обмоток ротора, моделируются продоль- jj 1 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1988 |
|
SU1686595A1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504728A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Устройство для управления машиной двойного питания /его варианты/ | 1982 |
|
SU1116516A1 |
| Способ пуска машины переменного тока | 1982 |
|
SU1069106A1 |
| Устройство для связи энергосистем | 1988 |
|
SU1669043A1 |
| Устройство для защиты от несимметричной потери возбуждения асинхронизированной синхронной машины | 1988 |
|
SU1541703A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1115164A1 |
Изобретение относится к электротехнике, в частности к релейной защите, и может быть использовано для защиты асинхрованной синхронной машины с продольной и поперечной обмотками возбуждения от повреждения. Цель изобретения - расширение функциональных возможностей путем автоматического выявления повреждений обмоток статора и продольной и поперечной обмоток ротора асинхронизированной синхронной машины. В блоке 3 выделения ЭДС соединенном с датчиками тока и напряжения, вычисляется ЭДС обмотки статора, которая в блоке 5 преобразования координат, соединенном с блоком 3 и углоизмерительной машиной 4, разлагается на продольную ED и поперечную EG составляющие. В блоке 8, подключенном к датчикам токов обмоток ротора, моделируются продольная ED и поперечная EG ЭДС. С помощью сумматоров 9 и 10 определяются небалансы продольных и поперечных ЭДС, сформированных на выходах блоков 5 и 8. Сигнал на выходе блока сравнения 11 /12/ формируется при превышении соответствующим небалансом ЭДС на входе определенной уставкой. Определение поврежденной обмотки и формирование соответствующего управляющего воздействия осуществляется с помощью логических элементов И 13, 16, 17, НЕ 14 и исполнительного органа 15. 1 ил.
Изобретение относится к электротехнике, в частности к релейной защите, и может быть использовано для защиты асинхронизированной синхронной машины с продольной и поперечной обмотками возбуждения от повреждения.
Цель изобретения - расширение функциональных возможностей путем автоматического выявления повреждений обмоток статора и продольной и поперечной обмоток ротора асинхронизированной синхронной машины.
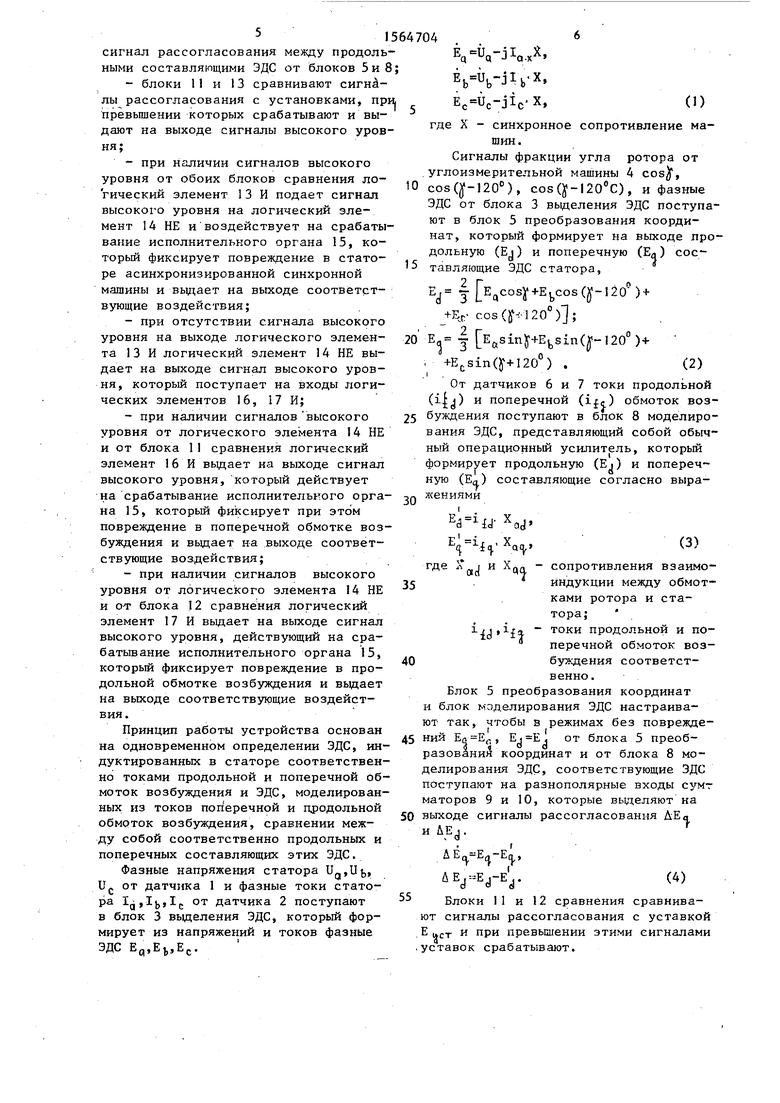
На чертеже представлена блок-схема предлагаемого устройства.
Схема содержит датчик 1 напряжения статора и датчик 2 тока статора, подключенные к блоку выделения ЭДС 3, углоизмерительная машина 4, выход которой соединен блоком 5 преобразования координат, датчики 6, 7 токов соответственно поперечной и продольной обмоток возбуждения, подключенные к блоку моделирования ЭДС 8, сумматоры 9, 10, соединенные с блоками 11, 12 сравнения, логический элемент И 13, логический элемент НЕ 14, исполнительный орган 15 к которому подключены выходы логических элементов И 16 и 17.
Блок 3 выделения ЭДС соединен с выходами датчиков 1 и 2 соответственно напряжений и токов статора, а выходом - с первым входом блока 5 преобразования координат. Блок 5 преобразования координат другим входом соединен с углоизмерительной машиной 4, а выходом с сумматорами 9 и 10. Блок 8 моделирования ЭДС входами соединен с датчиками 6 и 7 токов Продольной и поперечной обмоток рото0
5
0
5
0
5
0
5
ра, а выходами - с сумматорами 9 и 10. Сумматор 9 выходом соединен со входом блока 11 сравнения, выход которого соединен со входами логических элементов И 16 и 13. Сумматор 10 соединен со входом блока 12 сравнения, выход которого соединен со входами логических элементов И 13 и 17. Выход логического элемента И 13 через логический элемент НЕ 14 соединен со входами логических элементов И 17 и 16. Выходы исполнительного органа 15 соединены с выходами логических элементов И 13, 16 и 17.
i
Назначение блоков следующее:
-измеренные с помощью датчика 1 напряжения статора и датчика 2 токи статора поступают в блок 3 выделения ЭДС, который выделяет на выходе ЭДС. индуктированную токами ротора в статоре;
-ЭДС, выделенных блоками 3, и сигнал в функции угла поворота ротора от углоизмерительной машины 4 поступают в блок 5 преобразования координат, который выделяет на выходе продольную и поперечную составляющие ЭДС, приведенные к осям ротора;
-измеренные датчиками 6 и 7 токов ротора токи продольной и поперечной обмото к возбуждения поступают в блок 8 моделирования ЭДС, который выделяет на выходе моделированные продольную
и поперечную составляющие ЭДС;
-сумматор 9 выделяет на выходе
.. сигнал рассогласования между поперечными составляющими ЭДС от блока 5 преобразования координат и от блока 7 моделирования ЭДС, а сумматор 10 ь1564704
сигнал рассогласования между продольными составляющими ЭДС от блоков 5 и 8;
- блоки 11 и 13 сравнивают сигналы рассогласования с установками, при.
превышении которых срабатывают и выдают на выходе сигналы высокого уровня;
-при наличии сигналов высокого уровня от обоих блоков сравнения ло- гический элемент 13 И подает сигнал высокого уровня на логический элемент 14 НЕ и воздействует на срабатывание исполнительного органа 15, который фиксирует повреждение в статоре асинхронизированной синхронной машины и выдает на выходе соответствующие воздействия;
-при отсутствии сигнала высокого уровня на выходе логического элемента 1 3 И логический элемент 14 НЕ выдает на выходе сигнал высокого уровня, который поступает на входы логических элементов 16, 17 И;
-при наличии сигналов высокого уровня от логического элемента 14 НЕ и от блока 11 сравнения логический элемент 16 И выдает на выходе сигнал высокого уровня, который действует
на срабатывание исполнительного органа 15, который фиксирует при этом повреждение в поперечной обмотке возбуждения и выдает на выходе соответствующие воздействия;
-при наличии сигналов высокого уровня от логического элемента 14 НЕ и от блока 12 сравнения логический элемент 17 И выдает на выходе сигнал высокого уровня, действующий на срабатывание исполнительного органа 15, который фиксирует повреждение в продольной обмотке возбуждения и выдает на выходе соответствующие воздействия.
Принцип работы устройства основан
10
30
35
40
VVJIox.
Е UC-JVX,
(1)
с с
где X - синхронное сопротивление машин.
Сигналы фракции угла ротора от углоизмерительной машины 4 , cosg-120°), cosQ-l20°C), и фазные ЭДС от блока 3 выделения ЭДС поступают в блок 5 преобразования координат, который формирует на выходе про дольную (Ej) и поперечную (Е,) сос- 5 тавляющие ЭДС статора,
Е | E4cosj4-Ebcos(y-120°) +
+Ег- cos(j 120°); 20 Е | EftsinJ+Ebsin(J-120°) +
. +Ecsin(3f+120°) .(2)
От датчиков 6 и 7 токи продольной (i|j) и поперечной (ifс) обмоток воз- 25 буждения поступают в блок 8 моделирования ЭДС, представляющий собой обычный операционный усилитель, который формирует продольную (Ei) и поперечную (Ел) составляющие согласно выражениями
Ej-i , i
if Xod
Хац,
(3)
где
лас(
и X
-сопротивления взаимоиндукции между обмотками ротора и статора;
-токи продольной и поперечной обмоток возбуждения соответственно.
Блок 5 преобразования координат и блок моделирования ЭДС настраивают
Ц
так, чтобы в режимах без повреждег,г,„ 45 ний ., , от блока 5 преоб- на одновременном определении ЭДС, ин- 1 Ч ° ° - о
разованин координат и от блока 8 мо- дуктированных в статоре соответствен-„„.,„.„
делирования ЭДС, соответствующие ЭДС
статоре соответственно токами продольной и поперечной обмоток возбуждения и ЭДС, моделированных из токов поперечной и продольной обмоток возбуждения, сравнении между собой соответственно продольных и поперечных составляющих этих ЭДС.
Фазные напряжения статора U,Uf,, LTC от датчика 1 и фазные токи статопоступают на разнополярные входы сумт маторов 9 и 10, которые выделяют на 50 выходе сигналы рассогласования ДЕа H&Ej.
pa Ia,Ij,,Ic от датчика 2 поступают в блок 3 выделения ЭДС, который формирует из напряжений и токов фазные ЭДС Ед.,,.
Д Еп-Ед-Е,
AEj«Ej-Ej.(4)
55 Блоки И и 12 сравнения сравнивают сигналы рассогласования с уставкой Е ьст и ПРИ превышении этими сигналами уставок срабатывают.
0
0
VVJIox.
Е UC-JVX,
(1)
с с
где X - синхронное сопротивление машин.
Сигналы фракции угла ротора от углоизмерительной машины 4 , cosg-120°), cosQ-l20°C), и фазные ЭДС от блока 3 выделения ЭДС поступают в блок 5 преобразования координат, который формирует на выходе продольную (Ej) и поперечную (Е,) сос- 5 тавляющие ЭДС статора,
Е | E4cosj4-Ebcos(y-120°) +
+Ег- cos(j 120°); 0 Е | EftsinJ+Ebsin(J-120°) +
. +Ecsin(3f+120°) .(2)
От датчиков 6 и 7 токи продольной (i|j) и поперечной (ifс) обмоток воз- 5 буждения поступают в блок 8 моделирования ЭДС, представляющий собой обычный операционный усилитель, который формирует продольную (Ei) и поперечную (Ел) составляющие согласно выражениями
Ej-i , i
if Xod
Хац,
(3)
5
0
где
лас(
и X
-сопротивления взаимоиндукции между обмотками ротора и статора;
-токи продольной и поперечной обмоток возбуждения соответственно.
Блок 5 преобразования координат и блок моделирования ЭДС настраивают
Ц
так, чтобы в режимах без повреждепоступают на разнополярные входы сумт маторов 9 и 10, которые выделяют на 50 выходе сигналы рассогласования ДЕа H&Ej.
Д Еп-Ед-Е,
AEj«Ej-Ej.(4)
Блоки И и 12 сравнения сравнивают сигналы рассогласования с уставкой Е ьст и ПРИ превышении этими сигналами уставок срабатывают.
В режимах без повреждений обмоток
ctaropa и ротора сигналы &Е , и ДЕЯ
нулю и орг.аны сравнения не срабДтывают, на выходах всех трех логических элементов И имеются сигналы низкого уровня и исполнительный орган ни срабатывает.
При повреждении обмотки статора изменяются синхронное сопротивление генератора X и сопротивление взаимоиндукции с обеими обмотками возбуждения Xqj,Xq(,. Равновесие ЭДС на выхо д,4х блока 5 преобразователя координат и блока 8 моделирования ЭДС нарушает- сЯ, так как в уравнениях (1) ЭДС поврежденной обмотки (межвитковые замыкания или короткие замыкания в об- метках статора) не соответствуют ЭДС, наведенной током ротора в статоре. В соответствии с (4) на выходах обо- rot сумматоров 9 и 10 сигналы рассогласования не равны нулю и при пре- в ппении ими уставок срабатывают оба бйока 11, 12 сравнения, которые по- дЈют на оба входа логического элемента И сигналы высокого уровня, на выходе логического элемента 13 И появляется сигнал высокого уровня, определяется повреждение в ста- тррной обмотке. Логические элементы 10 и 17 на одном из входов имеют сигналы низкого уровня, а на выходе ийеют сигналы низкого уровня, исполнительный орган 15 при этом вырабатывает на выходе соответствующие дан- нрму повреждению воздействующие сиг- н&лы (отключение выключателей, гашение поля, останов машины, сигнализация и т.д.).
При повреждениях в поперечной обмотке возбуждения изменяется сопротивление взаимоиндукции между поперечной обмоткой возбуждения и обмотками статора, а между продольной обмоткой возбуждения и обмотками статора не изменяется, поэтому нарушается равновесие ЭДС Ел и ЕЛ, а между EJ и EJ не нарушается (см.4, а на выходе сумматора 9 появляется сигнал рассогласования ДЕ а и при превышении им уставки срабатывает блок 11 сравнения, который подает сигналы высокого уровня на входы логических элементов И 13 и 16. На втором входе логического элемента И 13 имеется сигнал низкого уровня, логический элемент на входе имеет сигнал низкого уровня, который подается на вто
0
5
0
5
0
5
0
рой вход логического элемента И 16, на выходе которого появляется сигнал высокого уровня, а на выходе логического элемента И 17 имеется сигнал низкого уровня, Этим выявляется повреждение поперечной обмотки возбуждения (межвитковые замыкания, короткие замыкания поперечной обмотки возбуждения) и исполнительный орган 15 вырабатывает соответствующие воздействующие сигналы (гашение поля поперечной обмотки возбуждения, перевод машины в синхронный режим, изменение мощности первичного двигателя и т.д). При повреждении продольной обмотки возбуждения устройство работает аналогично, только равновесие нарушается
между Е i и EJ и исполнительный орган
о о действует соответствующим образом
(гашение поля продольной обмотки возбуждения и т.д.).
Уставка блоков 11 и 12 сравнения выбирается исходя из погрешностей элементов устройства и возможных от- .клонений параметров машины в эксплуатационных режимах.
Таким образом, данное устройство в отличие от прототипа дифференцированно выявляет повреждение обмоток статора и ротора асинхро низированной синхронной машины с двумя обмотками на роторе, что расширяет функциональные возможности устройства и способствует повышению надежности работы защищаемой машины.
Формула изобретения
Устройство для защиты синхронной машины от повреждения, содержащее датчики тока статора и ротора, блок сравнения, исполнительный орган, о т- личающееся тем, что, с целью повышения надежности машины путем автоматического выявления поврежде- ний обмоток статора и ротора асин- хронизированной синхронной машины, в него дополнительно введены датчик напряжения статора, второй датчик тока ротора, углоизмерительная машина, блок выделения ЭДС статора, блок преобразования координат, блок моделирования ЭДС, два сумматора, второй блок сравнения, три логических элемента И и логический элемент НЕ, причем блок выделения ЭДС входами соединен с датчиками тока и напряжения статора, а выходом - с первым
9156470410
входом блока преобразования коорди- ;го и второго логических элементов И, нат, второй вход которого подключена также с первым и вторым входами к выходу углоизмерительной машины,третьего логического элемента И, вы- а выходы - соответственно к первымходы всех логических элементов И под- входам обоих сумматоров, вторые входыключены к исполнительному органу, которых соединены с выходами блока .выход третьего логического элемента И моделирования ЭДС, входами подключен-через логический элемент НЕ связан ного к выходам первого и второго дат-с вторыми входами первого и второго чиков -тока ротора,выходы обоих сумма- JQлогических элементов И, а исполни- торов через соответствующие блокительный орган выполнен с тремя входа- сравнения - с первыми входами перво-ми и тремя выводами.
| УСТРОЙСТВО для ЗАЩИТЫ ЦЕПЕЙ ВОЗБУЖДЕНИЯ СИНХРОННОЙ МАШИНЫ | 0 |
|
SU271622A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для защиты синхронного генератора от повреждений | 1976 |
|
SU581545A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
