обеспечения возможности вращательного ю Потребляемая мощность механизма 11,
характеристика пружин 8, масса шток 6 и масса маховика 3 соотносятся таким образом, что в рабочем режиме сила инерции маховика 3 обеспечивае прохождение кривошипом А его крайни верхнего и нижнего положений,когда осевые линии штоков 6 расположены в одной плоскости и составляющая сила вращения от взаимодействия штоков
движения кривошипа.
На чертеже изображена кинематическая схема резонансного при вода„
Резонансный привод содержит двигатель 1, соединенный с валом 2, на jj котором закреплен маховик 3 и кривошип А. Маховик 3 установлен с возмож-. ностью взаимодействия с тормозным устройством 5, предназначенным (при нехарактеристика пружин 8, масса штоков 6 и масса маховика 3 соотносятся таким образом, что в рабочем режиме сила инерции маховика 3 обеспечивает прохождение кривошипом А его крайних верхнего и нижнего положений,когда осевые линии штоков 6 расположены в одной плоскости и составляющая сила вращения от взаимодействия штоков 6
обходимости) для ускоренного снижения 2Q с кривошипом k равна нулю, а нагрузоборотов привода при его выключении. С кривошипом 4 шарнирно соединены одни концы штоков 6, другие концы которых установлены с возможностью продольного перемещения во втулках 7, шарнирно связанных с основанием. Кривошип k подпружинен к основанию с помощью двух расположенных по обе стороны от кривошипа упругих элементов
ка на вал от механизма 11 компенсируется избыточной (для автоколебаний) силой инерции подвижных частей при-, вода. В результате привод работает 25 в авторезонансном режиме.
Для остановки привода производится выключение двигателя 1 и муфты сцепления 12, а затем последовательно включается тормозное устройство 5 и фикса(пружин) 8, одни концы которых связа- Зо тор 9 фиксируя привод в исходном поны со штоками 6, а другие - с втулками 7. Кроме того, на одной из втулок
7закреплен фиксатор 9 с возможностью взаимодействия с упором 1-0, установленным на конце одного из штоков 6 для фиксирования привода в .исходном положении, при котором шток 6 выдвигается на максимальную величину. Вал 2 соединяется с исполнительным механизмом 11 с помощью муфты сцепления 12.
Пусковое устройство двигателя 1, привод фиксатора 9, приводы муфты сцепления 12 и тормозного устройства 5 связаны между собой электрической схемой управления (не показана).
Резонансный привод работает следующим образом.
Одновременно с включением двигателя 1 фиксатор 9 отводится от упора 10 и под действием пружин 8 и двигателя 1 маховик 3 начинает раскручиваться.
8этот пусковой период мощность двигателя 1 расходуется на преодоление генерации маховика 3 и сил трения в приводе. Затем муфтой сцепления 12 с
ложении.
Ф
ормула изобретения.
35
40
45
50
55
1.Резонансный привод, содержащий установленный на основании двигатель, на валу которого закреплен кривошип, упругий элемент, один конец которого связан с основанием, а другой - с кривошипом, и фиксатор положения кривошипа, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспе ения возможности вращательного движения кривошипа, он снабжен маховиком, связанным с валом двигателя, дополнительным упругим элементом и двумя штоками, расположенными по обе стороны от кривошипа, одни концы которых шарнирно связаны с кривошипом, а другие - с основанием, при этом упругие элементы расположены на этих штоках.
2.Привод по п.1, отличающий с я тем, что фиксатор установлен на основании с возможностью взаимодействия с одним из штоков.
Потребляемая мощность механизма 11,
характеристика пружин 8, масса штоко 6 и масса маховика 3 соотносятся таким образом, что в рабочем режиме сила инерции маховика 3 обеспечивает прохождение кривошипом А его крайних верхнего и нижнего положений,когда осевые линии штоков 6 расположены в одной плоскости и составляющая сила вращения от взаимодействия штоков 6
с кривошипом k равна нулю, а нагрузка на вал от механизма 11 компенсируется избыточной (для автоколебаний) силой инерции подвижных частей при-, вода. В результате привод работает в авторезонансном режиме.
Для остановки привода производится выключение двигателя 1 и муфты сцепления 12, а затем последовательно включается тормозное устройство 5 и фиксатор 9 фи
ложении.
Ф
ормула изобретения.
1.Резонансный привод, содержащий установленный на основании двигатель, на валу которого закреплен кривошип, упругий элемент, один конец которого связан с основанием, а другой - с кривошипом, и фиксатор положения кривошипа, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспе ения возможности вращательного движения кривошипа, он снабжен маховиком, связанным с валом двигателя, дополнительным упругим элементом и двумя штоками, расположенными по обе стороны от кривошипа, одни концы которых шарнирно связаны с кривошипом, а другие - с основанием, при этом упругие элементы расположены на этих штоках.
2.Привод по п.1, отличающий с я тем, что фиксатор установлен на основании с возможностью взаимодействия с одним из штоков.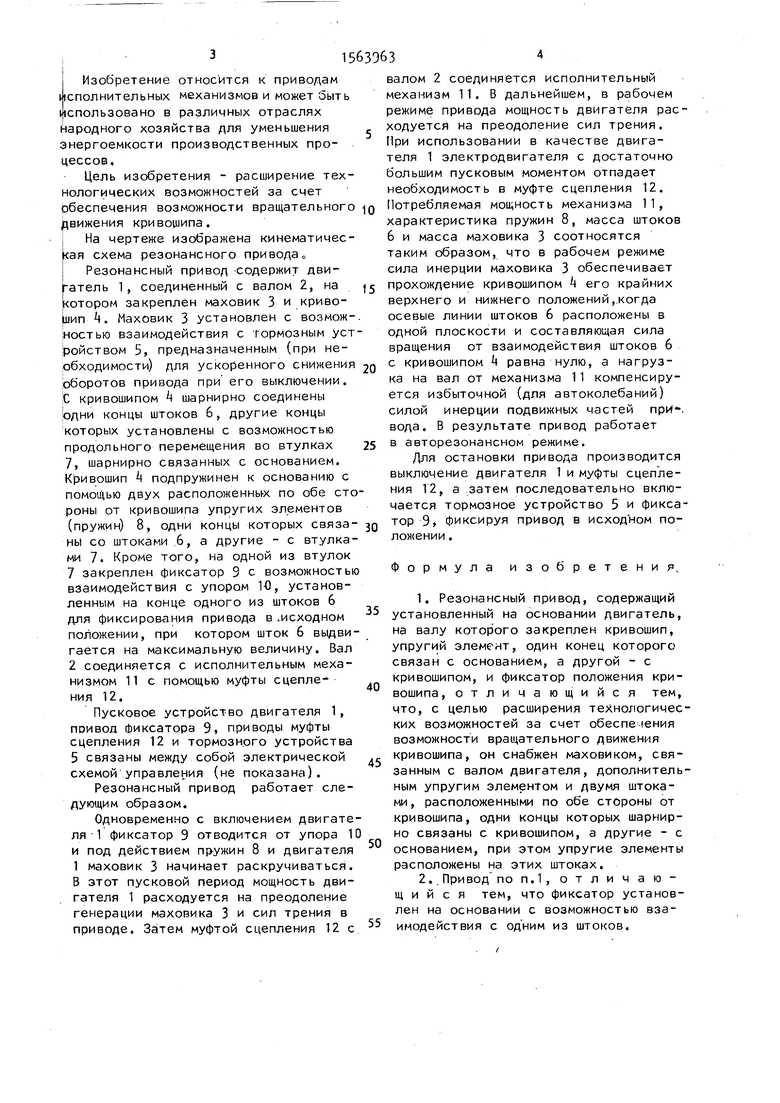
| название | год | авторы | номер документа |
|---|---|---|---|
| Лабораторная установка для исследования шарнирно-рычажного преимущественно кривошипно-ползунного механизма | 1985 |
|
SU1341670A1 |
| МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2472951C2 |
| Способ динамической балансировкидВигАТЕлЕй ВНуТРЕННЕгО СгОРАНия иуСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU823920A1 |
| Рекуперационный аппарат для текстильных отделочных машин | 1990 |
|
SU1772260A1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ СВОБОДНО-ПОРШНЕВОЙ С ПОСТОЯННЫМ ПЛЕЧОМ СИЛЫ МОМЕНТА НА ВАЛУ | 2002 |
|
RU2239075C2 |
| МЕХАНИЗМ ОСТАНОВА ЗАГОТОВКИ | 1972 |
|
SU346198A1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2005 |
|
RU2308603C2 |
| УСТРОЙСТВО И СПОСОБ СТРЕЛОЧНОГО ПЕРЕВОДА | 2009 |
|
RU2521061C2 |
| Устройство для динамической балансировки двигателей | 1987 |
|
SU1408270A1 |
Изобретение относится к приводам исполнительных механизмов и может быть использовано в различных отраслях народного хозяйства для уменьшения энергоемкости производственных процессов. Целью изобретения является расширение технологических возможностей за счет обеспечения возможности вращательного движения кривошипа. При включении двигателя 1 и расфиксации одного из штоков 6, на которых расположены пружины 8,под действием этих пружин и двигателя 1 начинает вращаться кривошип 4 и раскручиваться маховик 3. При этом мощность двигателя 1 расходуется на преодоление инерции маховика и сил трения. Затем муфтой сцепления 12 вал 2 соединяется с исполнительным механизмом 11 и в дальнейщем двигатель 1 служит для покрытия потерь от сил трения. Сила инерции маховика 3 обеспечивает прохождение кривошипом 4 "мертвых" точек. Остановка привода осуществляется за счет взаимодействия тормоза 5 с маховиком и последующей фиксации одного из штоков 6 в положении его наибольшего выдвижения. 1 з.п. ф-лы, 1 ил.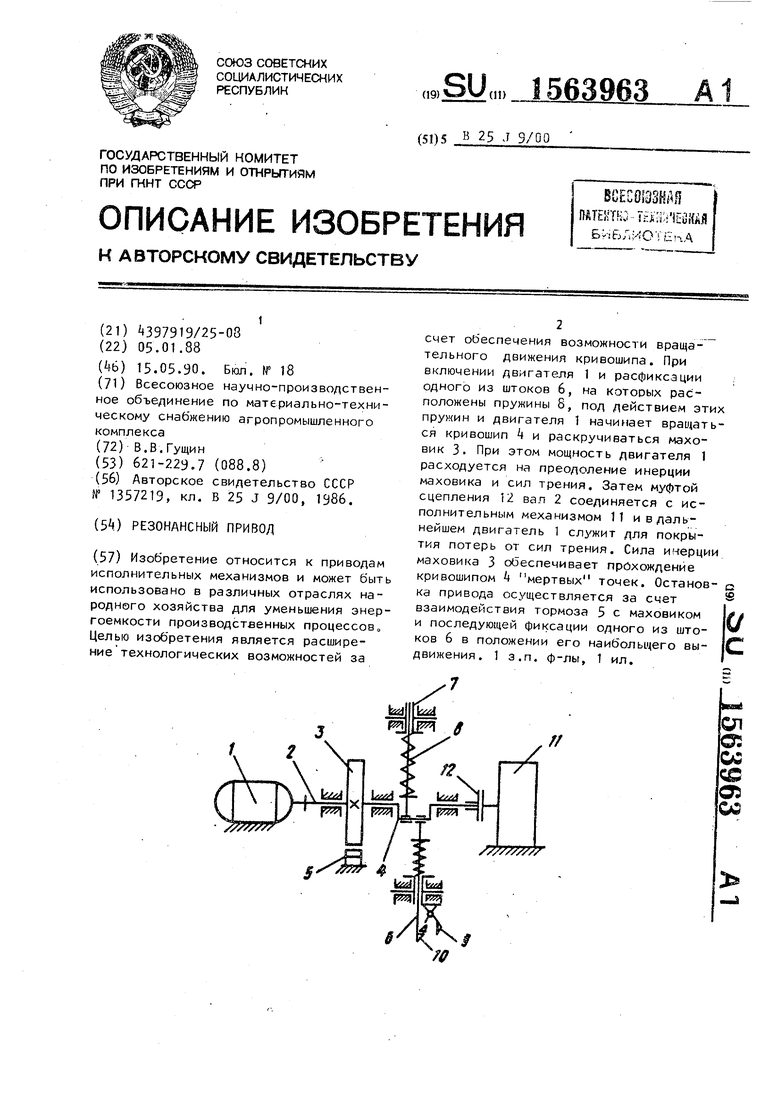
| Резонансный привод | 1986 |
|
SU1357219A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
