Изобретение относится к области испытаний систем автоматического управления, в частности к области экспериментальных исследований рулевых приводов и предназначено для определения запасов устойчивости рулевого привода с комбинированной многоконтурной системой управления и может быть использовано в авиационной и ракетной технике. Известен способ определения запаса устойчивости рулевого привода, при котором гармоническим сигналом возбуждают привод с полностью разомкнутым контуром и, варьируя частоту возбуждающего сигнала, находят критическую частоту ωкр, при которой запаздывание установившейся реакции разомкнутого привода относительно возбуждающего сигнала составляет 180 градусов. На этой частоте ωкр измеряют амплитуду отношения установившейся реакции привода к возбуждающему сигналу и находят запасы устойчивости (см. А.А.Лебедев и В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр.57, 58). Устройство, реализующее данный способ, содержит механический генератор, исследуемую систему, осциллоскоп (см. Ж.Жиль, М.Пелегрен, П.Декольн. Теория и техника следящих систем. - М.: Государственное научно-техническое издательство машиностроительной литературы, 1961 г., стр.210, фиг.7.26).
Недостатком способа и устройства для его реализации является уход штока рулевого привода в крайнее положение при размыкании системы управления и длительном процессе снятия частотных характеристик. Наиболее близким к предлагаемому способу, выбранному в качестве прототипа, является способ определения запасов устойчивости замкнутых систем управления по частотным характеристикам передаточной функции разомкнутой системы.
Для исследования следящей системы (например, рулевого привода) обычно пользуются ее структурной схемой, которая представляет замкнутый контур, содержащий прямую ветвь (цепь), входом которой является ошибка или разность между входом и общим выходом следящей системы, обратную связь, которая служит для сравнения управляющего воздействия и величины реакции (см. Ж.Жиль, М.Пелегрен, П.Декольн. - М.: Государственное научно-техническое издательство машиностроительной литературы, 1961 г., стр.313, 314, 363).
Устройство, реализующее данный способ, содержит привод с системой управления и анализатор частотных характеристик, состоящий из генератора, коррелятора и дисплея (см. Frequency Response Analyzers 1172, Operating Manual, partNOA1720165, Date of issue: July 1975, p 1.2).
Недостатком способа и устройства для его реализации является ограниченная область применения, так как способ и устройство применимы к одноконтурным системам управления приводами с единичной обратной связью. Способ и устройство для его реализации не позволяют определять запасы устойчивости по амплитуде и фазе рулевых приводов с комбинированной многоконтурной системой управления, в которой имеются параллельные связи и одновременное разветвление входного сигнала по разным контурам (см. Л.В.Рабинович и др. Динамика следящих приводов. - М.: Машиностроение, 1982 г., стр.231-235).
Техническим результатом является экспериментальное определение запасов устойчивости рулевых приводов с многоконтурной системой управления.
Технический результат достигается тем, что в способе определения запасов устойчивости рулевого привода с многоконтурной системой управления, основанном на подаче на его вход возбуждающего гармонического сигнала, сначала снимают частотную логарифмическую характеристику участка контура с электромеханической и силовой частью привода, затем задают на вход привода нулевой сигнал, нагружают выходное звено привода гармонической силой и снимают частотную логарифмическую характеристику остального электрического участка контура. По сумме логарифмических частотных характеристик участка контура с электромеханической и силовой частью привода и логарифмических частотных характеристик электрического участка контура получают логарифмические частотные характеристики разомкнутого контура привода и определяют запас устойчивости рулевого привода по амплитуде nа=1/Акр, где Акр - амплитудное значение на критической частоте, фазовое запаздывание на которой составляет 180 градусов, а также определяют запас устойчивости привода по фазе Δφ=180-φcp, где φcp - фазовое запаздывание на частоте среза, амплитуда на которой равна единице.
Поставленная задача достигается также тем, что в устройстве для определения запасов устойчивости рулевого привода, содержащем анализатор частотных характеристик, установлены нагружатель и второй анализатор частотных характеристик, который подключен к входу нагружателя, первый анализатор частотных характеристик подключен к входу испытуемого рулевого привода, а нагружатель - к выходному звену испытуемого рулевого привода.
На фиг.1 показана схема устройства для определения запасов устойчивости рулевого привода с многоконтурной системой управления по предлагаемому способу.
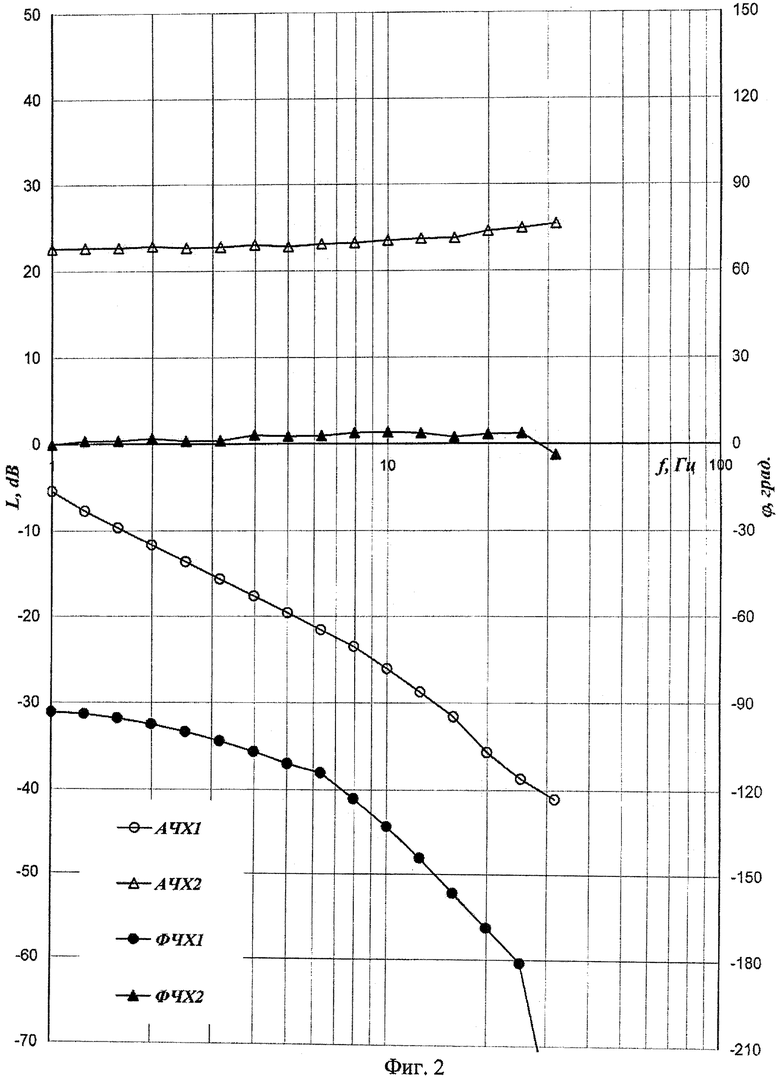
На фиг.2 приведены логарифмические амплитудные и фазовые частотные характеристики (ЛФЧХ) участка контура с электромеханической и силовой частью привода и ЛФЧХ электрического участка. АЧХ 1 - амплитудная характеристика, ФЧХ 1 - фазовая характеристика электромеханической и силовой части привода. АЧХ 2 и ФЧХ 2 аналогичные характеристики электрического участка контура.
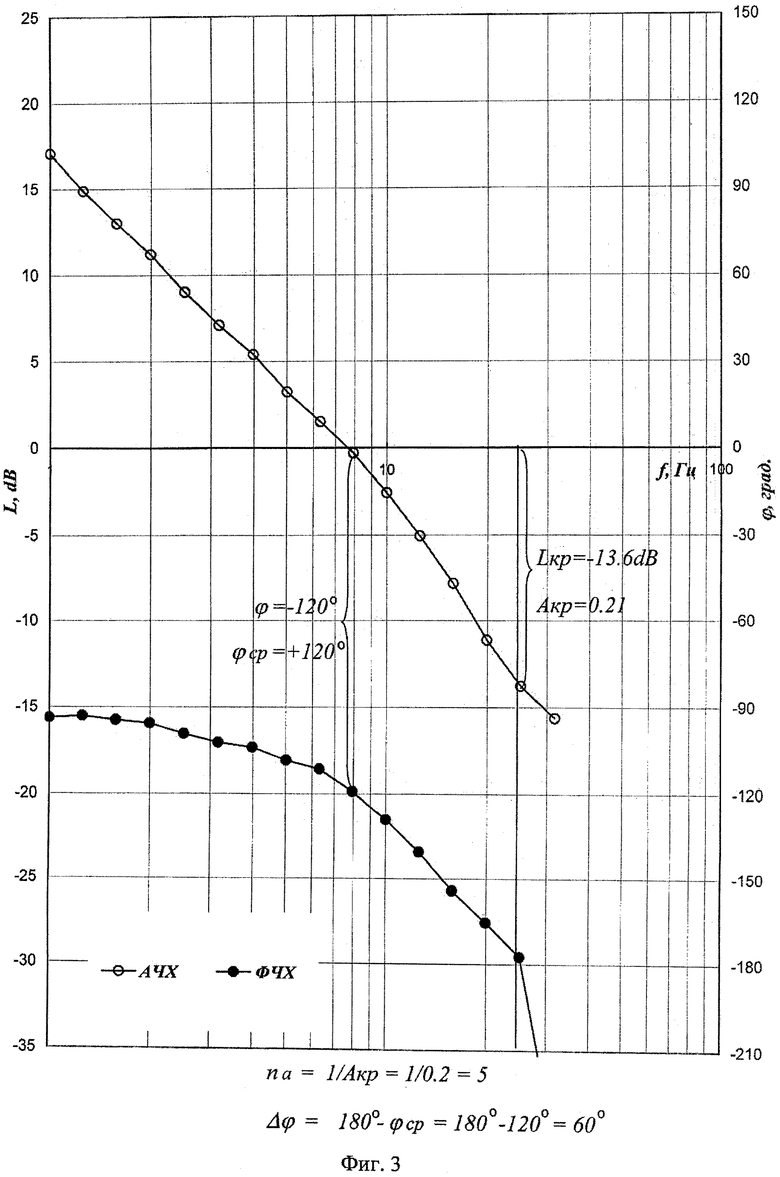
На фиг.3 приведена логарифмическая амплитудно-фазовая частотная характеристика (ЛАФЧХ) разомкнутого контура привода, полученная путем сложения амплитуд АЧХ 1 и АЧХ 2, а также фаз ФЧХ 1 и ФЧХ 2, взятых из фиг.2.
Устройство для определения запасов устойчивости рулевого привода состоит из анализатора частотных характеристик 1, нагружателя 2, второго анализатора частотных характеристик 3 и рулевого привода 4.
Первый анализатор частотных характеристик 1 соединен с входом привода 4, второй (дополнительный) анализатор частотных характеристик 3 подключен к входу нагружателя 2, а выход нагружателя 2 соединен с выходным звеном привода 4.
В качестве анализаторов частотных характеристик 1 и 3 может быть использован анализатор частотных характеристик фирмы “Solartron” (см. Frequency Response Analyser 1172, Operating Manual, part NOA1720165, Date оf issue: July 1975), в качестве нагружателя может быть использован, например, электрогидравлический следящий привод по авторскому свидетельству №1512244, кл. G05B 23/00.
С анализатора частотных характеристик 1 на вход испытуемого рулевого привода 4 подают гармонический возбуждающий сигнал и сначала по сигналу на входе электромеханической части привода снимают частотную характеристику участка контура с электромеханической и силовой частью привода, затем с анализатора частотных характеристик 1 задают на вход привода 4 нулевой сигнал, с анализатора частотных характеристик 3 на вход нагружателя 2 подают гармонический сигнал и по этому сигналу нагружатель 2 воздействует на выходное звено привода 4 гармонической силой, по сигналу просадки привода, взятому с датчика положения штока привода, снимают частотную характеристику остального электрического участка контура с комбинированной многоконтурной системой управления. По сумме снятых логарифмических характеристик получают частотную характеристику разомкнутого контура привода и определяют запас устойчивости рулевого привода по амплитуде nа=1/Акр, где Акр - амплитудное значение на критической частоте, фазовое запаздывание на которой составляет 180 градусов, а также определяют запас устойчивости привода по фазе Δφ=180-φcp, где φcp - фазовое запаздывание на частоте среза, амплитуда на которой равна единице.
Предлагаемое техническое решение обеспечивает возможность определения запасов устойчивости рулевых приводов с комбинированной многоконтурной системой управления. Это достигается благодаря тому, что кроме частотной характеристики, снятой по входному возбуждающему сигналу участка контура с электромеханической и силовой частью рулевого привода, также при подаче на вход привода нулевого сигнала снимают частотную характеристику остального электрического участка контура с комбинированной многоконтурной системой управления по сигналу просадки, полученной за счет нагружения выходного звена привода гармонической силой с помощью нагружателя. Технико-экономическая эффективность предлагаемого технического решения была подтверждена при экспериментальных исследованиях рулевого привода с комбинированной многоконтурной системой управления перспективного самолета. На фиг.2 приведены логарифмические частотные характеристики L=F(f) в dB и φ=F(f) в градусах, снятые по сигналу на входе электромеханической части привода, составляющему 50% от максимального сигнала и логарифмические частотные характеристики, снятые по сигналу просадки, полученной за счет нагружения выходного звена привода с помощью силовозбудителя гармонической силой 5 тс, составляющей 25% от максимальной силы привода.
На фиг.3 нанесены значения Акр и φср, и по ним вычислены запас устойчивости по амплитуде nа=5,0 и запас устойчивости по фазе Δφ=60 градусов.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С АВТОКОЛЕБАТЕЛЬНЫМ ПРИВОДОМ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ | 2010 |
|
RU2435131C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| Способ стабилизации движения летательного аппарата со структурно неустойчивым осциллятором | 2018 |
|
RU2670328C1 |
Изобретение относится к экспериментальным исследованиям приводов систем автоматического управления и предназначено для определения запасов устойчивости рулевого привода. Предлагается способ, в котором вначале снимают логарифмическую частотную характеристику участка контура электромеханической и силовой части привода путем подачи на его вход гармонического сигнала, например от анализатора частотных характеристик, а затем задают на вход привода нулевой сигнал, нагружают выходное звено привода гармонической силой, например нагружателем, на вход которого подают гармонический сигнал от второго анализатора частотных характеристик и снимают логарифмическую частотную характеристику электрической части системы управления. По сумме логарифмических частотных характеристик получают логарифмическую частотную характеристику разомкнутого контура привода и по ней определяют запасы устойчивости привода по амплитуде и по фазе. Также предлагается устройство для определения запасов устойчивости рулевого привода, состоящее из двух анализаторов частотных характеристик, нагружателя и привода.
Техническим результатом изобретения является экспериментальное определение запасов устойчивости рулевых приводов с многоконтурной системой управления. 2 н.п. ф-лы, 3 ил.
1. Способ определения запасов устойчивости рулевого привода, основанный на подаче на его вход возбуждающего гармонического сигнала, отличающийся тем, что сначала снимают логарифмическую частотную характеристику участка контура с электромеханической и силовой частью привода, затем задают на вход привода нулевой сигнал, нагружают выходное звено привода гармонической силой и снимают логарифмическую частотную характеристику остального электрического участка контура с комбинированной многоконтурной системой управления, по сумме логарифмических частотных характеристик участка контура с электромеханической и силовой частью привода и логарифмических частотных характеристик электрического участка контура получают логарифмические частотные характеристики разомкнутого контура привода и определяют запас устойчивости рулевого привода по амплитуде nа=1/Акр, где Акр - амплитудное значение на критической частоте, фазовое запаздывание на которой составляет 180°, а также определяют запас устойчивости привода по фазе Δφ=180-φср, где φср - фазовое запаздывание на частоте среза, амплитуда на которой равна единице.
2. Устройство для определения запасов устойчивости рулевого привода, содержащее анализатор частотных характеристик, отличающееся тем, что в нем установлены нагружатель и второй анализатор частотных характеристик, который подключен к входу нагружателя, первый анализатор частотных характеристик подключен к входу испытуемого рулевого привода, а нагружатель - к выходному звену испытуемого рулевого привода.
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| Способ определения характеристик продольной управляемости и устойчивости самолетов | 1972 |
|
SU1839900A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПРОДОЛЬНОЙ УПРАВЛЯЕМОСТИ И УСТОЙЧИВОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1971 |
|
SU1839874A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| US 5544715 А, 13.08.1996 | |||
| US 4607201 А, 19.08.1986 | |||
| JP 3294909 А, 26.12.1991 | |||
| JP 2007282317 А, 25.10.2007. | |||

