ния отсечки на выходе элемента 16 появляется логическая единица, резистор 48 отключается от выхода выпрямителя 1 и подключается на выход блока 18. В точке отсечки напряжение последнего равно Уз. При встрече рабочего органа 10с непреодолимым препятствием наступает режим стопорения, скорость гидроцилиндра равна
нулю, а давление возрастает, параметр регулирования Y и подача Q насоса уменьшатся. Процесс самонастройки продолжается до тех пор, пока напряжение на выходе блока 18 вновь станет равным задающему напряжению. 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система | 1989 |
|
SU1781467A1 |
| Электрогидравлическая система | 1989 |
|
SU1774072A1 |
| Электрогидравлическая система | 1989 |
|
SU1828956A1 |
| Адаптивный электрогидравлический привод экскаватора | 1989 |
|
SU1681036A1 |
| Устройство управления дуговой сваркой | 1987 |
|
SU1505705A1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1645659A1 |
| Пороговое устройство позиционного контроля терморезисторов | 1991 |
|
SU1791785A1 |
| Автоматически уравновешиваемый четырехплечий мост | 1983 |
|
SU1150554A1 |
| Стабилизированный преобразователь постоянного напряжения | 1980 |
|
SU954990A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1983 |
|
SU1089747A1 |
Изобретение относится к гидроавтоматике и может бцть использовано в приводах управления рабочими органами экскаваторов и дорожно-транспортных машин. Целью изобретения является расширение функциональных возможностей и повышение устойчивости. От задатчика на вход выпрямителя 1 поступает напряжение Uk , а на его выходе напряжение Уз пропорционально заданному значению подачи Оз и имеет полярность, соответствующую требуемому направлению движения гидроцилиндра 9. Если давление нагнетания в системе меньше давления отсечки, то сигналы на входах и выходе элемента ИЛИ 16 равны нулю и напряжение на выходе усилителя 2 пропорционально Ua, а подача Q насоса 5 пропорциональна параметру регулирования, у определяемому значением Уз, При превышении давлением нагнетания значе-(ЛсXJтшАь^ ю
Изобретение относится к гидроавтоматике и может быть использовано в приводах управления рабочими органами экскаваторов и дорожно-транспортных машин.
Целью изобретения является расширение функциональных возможностей и повышение устойчивости,
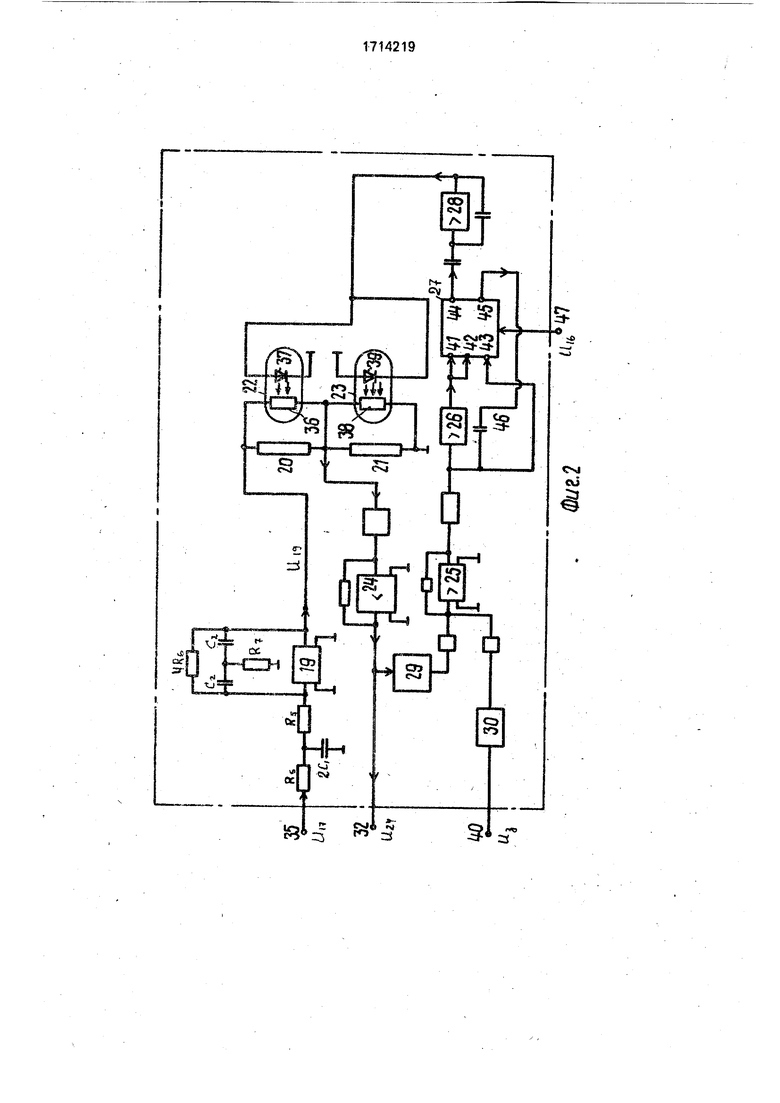
На фиг. 1 изображена схема электрогидравлической системы; на фиг. 2 - схема блока электронной модели; на фиг. 3 - области устойчивости системы в режиме стопореиия.
Злектрогидравлическая система содержит последовательно соединенные задатчик (не показан), фазочувствительный выпрямитель 1, первый суммирующий усилитель 2, электрогидравлический усилитель 3, гидравлический механизм 4 изменения подачи насоса 5, подключенного через гидролинии 6 и 7 и предохранительный клапан 8 к гидроципиндру 9, шток (не показан) которого соединен с рабочим органом 10, первое реле 11 давления, вход которого подключен к гидролинии 6, второе реле 12 давления, вход которого подключен к гидролинии 7, выход реле 11 давления через первь1й нелинейный элемент 13с зоной нечувствительности соединен с вторым входом первого суммирующего усилителя 2, выход реле 12 давления через второй нелинейный элемент 14 с зоной нечувствительности соединен с третьим входом усилителя 2. Кроме того, система содержит первый бесконтактный управляемый переключатель 15, логический элемент ИЛИ 16 с двумя входами, датчик 17 тока усилителя 3 и блок 18 электронной самонастраивающейся модели механизма 4 изменения подачи насоса 5.
Блок 18 (фиг. 2) включает колебательное звено второго порядка, например в виде операционного усилителя 19, резисторы 20 и 21, оптроны 22 и 23, масштабирующий усилитель 24, второй суммирующий усилитель 25, интегрирующий усилитель 26, второй бесконтактный управляемый переключатель 27, запоминающее устройство 28, первый блок 29 выделения модуля
и второй блок 30 выделения модуля. При этом первый информационный вход 31 первого бесконтактного переключателя 15 соединен с выходом фаэочувствительного выпрямителя 1, второй информационный вход 32 переключателя 15 подключен к выходу блока 18 электронной самонастраивающейся модели, пыходЗЗ переключателя 15 соединен с входом первого суммирующего усилителя 2.
Управляющий вход 34 переключателя 15 подключен к выходу логического элемента ИЛИ 16, первый и второй входы которого соединены с выходами первого и второго нелинейных элементов 13 и 14, выход датчика 17 тока подсоединен к входу операционного усилителя 19, воспроизводящего колебательное звено. Выход усилителя 19 соединен с последовательно включенными первым и вторым резисторами 20 и 21. Параллельно резистору 20 подключен фоторезистор 36 первого оптрона 22, фотодиод 37 которого соединен с вь1ходом запоминающего устройства 28. Параллельно резистору 21 подключен фоторезистор 38 второго оптрона 23, фотодиод 39 которого соединен с выходом запоминающего устройства 28. Вход масштабирующего усилителя 24 подключен к точке последовательного соединения резисторов 20 и 21. Выход усилителя 24, который является выходом блока 18 электронной модели, подсоединен к входу первого блока 29 выделения модуля, выход которого подключен к первому входу второго суммирующего усилителя 25. Второй вход усилителя 25 соединен с выходом второго блока 30 выделения модуля,вxoд 40 которого подключен к выходу фазочурствительного выпрямителя 1. Выход усилителя 25 соединен с входом интегрирующего усилителя 26, выход которого подключен к первому и второму информационным входам 41 и 42 второго бесконтактного переключателя 27, третт й информационный вход 43 которого соединен с суммирующим входом интегрирующего усилителя 26. Первый выход 44 переключателя 27 подключен к входу запоминающего устройства 28. Второй выход 45 переключателя 27 соединен с выводом конденсатора 46 в цепи обратной связи интегрирующего усилителя 26, а управляющий вход 47 переключателя 27 подсоединен к выходу логического эл емента ИЛИ 16. На входах усилителя 2 установлены резисторы 48-50 и 56. Электрогидравлическая система работает следующим образом. От задатчика на вход выпрямителя 1 поступает переменное напряжение Uk. Величина постоянного задающего напряжения на его выходе Уз пропорциональная заданному значению подачи Оз, а полярность напряжения Уз зависит от требуемого направления движения гидроцилиндра 9. При сигнале на управляющем входе 34 переключателя Логический нуль цепь 3133 является замкнутой, а цепь 32-33 разомкнута (фиг. 3). При сигнале на управляюа(ем входе 34 переключателя 15 Логическая единица цепь 31-33 является разомкнутой, а цепь 32-33 замкнута. При сигнале Логический нуль на управляющем входе 34 второго бесконтактного переключателя 27 (фиг. 4) его цепи 41-44 и 42-45 являются замкнутыми, а цепь 43-45 разомкнута. При сигнале на управляющем входе 34 этого переключателя Логическая единица цепи 41-44 и 42-45 являются разомкнутыми, а цепь 43-45 замкнута. На фиг. 5 приведена зависимость подачи Q насоса от давления, например, в гидролинии 6 высокого давления Рь и механическая характеристика, т.е1 зависимость ско рости Vn гидроцилиндра 9 от усилия РШ на штоке гидроцилиндра 9. Значения VR и РШ связаны со значениями Q и Рь равенствами;(1) РШ РВ АВ г ,(2) где АВ - рабочая площадь гидроцилиндра 9; ; - механический коэффициент полезного действия гидроцилиндра 9. На фиг. 5 и 6 обозначены: Роте, Роте давление и усилие отсечки, при которых эле ментами 13 и 14, реле 11 и 12 формируется отрицательн;ая обратная связь по давлению; РСТ. РСТ - значения давления и усилия стопорения; Ози, Vn3 - заданные значения подачи насоса 5 и скорости гидроцилиндра 9. Резисторы 48-51 имеют сопротивления , Ri. R2 и R3, цепи усилителя 19 имеют сопротивления Rs, Re и R/ и емкостиС1 и С2. Если в системе Рв Роте, то напряжения на выходах нелинейных элементов 13 и 14 равны нулю, т.е. равны нулю сигналы на обоих входах логического элемента ИЛИ 16. Поэтому сигнал на выходе элемента 16, поступающий на управляющие входы переключателей 16 и 27, будет Логический нуль. При этом сигнале на управляющем входе 34 цепь 31-33 пepekл Qчaтeля 15 замкнута. Через эту цепь резистор 48 усилителя 2 соединяется с выходом фазочувствительного выпрямителя 1. Следовательно, при Рв РОТС на резисторы 48 и 49 усилителя 2 поступает задающее напряжение Уз. а напряжения на резисторах 50 и 51 этого усилителя равны нулю. Поэтому напряжение на выходе усилителя 2 при Рв РОТС пропорционально задающему напряжению Оз. Напряжение Уэм прступает на усилитель 3, на выходе которого устанавливается давление управ/Уения -Ру, пропорциональное напряжению Уэм. Давление управления Ру воздействует на механизм 4 изменения подачи, который обеспечивает значение параметра регулирования у насоса 5, пропорциональное давлению Ру. Подача Q насоса 5 изменяется пропорционально значению параметра регулирования у . Таким образом, при Рв Роте устанавливается заданное значение подачи Оз и соответствующая этой подаче заданная скорость V3 перемещения штока гидроцилиндра 9, пропорциональные задающему напряжению Уз на выходе фазочувствительного выпрямителя 1. На вход 35 усилителя 19 блока 18 самонастраивающейся электронной модели поступает напряжение У i с выхода датчика 17 тока, пропорциональное давлению управления Ру на выходе усилителя 3: ,(3) где KI - коэффициент пропорциональности. Гидравлический механизм 4 изменения подачи насоса 5 имеет передаточную функциюУ(РУ Ру(Р) Р TIH Т2Н + РTiH-Ы где кдн - коэффициент передачи; TiH, Т2и постоянные времени; у - параметр регулирования насоса 5. Подача Q пропорциональна параметру регулирования Q К2 . 7(5) де К2 - коэффициент пропорциональности. С учетом равенства (5) передаточная ункция (4) принимает вид Q ( P ) Кдн Py(P) P TIH T2H + P TlH + 1 где коэффициент передачи Кдн определяется равенством Kд„ кV К2.(7) Передаточной функции (б) соответствует колебательное звено второго порядка, поскольку имеет место неравенство TiH 4Т2н, при котором корни характеристического уравнения Р Т1нТ2н + PT1H + 1 О(8) являются комплексно-сопряженными. Операционный усилитель 19 блока 18 имеет передаточную функцию U19(P)-.. U17(P} Р R6 R С§ + Р R С2 + 1 Емкость Ci ВО ВХОДНОЙ цепи усилителя 19 необходима для подавления высокочастотных помех и не оказывает влияния на передаточную функцию (7). Из сопоставления уравнений (6) и (9) с учетом равенства (3) определяются зависимости для расчета значений сопротивлений , RS, Re. R и емкости Са операционного усилителя 19, при которых соблюдаются критерии подобия переходных процессов в реальном объекте, имеющем передаточную функцию (б), и электронной модели, имеющей передаточную функцию (9), а также обеспечивается пропорциональность между напряжением Ui9 на выходе усилителя 19 и подачей насоса 5: Ui9 K2Q:(10) 2R6 К2Кдн R7C2- TiH,(12) ВбС2 Т2н, .(13) где К2 - коэффициент пропорциональности. При выполнении равенств (11) -{13) напряжение Ui9 на выходе операционного усилителя 19 в переходных и в установившихся режимах работы привода пропорционально текущему значению подачи Q. Напряжение Uig поступает на вход усилителя 24 в результате деления напряжения с автоматически перестраиваемым коэффициентом деления, осуществляемого резисторами 20 и 21 и оптронами 22 и 23. Выход 32 Масштабирующего усилителя 24 является выходом блока 18 электронной модели гидравлического механизма изменения подачи насоса; напряжение U24 на выходе усилителя 24 пропорционально текущему значению подачи Q: U24-K3Q,(14) где Кз - козффициент пропорциональности. При давлениях Рв Роте напряжение Оэм на выходе усилителя 2 с сопротивлением RO зависит только от задающего напряжения из и определяется уравнением изм-из (15) При превышении давлением Рв значения давления отсечки Роте, т.е. в области РВ РОТС, появляется напряжение на выходе одного из нелинейных элементов - 13 либо 14, которое поступает на один из входов логического элемента ИЛИ 16, и на выходе элемента ИЛИ 16 появляется сигнал Логическая единица. Под влиянием этого сигнала в переключателе 15 размыкается цепь 31-33 и замыкается цепь 32-33, т.е. резистор 48 отключается от задающего напряжения Уз и подключается на выходное напряжение U24 блока 18, которое пропорционально текущему значению подачи Q. Полярность напряжения U24 совпадает с полярностью напряжения Уз. В точке отсечки механической характеристики напряжения Uaw на выходе усилителя 2 (после описанных выше переключений цепей 31-33 и 32-33) определяется уравнением из RO L U24 RO,,,,. R1 R4 В точке осечки напряжение U24 пропорционально заданной подаче Оз, т.е. Оз.(17) Коэффициент усиления усилителя 24 блока 18 подбирается таким образом, чтобы в точке отсечки напряжение U24 на выходе блока 18 было равно задающему напряжению Уз. В этом случае в момент размыкания цепи 31-33 и замыкания цепи 32-33 переключателя 15 напряжение Уэм на выходе усилителя 2 сохраняет неизменное значение, что исключает появление в системе управления каких-либо возмущений в момент переключения переключателя 15. Уравнение (16) можно представить а виде Уэм Уэм1 + Уэм2. где Уэм1 Уз часть напряжения Уэм. которая создается р точке отсечки задающим напряжением Уз: Уэм2 У24 - часть напряжеR4 R4 ния Уэм, которая создается в точке отсечки н1апряжением У24 положительной обратной связи по подаче Q на входе 32 переключателя 15 и входе блока 29 выделения модуля. Поскольку в точке отсечки напряжение У24 Уз, относительные значения напряжения Уэм1 и Узм2 в точке отсечки определяются коэффициентами пит:
R4
Уэм1
(18)
п
RI 4-R4
Уэм
RI иэм2
(19)
m
RI +R4
Уэм (20)
причем п 1-т.
Повышение коэффициента усиления положительной обратной связи по подаче Q осуществляется уменьшением сопротивления R4 резистора 48 на входе усилителя 2. Одновременно с этим необходимо снижать коэффициент усиления для цепи задающего напряжения Ua. т.е. увеличивать сопротивление RI на входе усилителя 2.
При отключенной положительной обратной связи по подаче Q сопротивление RI имеет минимальное значение RI RIMMH, а сопротивление R4 , при этом m 0; h
При введенной положительной обратной связи по подаче Q соблюдается соотношение
- yij RiMHH const. (21) откуда с учетом (18) и (19) получаем
(22)
RI Rimin - (23) RI RiMHH -.
Коэффициент m по уравнению (19) определяет относительное влияние контура положительной обратной связи по подаче на подачу Q в точке отсечки механической характеристики.
По мере роста этого влияния коэффициента m увеличивается, а коэффициент п уменьшается согласно уравнению (20).
При встрече рабочего органа 10с непреодолимым препятствием, что характерно, например, для копающих механизмов экскаваторов, наступает режим стопорения. В этом режиме скорость Vn гидроцилиндра 9 становится равной нулю, продолжающая поступать от насоса 5 рабочая жидкость сжимается, давление Рв возрастает согласно уравнению
dPe r Сгэ
(24)
Q
А&
dt
где Сгэ - эквивалентная жесткость.
.. (25)
Е - обьемный модуль упругости жидкости;
V Ж - .объем жидкости в гидролиний 6 высокого давления.
При давлении в гидролинии 6 Рв Роте появляется напряжение на выходе нелинейного элемента 13.
Ul3 Kll(PB-Porc).(26)
где Kii - коэффициент передачи реле 11 давления;
KiPoTc - ширина зоны нечувствительности нелинейного элемента 13.
Полярность напряжения Uis противоположна полярности напряжений Уз и и24.При РВ РОТС напряжение Уэм на выходе усилителя 2 определяется уравнением
0
RC
-(Рв-Ротс)К1-(27)
иэм из
По мере роста давления Рв напряжение Уэм уменьшается, что вызывает снижение давления управления Ру, параметра регу/1ирования у и подачи Q.
Электрогидравлический усилитель 3
имеет передаточную функцию
Ру(Р) Кдуп
(29) иэм(Р) PTL+I
где TL и Кдуп - электромагнитная постоянная времени и коэффициент передачи усилителя 3.
В результате совместного решения уравнений (6), (24). (27) и (28) передаточная функция в режиме стопорения имеет вид:
34 + Р аз + Р аа + Р(1-т) + ао
(29)
где гэ-эквивалентная гидравлическая постоянная системы. а4 TL Т1нТ2н: аз TiH (TL + Т2н):
a2 TL + TlH;
m - коэффициент по уравнению (19). при
этом;
1
(30)
ао
0
и -
1
А (31) -Т1с
К Р2 С гэ
где К Р2 коэффициент усиления отрицательной обратной связи по давлению Рв.
5 ,,„ ....„Клн.(32)
II-p-NAynNflH.
Согласно физическому смыслу уравнения (32). коэффициент усиления Кр2 равен
отношению сигналов на выходе и на входе 0 разомкнутой по давлению РВ системы.
В точке стопорения Рв Рст, т.е. входной сигнал равен (РСТ - РОТС). а соответствующий ему выходной сигнал равен
Озп УлзАвп. 5 т.е.
V3 АВ п
(33)
КР2
РСТ - РОТС
с учетом равенства (33) выражение (31) принимает вид;
аАВ PC
отс
(34)
гэ -
Vnsn Сгэ
в точке стопорения давление Рв Рст, при этом подача Q О, т.е. равны нулю напряжения Уэм и U24 уравнения (27).
Обычно давление стопорения Рст поддерживается ца неизменном максимально допустимом уровне, а значение коэффициента отсечки Котс(1)/регулируется изменением давления отсечки Роте.
После подстановки в уравнение (27) значений РВ U24 О получаем зависимость давления Роте от задающего напряжения Уз и коэффициента п:
Ротс Рст-из-тттт : (35)
Кц R 1 мин
т.с,
Нз
Роте 1 из
Ксис
Рст
„-- Е: I -
РСТ Кц R 1 мин
Из уравнений (35) и (36) следует, что для поддержания неизменного значения давления стопорения РСТ при неизменном коэффициенте усиления К Р2 (31), т.е. постоянных значениях Кп и Кз, необходимо по мере снижения коэффициента п увеличивать усилие отсечки Роте, т.е. увеличивать коэффициент отсечки Коте. Снижению коэффициента п соответствует усиление положительной обратной связи по подаче, т.е. увеличение коэффициента т, поскольку со1 ласно уравнению (20) п 1-т.
Передаточной функции (29)соответствует характеристичеокое уравнение
PS + + + Р(1- т) + ао 0.
Устойчивый характер переходных процессов согласно критерию Гурвица обеспечивается при условии
-
- 3-2 аз ( 1 -т ) (1
(37)
ао -9
аз
или с учетом, равенства (34), при Сгэ п УОТС
(38)
Когс 1 АВ
РСТ астр
где аогр - граничное значение коэффициента ао по уравнению (37).
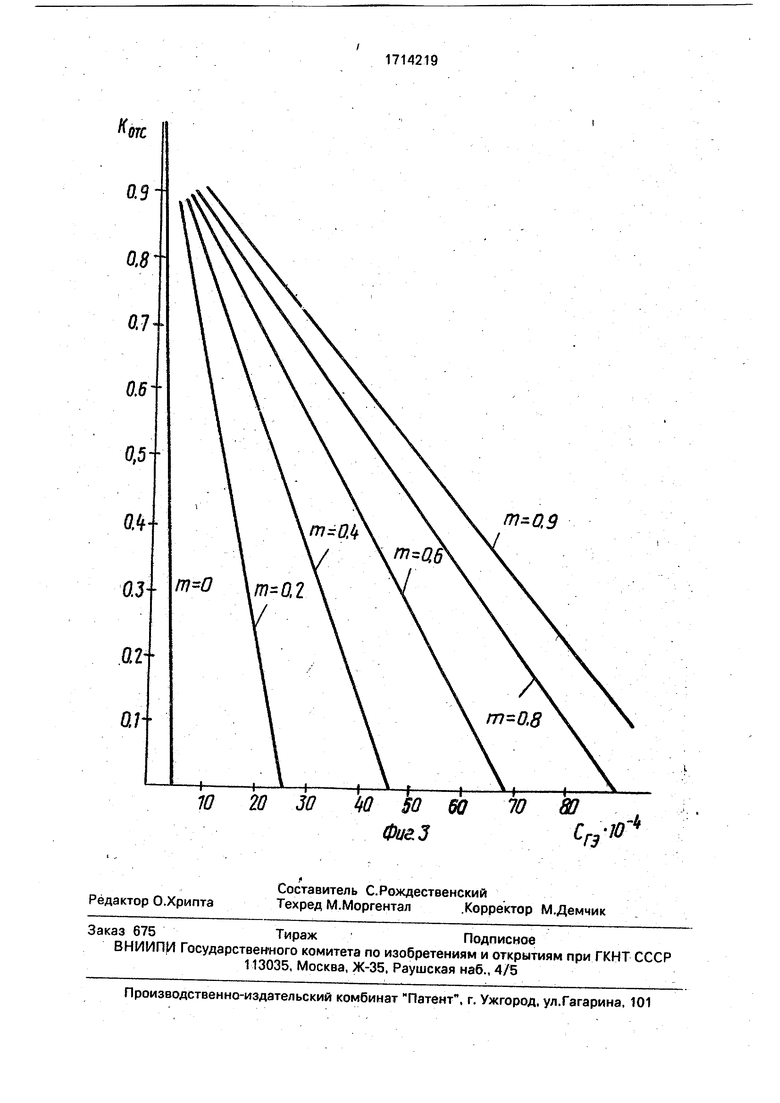
На фиг. 7 приведены границы области устойчивости в режиме стопорения, рассчитанные по уравнениям (37) и (38) для привода подъема стрелы карьерного гидравлического экскаватора.
Границы области устойчивости представлены в виде зависимости критического значения коэффициента отсечки Коте от эквивалентной жесткости гидравлической пружины Сгэ при различных значениях коэффициента m по равенству (19).
По мере увеличения коэффициента m по уравнению (19), т.е. по мере повышения относительного влиямия на подачу насоса 5 в точке отсечки механической характеристики положительной обратной связи по подаче насоса 5, обеспечивается существенное увеличение критического значения коэффициента отсечки Коте, т.е. повышение даёления отсечки Роте при неизменной величине давления Рст.
Вместе с тем при каждом значении коэффициента Коте имеет место значительное увеличение критического значения эквивалентной жесткости Сгэ, т.е. обеспечивается существенное повышение запаса устойчивости замкнутой системы автоматического регулирования.
При давлениях Рв Роте, когда сигнал
на управляющем входе 47 переключателя 27 Логический нуль, замкнуты цепи 41-44 и 42-45 этого переключателя. На входы суммирующего усилителя 25 поступает разность модулей напряжения U24 с выхода
блока 18 электронной модели и задающего напряжения Уз.
Когда эти два напряжения равны, то напряжение на выходе усилителя 25 равно нулю, следовательно, равны нулю и
напряжения на йходе и выходе интегрирующего усилителя 26, а также на входе и выходе запоминающего устройства 28. При этом ток в светодиодах 37 и 39 оптронов 22 и 23 равен нулю, т.е. сопротивления фоторезисторов 36 и 38 весьма велики и не оказывают влияния на коэффициент деления делителя напряжения, состоящего из резисторов 20 и 21. Если же по любой из возмбжных причин равенство напряжений U24 и из (при давлеНИИ РВ Роте) нарушается, это вызывает появление на выходе усилителя 25 напряжения, полярность которого зависит от знака разности модулей напряжений U24 и из:
AU /U24/-/U3/(39)
Напряжение на выходе усилителя 25, пропорциональное напряжению Ди, поступает на вход интегрирующего усилителя 26. Напряжение выхода усилителя 26 через
цепь 41-44 переключателя 27 подается на вход запоминающего устройства 28, которое при замкнутой цепи 41-44 работает в режиме слежени, т.е. на выходе устройства 28 имеется напряжение, равное выходному
напряжению усилителя 26. Схема включения светодиодов 37 и 39 согласована с полярностью выходного напряжения усилителя 26 таким образом, что при соотношении /U24/ /из/ протекает ток в светодиоде 37 оптрона 22, а светодиод 39 оптрона 23 включен в обратном непроводящем направлении.
По мере роста тока светодиода 37 уменьшается сопротивление фоторезистоpa 36, что обеспечивает увеличение напряжения на входе усилителя 24, т.е. увеличение его выходного напряжения 1)24. Описанный процесс самонастройки продолжается до тех пор, пока напряжение U24 не станет равным задающему напряжению из.
Аналогично осуществляется самонастройка блока 18 при соотношении /U24/ /из/. В этом случае полярность напряжения на выходе усилителя 25 изменяется на обратную, соответственно, изменяется и полярность напряжения на выходе усилителя 26, поступающего через цзпь 41-44 на вход запоминающего устройства 28, оаботающего в режиме слежения. Полярность напряжения на выходе устройства 28 npvi этом такова, что фотодиод 39 включен в прямом проводящем направлении, а фотодиод 37 заперт.
По мере увеличения тока в цепи фотодиода 39 уменьшается сопротивление фоторезистора 38, что вь1зывает уменьшение напряжения на входе усилителя 24 и соответствующее снижение напряжения U24. Процесс самонастройки, продолжается до тех пор. пока напряжение U24 не станет равным напряжению Us.
Таким образом, при давлении Рв Роте обеспечивается- самонастройка блока 18 электронной модели, обеспечивающая равенство его выходного,напряжения U24 задающему напряжению Уз.
При повышении давления Рв до значеНИИ РВ РОТС на управляющем входе 47 переключателя 27 появляется сигнал Логическая единица, что вызывает размыкание цепей 41-44 и 42-45 переключателя 27, а также замыкание цепи 43-45 этого переключателя. После размыкания цепи 41-44 запоминающее устройство 28 переходит в режим запоминания, продолжая поддерживать ток светодиода 37 (либо 39) равным тому, при котором было дрстигнуто в процессе самонастройки равенство напряжения U2 (при РЗ РОТС) напряжению Мз- После размыкания цепи 42-45 и замыкания цепи 43-45 конденсатор 46 усилителя 26 отключается от выходного напряжения этого усилителя и замыкается накоротко, что вызывает его разряд. Благодаря разряду конденсатора 46 осуществи иется подготовка блока 18 к следующему циклу его работы, который наступает после снижения давления Рв до значений Рв РОТС.
Фор мул а изобретения
Электрогидравлическая система, содержащая последовательно соединенные задатчик, первый суммирующий усилитель.
электрогидравлический усилитель и механизм изменения подачи регулируемого насоса, связанн.ого гидролиниями с гидроцилиндром, шток которого соединен с рабочим органом, а также два реле давления, подключенных к гидролиниям и связанных каждое через один нелинейный элемент с зоной нечувствительности с суммирующим усилителем, и блок электронной модели механизма изменения подачи, один вход которой соединен с датчиком тока электрогидравлического усилителя, отличающаяс я тем, что, с целью расширения функциональных возможностей и повышения устойчивости, она снабжена первым бесконтактным управляемым переключателем и логическим элементом ИЛИ, входы которого соединены с нелинейными элементами с зоной нечувствительности, а выход - с управляющим входом первого бесконтактного управляемого переключателя, информационные входы которого связаны с задатчиком и блоком электронной модели, выполненным в виде колебательного звена второго порядка, двух резисторов, двух оптронов, масштабирующего усилителя, второго суммирующего усилителя, интегрирующего усилителя, второго бесконтактного управляемого переключателя, запоминающего устройства и двух блоков выделения модуля, при этом датчик тока электрогидравлического усилителя подключен к входу колебательного звена второго порядка,выход которого связан с последовательно соединенными резисторами, параллельно каждому резистору включен фоторезистор одного из оптронов, фотодиоды которых соединены с выходом запоминающего устройства, вход масштабирующего усилителя подключен к точке последовательного соединения резисторов, а выход-к информационному входу первого бесконтактного управляемого переключателя и к входу первого блока выделения модуля, выход которого подключен к одному входу второго суммирующего убилителя, другой вход последнего соединен с выходом второго блока выделения модуля, вход которого связан с задатчиком, выход второго суммирующего усилителя соединен с входом интегрирующего усилителя, а его выход подключен к двум информационным входам второго бесконтактного управляемого переключателя, третий информационный вход которого соединен с суммирующим входом интегрирующего усилителя, управляющий вход - с выходом логического элемента ИЛ И, а выходы - с цепью обратной связи интегрирующего усилителя и входом запоминающего устройства.
13 3
| Электрогидравлический привод | 1989 |
|
SU1629634A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
