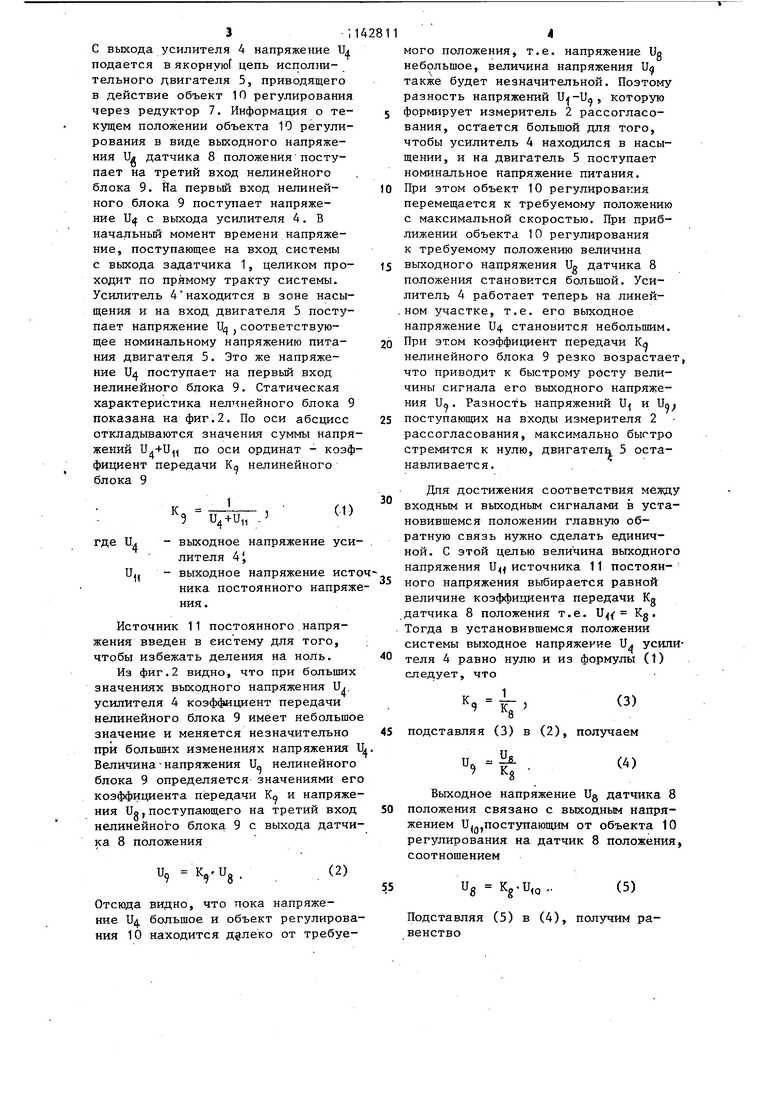
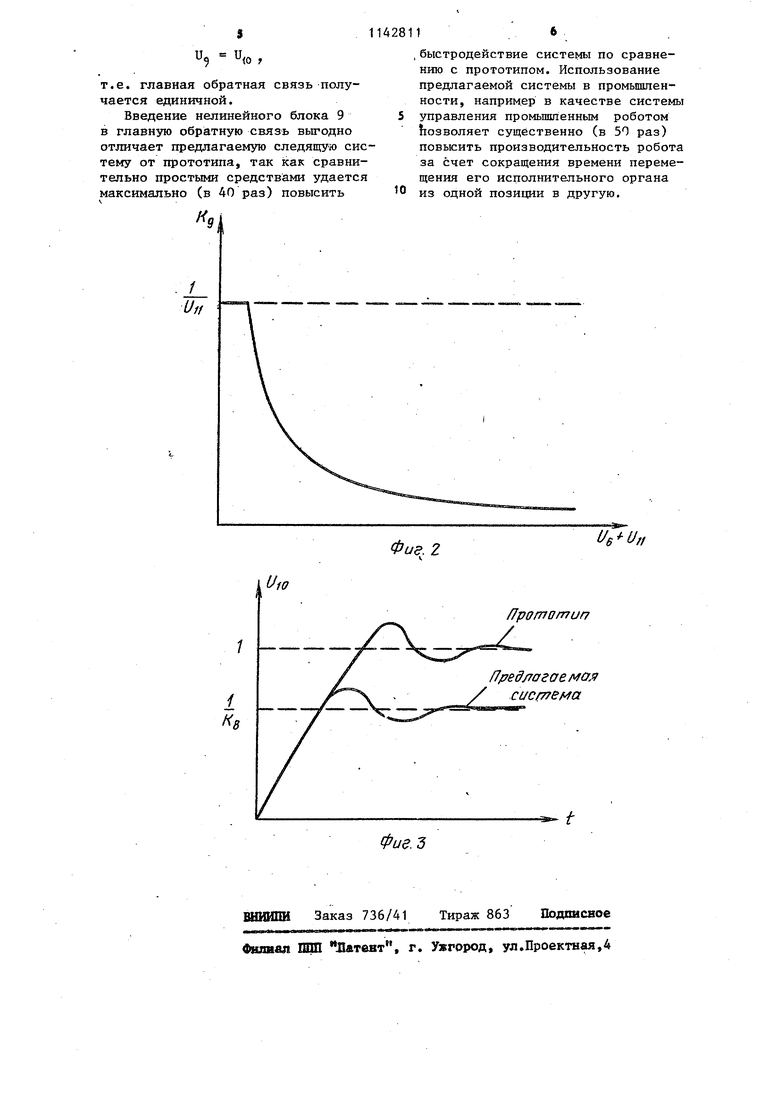
Фиг.1 Изобретение относится к следящим системам автоматического peгyлиpoвa НИН и может найти применение при создании управляемых приводов промьйЕпенных роботов. Известна следящая система, содер жащая последовательно соединенные задат4ик, измеритель рассогласования, регулятор и объект регулирования, вход и выход которого соединен с первым и вторым сигнальными входа ми переключателя, выход которого подключен- к второму входу измерител рассогласования, выходом соединенно го через блок изменения структуры с входом переключателя lj . Известна также следящая..система, содержа щая последовательно соединенные задатчик, измеритель рассогласования, сумматор, усилитель, исполнитёльньй механизм,объект регули рования, датчик скоростной обратной связи и блок деления, выходом соеди ненный с-вторым входом сумматора, а вторым входом через блок вьщеления модуля - с выходом измерителя рассогласования, вторым входом подключенного к выходу объекта регулирования 2 . Однако известные системы характеризуются низким быстродействием. Наиболее близкой по технической сущности к изобретению является сле дящая система, содержащая последова тельно соединенные задатчик, измеритель рассогласования, сумматор, усилитель, исполнительньй двигатель и редуктор, выход которого соединен свходом объекта регулирования и вторым входом измерителя рассогласования, датчик скорости,входом сое диненный с выходом исполнительного двигателя, а выходом - с перввм вхо дом нелинейного блока, вторым входо соединенного с выходом усилителя, третьим входом - с выходом источник постоянного напряжения, а выходом с вторым входом сумматора 5 . Недостаток данной системы состои также в низком быстродействии. Цель изобретения - повьшение быстродействия системы. Поставленная цель достигается тем, что в следящей системе, содержащей последовательно соединенные задатчик, измеритель рассогласования, сумматор и усилитель, соединенный выходом с первым входом, нелинейного блока и с входом исполнительного двигателя, соединенного выходом с входом датчика скорости и через редуктор - с входами объекта регулирования и датчика положения, и источник постоянного напряжения, подключенный выходом к второму входу нелинейного блока, выход датчика скорости соединен с вторым входом .сумматора, выход датчика положения соединен с третьим входом нелинейного блока, соединенного выходом с вторым входом измерителя рассогласования. На фиг.1 приведена блок-схема предлагаемой системы; на фиг.. 2 статическая характеристика нелинейного блока; на фиг.З-- графики переходных процессов при подаче скачкообразных входных воздействий на предлагаемую систему и на прототип. Система включает задатчик 1, измеритель 2 рассогласования, сумматор 3, усилитель 4, исполнительньй двигатель 5, датчик 6 скорости, редуктор 7, датчик 8 положения, нелинейньй блок 9, объект 10 регулирования, источник 11 постоянного напряжения. Кроме того, введены следующие обозначения: U- - выходное напряжение i -го функционального блока, KJ - коэффициент передачи 1-го функционального блока-. Система работает следующим образом. С выхода задатчика 1 напряжение и, пропорциональное заданному положению объекта 10 регулирования, поступает на первьш вход измерителя 2 рассогласования. На второй ВХОД последнего поступает напряжение UQ с выхода нелинейного блока 9. Два напряжения U, и U сравниваются и на выходе измерителя 2 рассогласования формируется напряжение U2, пропорциональное заданной скбрости двигателя 5, которое поступает на первьй вход сумматора 3. На второй инверсный вход сумматора 3 поступает напряжение U с выхода датчика.6 скорости, пропорциональное текущему значению скорости двигателя 5. В соответствии с разностью поступивщих напряжений V 6 сумматор 3 вьрабатьшает управляющее напряжение для двигателя 5, которое поступает на вход усилителя 4. 31 С выхода усилителя 4 напряжение U подается в якорнуюГ цепь исполнительного двигателя 5, приводящего в действие объект 10 регулирования через редуктор 7. Информация о текущем положении объекта 10 регулирования в виде выходного напряжения и датчика 8 положения поступает на третий вход нелинейного блока 9. Йа первый вход нелинейного блока 9 поступает напряжение U(f с выхода усилителя 4. В начальньй момент времени напряжение, поступающее на вход системы с выхода задатчика 1, целиком проходит по прямому тракту системы. Усилитель 4находится в зоне насыщения и на вход двигателя 5 поступает напряжение Щ ,соответствующее номинальному напряжению питания двигателя 5. Это же напряжение и поступает на первый вход нелинейного блока 9. Статическая характеристика нелинейного блока 9 показана на фиг.2, По оси абсцисс откладываются значения суммы напря жений по оси ординат - коэф фициент передачи К нелинейного блока 9 1 К„ --гг;- 1 (1) 9 . где и,д - выходное напряжение уси лителя 4 Ui, - выходное напряжение ист ника постоянного напряж ния. Источник 11 постоянного напряжения введен в систему для того, чтобы избежать деления на ноль. Из фиг.2 видно, что при больших значениях выходного напряжения U. усилителя 4 коэффициент передачи нелинейного блока 9 имеет небольшо значение и меняется незначительно при больших изменениях напряжения Величина - напряжения U нелинейного блока 9 определяется значениями ег коэффициента передачи К и напряже ния Ug,поступающего на третий вход нелинейного блока 9 с выхода датчи ка 8 положения
(2)
и, vUg.
Отсюда видно, что пока напряжение Ui), большое и объект регулирования 10 находится далеко от требуе(5)
Ug Kg.U,o..
Подставляя (5) в (4), получим равенствомого положения, т.е. напряжение Ug небольшое, величина напряжения U также будет незначительной. Поэтому разность напряжений , которую формирует измеритель 2 рассогласования, остается большой для того, чтобы усилитель 4 находился в насыщении, и на двигатель 5 поступает номинальное напряжение питания. При этом объект 10 регулирования перемещается к требуемому положению с максимальной скоростью. При приближении объекта 10 регулирования к требуемому положению величина выходного напряжения Ug датчика 8 положения становится большой. Усилитель 4 работает теперь на линейном участке, т.е. его выходное напряжение U4 становится небольшим. При этом коэффициент передачи Кл нелинейного блока 9 резко возрастает, что приводит к быстрому рйсту величины сигнала его выходного напряжения и. Разность напряжений U и Un поступающих на входы измерителя 2 рассогласования, максимально быстро стремится к нулю, двигатель 5 останавливается. Дпя достижения соответствия между входным и выходным сигналами в установившемся положении главную обратную связь нужно сделать единичной. С этой целью величина выходного напряжения U источника 11 постоянного напряжения выбирается равной величине коэффициента передачи Kg датчика 8 положения т.е. Kg. Тогда в установившемся положении системы выходное напряжение U усилителя 4 равно нулю и из формулы (1) следует, что к - 1 подставляя (3) в (2), получаем Выходное напряжение Ug датчика 8 положения связано с выходным напряжением и (д, по ступающим от объекта 10 регулирования на датчик 8 положения, соотношением
о t
9
т.е. главная обратная связь получается единичной.
Введение нелинейного блока 9 в главную обратную связь выгодно отличает предлагаемую следящУЮ систему от прототипа, так как сравнительно простыми средствами удается максимально (в 40 раз) повысить
,быстродействие системы по сравнению с прототипом. Использование предлагаемой системы в промышленности, например в качестве системы управления промышленным роботом 1озволяет существенно (в 50 раз) повысить производительность робота за счет сокращения времени перемещения его исполнительного органа из одной позиции в другую.
Фие. 2
i
«8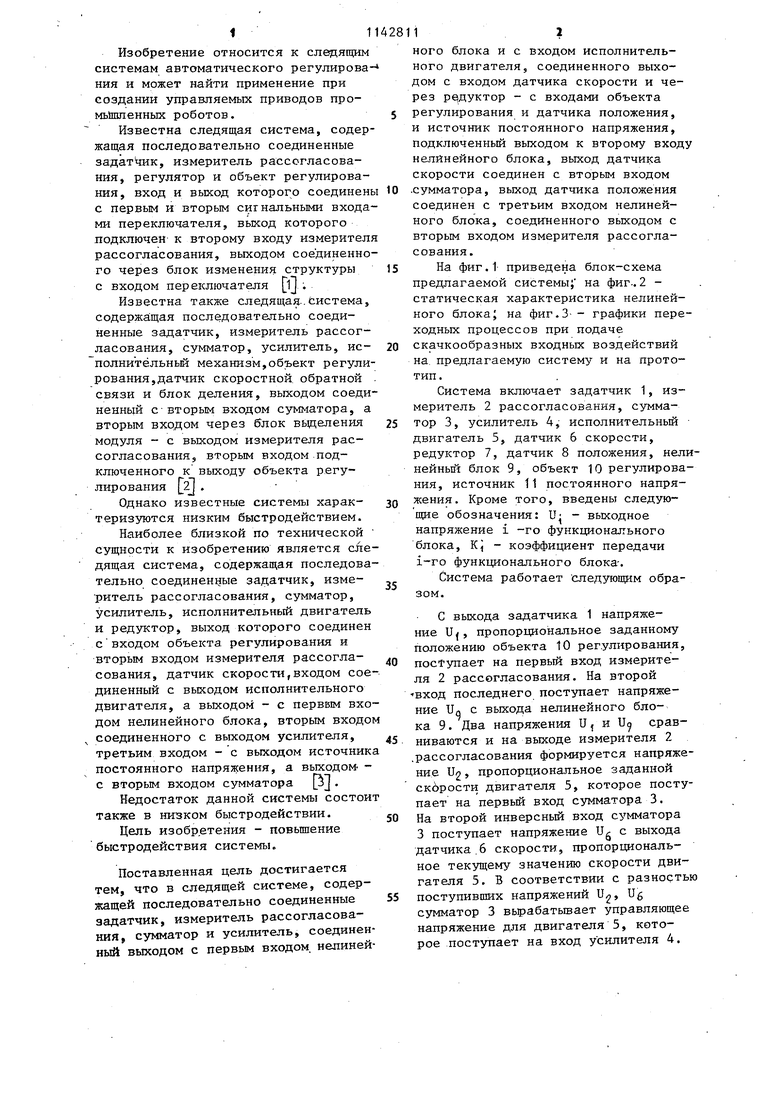
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1982 |
|
SU1109711A1 |
| Нелинейная следящая система | 1988 |
|
SU1559328A2 |
| Следящая система | 1978 |
|
SU746406A1 |
| Двухканальная система управления телескопом | 1983 |
|
SU1171752A1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Следящая система | 1987 |
|
SU1499315A1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
СЛЕДЯЩАЯ СИСТЕМА, содержащая последоват.ельно соединенные задатчик, измеритель рассогласования, сумматор и усилитель, соединенный выходом с первым входом нелинейного блока и с входом исполнительного двигателя, соединенного выходом с входом датчика скорости и через редуктор - с входами объекта регулирования и датчика положения, и источник постоянного напряжения, подключенный выходом к второму входу нелинейного блока, отличающаяся тем, что, с целью повышения быстродействия системы, в ней выход датчика скорости соединен с вторым входом сумматора, выход датчика положения соединен с третьим входом нелинейного блока, соединенного выходом с вторым входом измерителя рассогласования.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство стабилизации системы автоматического регулирования для объектов с самовыравниванием | 1976 |
|
SU615455A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
