Изобретение относится к средствам коррекции систем управления, может быть использовано в быстродействующих системак позиционирования станков с программным управлением, .роботов-манипуляторов, высокоточных следящих установок и т.д/и является усовершенствованием устройства по основному авт. ев, № 1126925.
Цель изобретения - повьшение надежности и уменьшение энергоемкости устройства.
На фиг, 1 представлена блок-схема устройства на фиг, 2 - эпюра напряжения, характеризующая работу устройства; на фиг, 3 - временные характеристики сигналов устройстваJ на фиг, 4 - принципиальная электрическая схема пикового детектора; на фиг, 5 -- принципиальная электрическая схема блока памяти.
Устройство содерлдат измеритель 1 рассогласования, блок 2 умножения, суммирующее устройство 3, исполнительный двигатель 4 с нагрузкой, датчик 5 скорости, нелинейное корректирующее устройство б, пиковый детектор 7, первьй ма.сштабирую1 Д1й блок 8, первый су.мматор 9, сигнум- реле 10, первьй переключатель 11, второй масштабирующий блок 12, второй сумматор 13, второй переключатель 14, источник 15 постоянного напряжения, нуль-орган 16, усилитель 17, третий сумматор 18, блок 19 памяти, компаратор 20, ключ 21, релейный блок 22, первьй и второй входы 23 и 24 и первьй и второй выходы 25 и 26 нелинейного корректирую.ш,его устройства 6, резисторы 27-30, опе рационньй усилитель 31, конденсаторы 32 и 33, диод 34, транзистор 35, оптрон 36, общую шину 37, оптроны 38 и 39, операционные усилитепи 40 и 41, резисторы 42 и 43, диоды 44 и 45, конденсатор 46, . обозначает сигнал на выходе i-ro блока,
В состав нелинейного коррек тирую щего блока 6 входят пиковьй детектор 7, п-ервьм масштабирующий блок 8, первьй cy iмaтop 9, сигнум-:Е еле 10 первьй переключатель 11, второй масштабирующий блок 12, второй матор 13, второй переключатель 14, источник 15 постоянного напряркения, нуль-орган 16, усилитель 17, третий суммйтор 18, блок 19 памяти, компаратор 20, ключ 21, релейньй блок 22,
В состав пикового детектора 7 входят резисторы 27-30,операционньй- усилитель 31, конденсаторы 32 и 33, диод 34, транзистор 35, оптрон 36,
общая шина 37,
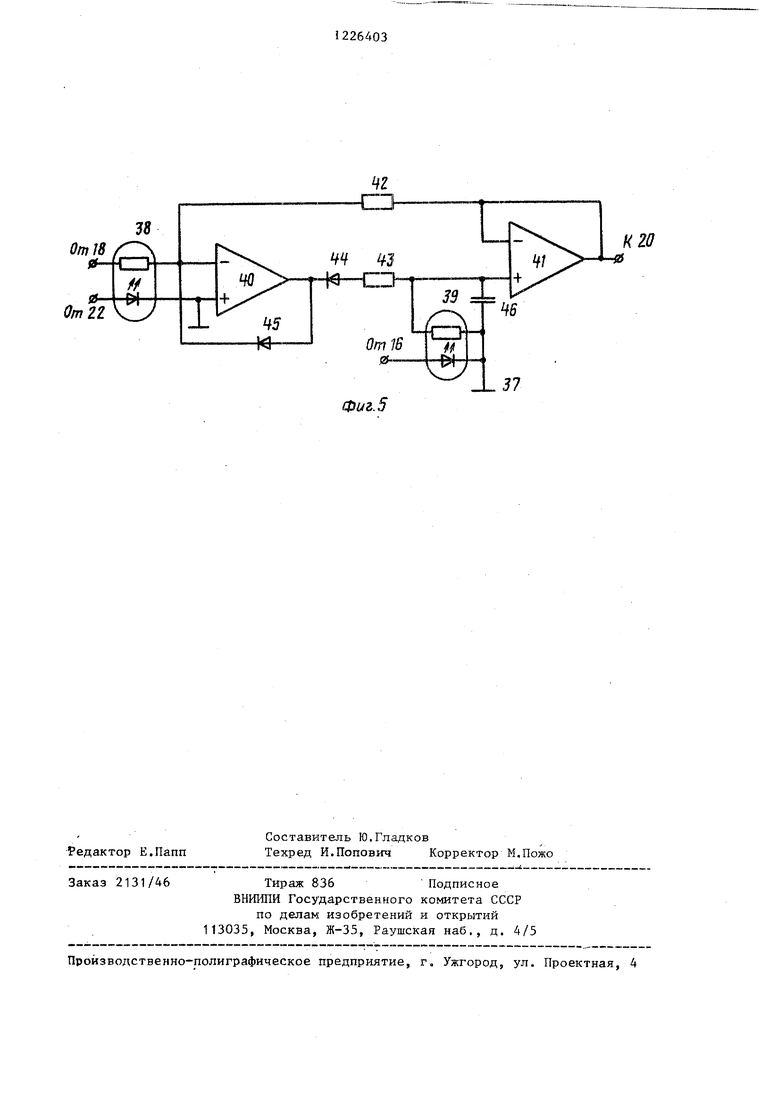
В состав блока 19 памяти входят оптроны 38 и 39, операционные усш7и Т1ВЛИ 40 и 41, резисторы 42 и 43, дио ды 44 и 45, конденсатор 46 и общая
шина 37.
Пиковый детектор 7 (фиг, 4) позволяет выделить максимальное значение сигнала рассогласования. При уменьшении сигнала рассогласования
диод 34 закрывается и конденсатор 33 хранит максимальное значение напряжения до появления сигнала Сброс от нуль-органа 16, которьй, воздействуя на оптрон 36, уменьшает сопротивление его фоторезистора и тем самым создает цепь разряда емкости конденсатора 33, Каскад на транзисторе 35 уменьшает влияние последующих каска- дов на работу пикового детектора .7,
Блок 19 памяти (фиг, 5) представляет собой разновидность пикового детектора с дополнительными переклю- чаюдщми элементами на оптронах 38 и 39 Согласно приведенному ниже
описанию алгоритма работы всего устройства сигнал от третьего сумматора 18 подается в блок 19 памяти через фоторезистор оптрона 38, которьй управляется выходным сигналом
релейного блока 22, Оптрон 39 служит для создания цепи разряда запоминающего конденсатора 46 во время появления сигнала с нуль-органа 16,
В качестве компаратора 20 можно
применить устройство сравнения на операционном усилителе, в качестве ключа 21 - транзисторньй управляемьй 1ШЮЧ, в качестве релейного блока 22 с зоной нечувствительности - транзисторное репе. Выбор коз зфициента передачи К первого масштабирующего блока 8 равным 0,5 обеспечивает необходимое положение линии переключения с релдама разгона на режим торможения в случае треугольного профиля скорости, а выбор величины коэффициента передачи К 1/К (где К -3.20) второго масштабирующего блока 12 обуславливает переход в линейньй установивщийся режим после окончания пефеходного процесса при под- ходе к точке позиционирования,. Величина зоны нечувствительности релейкого блока 22 выбирается в соответствии с величиной насыщения скорости двигателя 4, т.е. при скоростях, меньших максимально возможной скорости (скорости насьпцения), сигнал U,j на выходе лэелейного блока 22 отсутствует (U 0).
Работу нелинейного корректирующего устройства 6 в состав системы автоматического регулирования рассмотрим для двух случаев: при треугольном и трапецеидальном профилях диаграммы скорости исполнительного двигателя 4.
Б первом случае насыщения скорости вращения двигателя 4 не .происходит и ключ 21 остается все время в замкнутом состоянии, так как на его первый управляющий вход не подается размыкающий сигнал U,, с выхода релейного блока 22. Поэтому в этом случае система работает как известное устройство и характеризуется тремя режимами: режимом разгона при и j ,5и(7,режимом торможения при , бО,5и и режимом апериодического- движения к точке позиционирования при ,UUv/l где и - сигнал рассогласования на выходе измерителя, рассогласования 1i и - экстремальное значение сигнала рассогласования, зафиксированное пиковым детектором 7, К 20.
Корректирующее устройство 6 обеспечивает разгон и торможение двигателя в первых двух режимах с максимально возможным ускорением а,.
Во втором случае, начиная с некоторого момента времени t, (фиг.З) двигатель 4 достигает максимально возможной скорости uJ и продолжает работать в режиме насыщения. До момента t . устройство 6. работает так же, как и в режиме разгона дпя первого случая, .а в момент t, напряжение U с датчик а скорости 5 превышает зону нечувствительности релейного блока 22 и на его выходе появляется сигнал Uj,j , которьй поступает на первьй управляющий вход и вызьшает его размыкание. При этом сигнал И на выходе первого переключателя становится равным нулю, а сигнал с выхода источника 15 постоянного напряжения, пройдя через второй переключатель 14 и усилитель 17, перемножается в блоке 2 умножения на сигнал , имеющий вид
0
5
0
5
0
5
постоянного по величине напряжения. Сигнал Uj на выходе суммирующего устройства 3 постоянен по величине и является таким, что обеспечивает движение двигателя 4 в режиме насыщения (фиг. 2 и 3).
В момент t сигнал U подается не только на размыкающий вход ключа 21, но и на второй управляющий вход блока 19 памяти. В результате последний фиксирует текущую величину подаваемого на него напряжения с выхода третьего сумматора 18, формирует на своем выходе сигнал U-,j, и хранит его до прихода сигнала U на второй управляющий вход с выхода нуль-органа 16. В компараторе 20 . сигнал сравнивается с сигналом рассогласования U и в момент времени tj, когда выполняется условие lUj U,jl на выходе компаратора 20 появляется сигнал U , которьй подается на второй управляющий вход ключа 21 и вызывает его замыкание. .При этом отрицательньй ступенчатый сигнал с выхода сигнум-реле 10, проходя через ключ 21 и первьй переключатель 11, подается на вход суммирующего устройства 3, В, результате этого управляющее воздействие U на выходе суммирующего устройства 3 имеет вид, обеспечивающий оптимальное торможерше исполнительного двигателя 4 (фиг. 2 и 3). Далее система работает как известная и при подходе к точке позиционирования (I и I 4 ) переключатели 11, и 14 пропускают па свои выходы сигнал Uy ,. создавая апериодическое движение в установившемся режиме.
Рассмотрим поведение системы регулирования в случае отработки трапецеидального профиля скорости исполнительным двигателем 4, имеющим передаточную функцию следующего вида:
w.(p) Ь(1)
К,
р(р
ГТ)
Р(и,05Р + 1) где W,,(P), К, Т, (1)
соответственно, передаточная функция, коэффи- lyieHT усиления и постоянная времени исполнительного двигателя 4 с нагрузкой на валу.
Дифференциальное уравнение, описывающее поведение системы с учетом выражения (1), принимает вид
т,и + и, .
(2)
Значение сигнала U определяется ежимом работы
+U,o при разгоне О t t , . (3) const при насыщении Ц. 6- t (4) -и,„ при торможе- нуи t tj 5 (5) Uj U, и,, при позшщони- ровании I U,U , (6)
где - величина сигнала на вькоде источника 15 постоянного напряжения,, 20 K|j - произведение коэффициента передачи усилителя 17 и датчика 5 скорости, и,Р - величина ступенчатого сигнала на выходе сигнум-ре 25 ле 10, К - 20.
Если выполнить условие 1/К и подставить уравнение (3) - (6) в выражение (2), получают ЗО
Т и„ Kj, при О t $tf , (7)
и, О, и„. - и, К, ,
const при t t tj 5(8)
-КцУл при t t, ,(9)
+ (1 35
K.u при u, , (10)
Уравнения (7) и (9) описывают, соответственно, разгон и тормол ение с максимальным ускорением | UJ о К,и,„ /1.
Уравнению (8) соответствует режим движения с постоянной максимальной скоростью uJ| (режим насыщения) .
45 Уравнение (10) описывает режим
вблизи точки позиционирования, когда кинетическая энергия погашена, предьщущим режимом торможения и система переходит в апериод1-гческий гп установившийся режим работы, обеспечивающий требуемую точность пози- ;ционирования.
На фиг. 2 и 3 p,nfi передаточной ) (1} построены характеристики . ри следующих численных значениях
параметров: максимальное уск.орение а,, 4000 рад/с 5 максимальная скорость сО,, 10 рад/с, величина ступенчатого задающего воздействия go и, 1 рад, коэффициент передачи второго масштабирующего блока К 50, Для этих исходных данных получают Uio 0,4 В; Uj 05 2В const:,, t, ,,, 0,025с; t,.,
gp/oJ ОJ с.
Таким образом, использование новых элементов - третьего сумматора, блока памяти, компаратора, релейного блока с зоной нечувствительности и ключа, выгодно отличает предлагаемое техническое решение от известного, так как позволяет обеспечить оптим:альное быстродействие как при треугольном,, так и при трапецеидальном профиле диаграммы скоростей. В результате этого повышается надежность устройства и происходит- эконо- 1ЧИЯ энергии тем большая, чем длин- нее з часток движения со скоростью насьш(ения. При этом потребление энергии может уменьшиться на 40-50% а над;ежность может повыситься на 100%.
Форм у,л а изобретения
Нелинейное корректирующее устройство по авт. св. № 1126925, отличающееся тем, что, с целью повьш1ения надежности и уменьшения энергоемкости устройства, в нем дополнительно установлены третий сумматор, блок памяти, компаратор, релейный блок и ключ, причем выход сигнум-реле соединен с вторым информационным входом первого переключателя через ключ, соединенный первым управляющим входом с выходом релейного блока и первым управляющим входом блока памяти, вторым управляю- входом - с выходом компаратора, подключенного первым входом к входу нуль-органа и к первому входу третьего сумматора, вторым входом - к выходу блока памяти, соединенного вторым управляющим входом с выходом нуль-органа, а информационным входом - с выходом третьего сумматора, подключенного вторым входом к выходу пикового детектора.
0.6 О.Ч
о,г
0.95
0,02
7
I
HaSO.Z 0,4 0,6 0,80,8751.0 U,/(Jj Q25.
0,2
0,JZ5 0
Фаг.2
29
QmZ3 2.1
Фиг.1 w
0,875- 0,8
U,Us
0,6
(if f
0,JZ5 0
t,0,OZ5ctt O.k tn 0,}Z$C
Фиг.З
,JZJ8
37
ФигМ
ЧЦ 3
OmZZ
m
СП
KW
Фиг,. 5
Редактор Е.Папп
Составитель Ю.Гладков
Техред И.Попович Корректор М.Пожо
Заказ 2131/46
Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
JL.37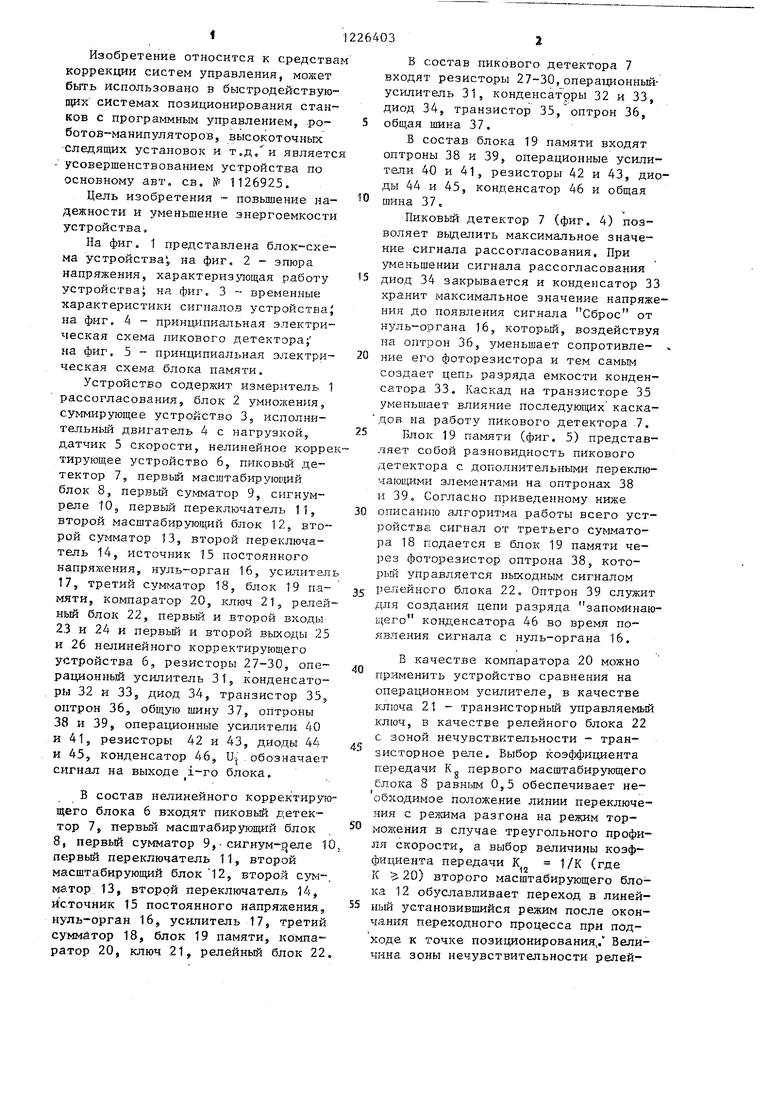
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022312C1 |
| Регулятор | 1989 |
|
SU1789969A1 |
| Нелинейное устройство фазовой коррекции | 1984 |
|
SU1233097A2 |
Изобретение относится к области средств коррекции .систем управления, может быть использовано в быстродействующих системах позиционирования станков с программным управлением, работах-манипуляторах и высокоточных мерящих установках. В устройстве решается задача уменьшения его энергоемкости. В этом устройстве входной сигнал поступает на первый информационньм вход первого переключателя, а через последовательно соединённые пиковый детектор, первый масштабирующий блок, первьй сумматор, сигнум-реле и ключ - на второй информационный вход первого переключателя. Кроме того, входной сигнал поступает на второй вход первого сумматора, на вход нуль-органа и первьй информационный вход второго переключателя, на второй вход которого поступает выходной сигнал источника постоянного сигнала. Выходной сигнал .пикового детектора через второй масштабирующий блок поступает на вход второго сумматора, где суммируется с входным сигналом, а результат суммирования является управляющим сигналом для первого и второго переключателей.- Выходной сигнал пикового детектора поступает на вход третьего сумматора, где суммируется с входным сигналом, а результат сум шрования поступает на информационный вход блока памяти. Выходной сигнал нуль-органа является управляющим сигналом для пикового детек- тора и первым управляю у1м входом для блока записи. Выходной сигнал релейного блока является вторым управляю-, щим сигналом ,чля блока памяти и первым управляющим сигналом для ключа, Выходной сигнал блока памяти сравнивается с входным сигналом в компараторе, выходной сигнал которого является вторым управляющим сигналом второго ключа. Выходной сигнал первого переключателя является первым выходным сигналом устройства. Выходной сигнал второго устройства че рез усилитель поступает на второй выход устройства. Входным сигналом устройства является сигнал рассогласования системы. Кроме того, вход релейного блока подключен к выходу датчика скорости системы, В устройстве на основании информации и сигналах рассогласования и скоростной обратной связи осуществляется переключение скоростной обратной связи. 5 ил. Дополнительное к авт. св.№1126925, i (Л С Is3 1чЭ О 00
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
