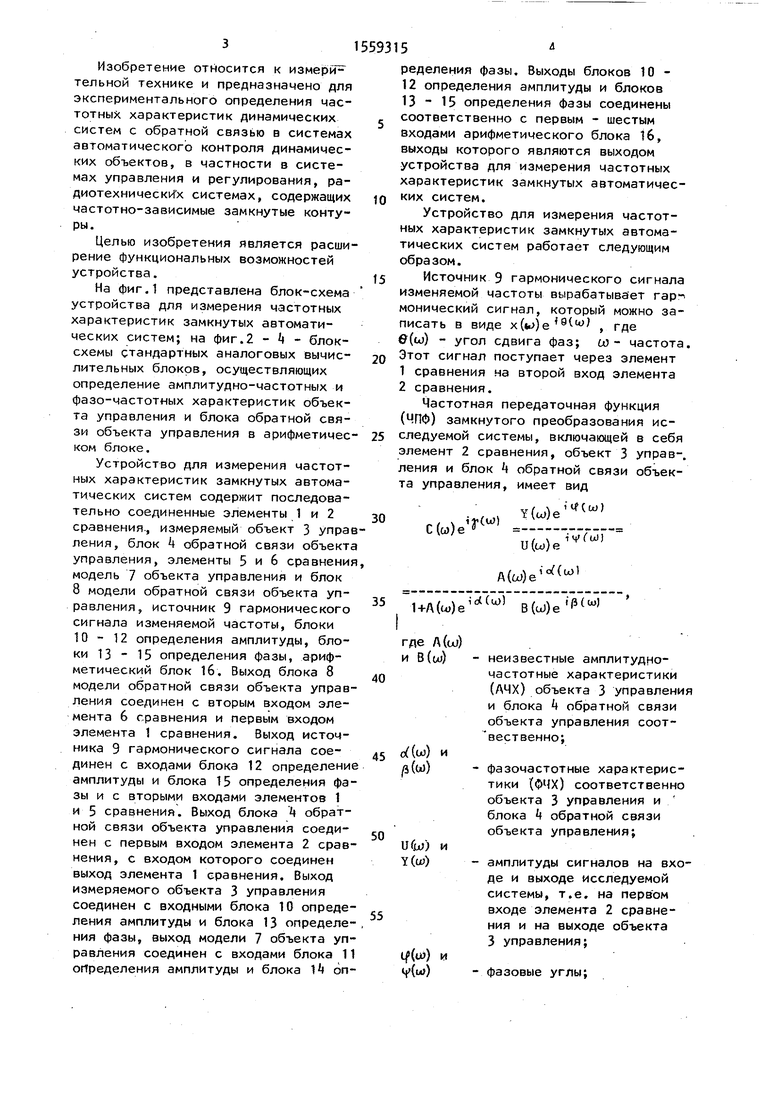
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2293962C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАСОВ УСТОЙЧИВОСТИ РУЛЕВОГО ПРИВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2474829C2 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| Способ ультразвуковой спектрометрии при исследовании биологических жидкостей | 2019 |
|
RU2723152C1 |
| Устройство для измерения фазочастотных характеристик четырехполюсников | 1977 |
|
SU691774A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2000 |
|
RU2200959C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПОДВИЖНЫХ ЭЛЕМЕНТОВ МИКРОМЕХАНИЧЕСКИХ УСТРОЙСТВ | 2011 |
|
RU2488785C1 |
Изобретение относится к измерительной технике и предназначено для экспериментального определения частотчных характеристик динамических систем с обратной связью. Цель изобретения - расширение функциональных возможностей. Источник 9 гармонического сигнала изменяемой частоты вырабатывает гармонический сигнал, который через элемент 1 сравнения поступает на второй вход элемента 2 сравнения, где сравнивается с сигналом с выходным сигналом блока 4 обратной связи объекта 3 управления. В элементе 5 сравнения гармонический сигнал с выхода источника 9 гармонического сигнала изменяемой частоты сравнивается с выходным сигналом блока 4 обратной связи объекта 3 управления и через элемент 6 сравнения поступает на вход модели 7, выходной сигнал которой через блок 8 модели обратной связи объекта управления поступает на первый вход элемента 1 сравнения. Выходные сигналы блоков 10-12 определения амплитуды и блоков 13-15 определения фазы поступают на входы арифметического блока 16. 4 ил.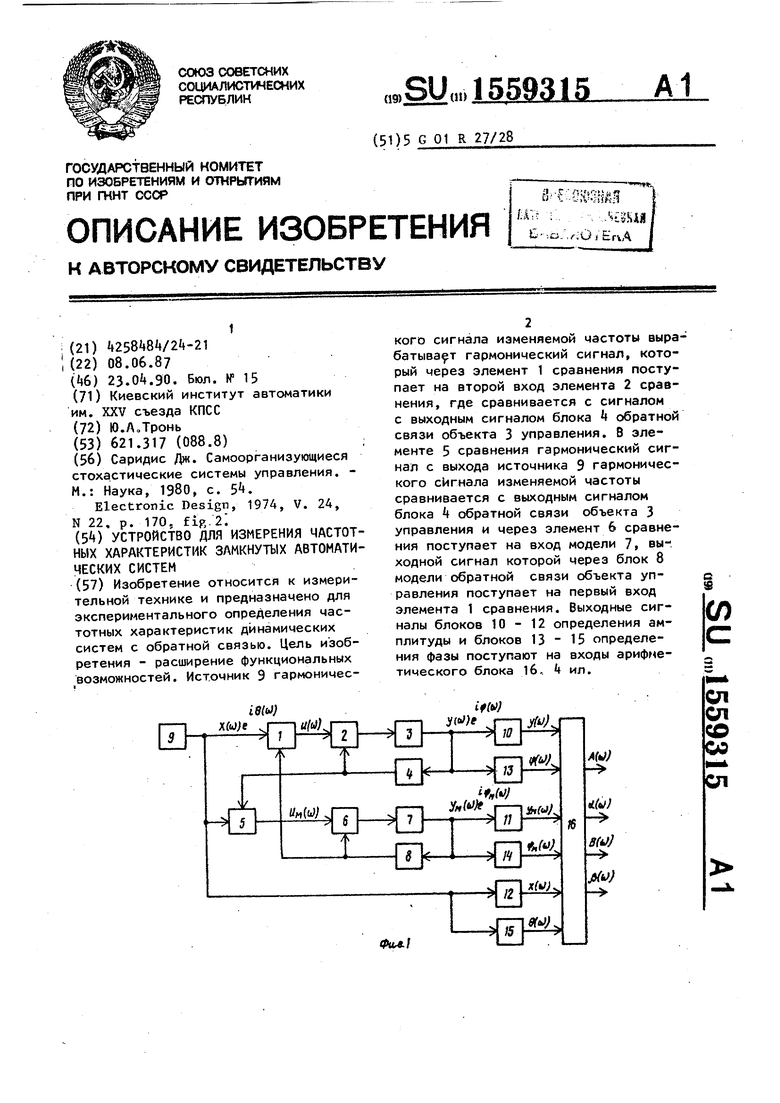
иЫе -хЫе1 -BUMJMt YM(W).
Гармонический сигнал х(ы)е сравнивается с сигналом обратного преобразования исследуемой системы (с блока Ц) на входе модели (на первом входе элемента б сравнения) пропорционально полученной разности в соответствии с уравнением
UM(u.)e V-M-x(U)eie(ta )-BM- хе{(Ы)
45
а аналитическое выражение для ФЧХ объекта 3 управления - вид
cl (cj)(w) - i/M(u))+rfM(to),
аналитическое выражение для АЧХ блока Ц обратной связи объекта управле- 50 ния имеет вид
вЫ АТй у;Ьг
55 аналитическое выражение для ФЧХ
блока 4 обратной связи объекта управления имеет вид
(ш)-(оо),
715 5931
где G(co)1/D2(w)+E2(u))-2DMEJUM «
cosSM,
tpg ы 5HsiacM±lfiMsi55ffM 5
Cg(HW DMcosft(w)-EM(u))eosAM(ui)
D(co)AM(w)xM ; (Д (ш)о/М+(9(и));
EM(U))FM(W)YM(W); лл„М ч /иЫ+
iV M (uj)
Ые -НАмМе1
),
где Ам(и)
и du, (u;) - известные АЧХ и ФЧХ
дели 7;
хМ
и в (со) - измеренные параметры
гармонического сигнала на выходе источника 9 гармонического сигнала изменяемой частоты ;
д
и YM(u) - измеренные параметры гар- монического сигнала на выходе модели 7.
Численные значения, относящиеся к АЧХ и ФЧХ модели 7 и блока 8 модели обратной связи объекта управления, . вводятся в арифметический блок в виде постоянных коэффициентов, соответствующих определенной частоте. При переходе в процессе исследований с одного значения фиксированной часто- ты на другое необходимо перейти на новые значения частотных характеристик модели, соответствующих другому значению частоты.
Использование устройства для из- мерения частотных характеристик замкнутых автоматических систем позволяет определить частотные характеристики прямого и обратного преобразований замкнутой автоматической системы, т.е. получить разомкнутые характеристики замкнутой системы без разрыва контура обратной связи. Возможность выбора параметров в широком диапазоне позволяет значительно расширить класс объектов управления характеристики, которые можно измерять с помощью неизменяемой модели. Все это указывает на расширение функциональ
5
0
5
0
25
30
35 40
45 50 55
58
ных возможностей устройства для измерения частотных характеристик замкнутых автоматических систем.
Формула изобретения
Устройство для измерения частотных характеристик замкнутых автоматических систем, содержащее последовательно соединенные блок обратной связи объекта управления, первый элемент сравнения, второй элемент сравнения, модель объекта управления и блок модели обратной связи обьекта управления, а также источник гармонического сигнала изменяемой частоты, выход которого соединен с вторым входом первого элемента сравнения, третий элемент сравнения, к первому входу которого подключен выход блока обратной связи объекта управления, вход которого соединен с клеммой для подключения выхода объекта управления, клемма для подключения входа объекта управления соединена с выходом третьего элемента сравнения, отличающееся тем, что, с целью расширения функциональных возможностей, в него дополнительно введены четвертый элемент сравнения, три блока определения амплитуды, три блока определения фазы и арифметический блок, выходы которого являются выходом устройства, выход блока модели обратной связи объекта управления соединен с вторым входом второго элемента сравнения и через четвертый элемент сравнения с вторым входом третьего элемента сравнения, выход об-ъекта управления соединен с входами первого блока определения амплитуды и первого блока определения фазы, выход модели объекта управления соединен с входами второго блока определения амплитуды и второго блока определения фазы, выход источника гармонического сигнала изменяемой частоты соединен с вторым входом четвертого элемента сравнения и с входами третьего блока определения амплитуды и третьего блока определения фазы, выходы первого, второго, третьего блоков определения амплитуды и первого, второго, третьего блоков определения фазы соединены с первым, вторым, третьим, четвертым, пятым и шестым входами арифметического блока соответственно.
Y().
УМ
i /
S4f
АГ/Ч
f
У/
Составитель Ю.Минкин Редактор Н.Лазаренко Техред Л.Сердюкова
Заказ 836
Тираж
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. Ь/$
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина,101
fLoA()U
A(}
Фиг 2
. i/ fov/i
и
фиг. 5
Фиг.4Корректор Л. Патай
Подписное
| Саридис Дж | |||
| Самоорганизующиеся стохастические системы управления | |||
| - Н.: Наука, 1980, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Electronic Design, 1974, V | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Аппарат для передачи фотографических изображений на расстояние | 1920 |
|
SU170A1 |
| fig | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
