Изобретение относится к гироскопическому приборостроению и может быть использовано при создании приборов, предназначенных д я определения азимутов ориентиры к направлений с высокой точностью.
Цель изобретения - попмшение точности определения азимутов ориентирных направлении.
На чертеже изоПр 1Деча ьонструктив- ная схема преп гл г лгмсч о гирогеодоли- тл .
Чувстлительнпи 1 нл тор- i ионе . подрсччн вн грч е ян-.чо
корпуса 3, где закреплен автоколлима- тор 4, являющийся датчиком следящей системы, с отсчетным зеркалом 5 и исполнительным приводом 6. На неподвижном корпусе установлен контрольный элемент 7 в виде двустороннего зеркала, которое находится в канале визирования автоколлиматора с одной стороны и в канале визирования зрительной трубы 8 через триппель-призму 9 с другой стороны.
Отсчетньгй лимб 10 выполнен поворотным относительно неподвижного корпуса и снабжен фиксатором 11. На
сп
оэ
о
06
J
00
следящем корпусе закреплен ротор 12 кодового датчика угла, а статор 13 установлен на неподвижном корпусе. Выход кодового датчика угла соединен со спецвычислителем 14„
Гиротеодолит работает следующим образом.
При отслеживании автоколлнматора за чувствительным элементом информация с кодового датчика угла поступает в спецвычислитель, который осуществляет цифровую фильтрацию поступающей информации от помехи типа наложенных колебаний чувствительного элемента и определяет отсчет Р, соответствующий положению равновесия прецессионных колебаний, т.е. плоскости меридиана. Затем автоколлиматор со следящим корпусом и контрольным элементом разворачивается, после чего осуществляется привязка автоколлиматора к контрольному элементу с фиксацией отсчета по кодовому счетчику угла. Разность двух упомянутых отсчетов явл1ется азимутом контрольного элемента,.
Одновременно с указанным оператор производит многократное измерение теодолитной частью угла между контрольным элементом и ориентиром (двумя кругами с перестановкой лимба мегеду приемами) Сумма значений замеренного угла и азимута контрольно
5
0
5
0
5
го элемента является азимутом ориентирного направления.
Формула изобретения
1.Гиротеодолит, содержащий неподвижный корпус, чувствительный элемент, подвешенный внутри следящего корпуса, фотоэлектрический автоколлиматор, закрепленный на следящем корпусе и являющийся датчиком следящей системы, и теодолитную часть с отсчетным лимбом и зрительной трубой для визирования на ориентир, отличающийся тем, что, с целью повышения точности оп едепения азимутов ориентирных направлении, в него введено дополнительное угломерное устройство в виде кодового датчика угла, ротор и статор которого закреплены на следящем и неподвижном корпусах гиротеодолита соответственно, а выход связан с входом электронного спецвычислителя для обработки информации об угловых положениях чувствительного элемента, а также контрольный элемент, -установленный на непод- ввдсном корпусе и оптически связан::
с каналом визирования автоколлиматора с одной стороны и с каналом визирования зрительной трубы с другой стороны.
2.Гиротеодолит по п.отличающийся тем, что контрольный элемент выполнен в виде двустороннего автоколлимационного зеркала .
12
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОТЕОДОЛИТ | 1971 |
|
SU300756A1 |
| Гирокомпас | 1990 |
|
SU1756761A1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| ПОЛЯРИМЕТРИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ВЗАИМНОГО РАЗВОРОТА | 1992 |
|
RU2047836C1 |
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |
| ГИРОТЕОДОЛИТ | 1972 |
|
SU337646A1 |
| Маркшейдерский гирокомпас | 1990 |
|
SU1808119A3 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| СПОСОБ ГОРИЗОНТАЛЬНОЙ СОЕДИНИТЕЛЬНОЙ СЪЕМКИ ПОДЭТАЖНЫХ ГОРИЗОНТОВ | 2018 |
|
RU2677089C1 |
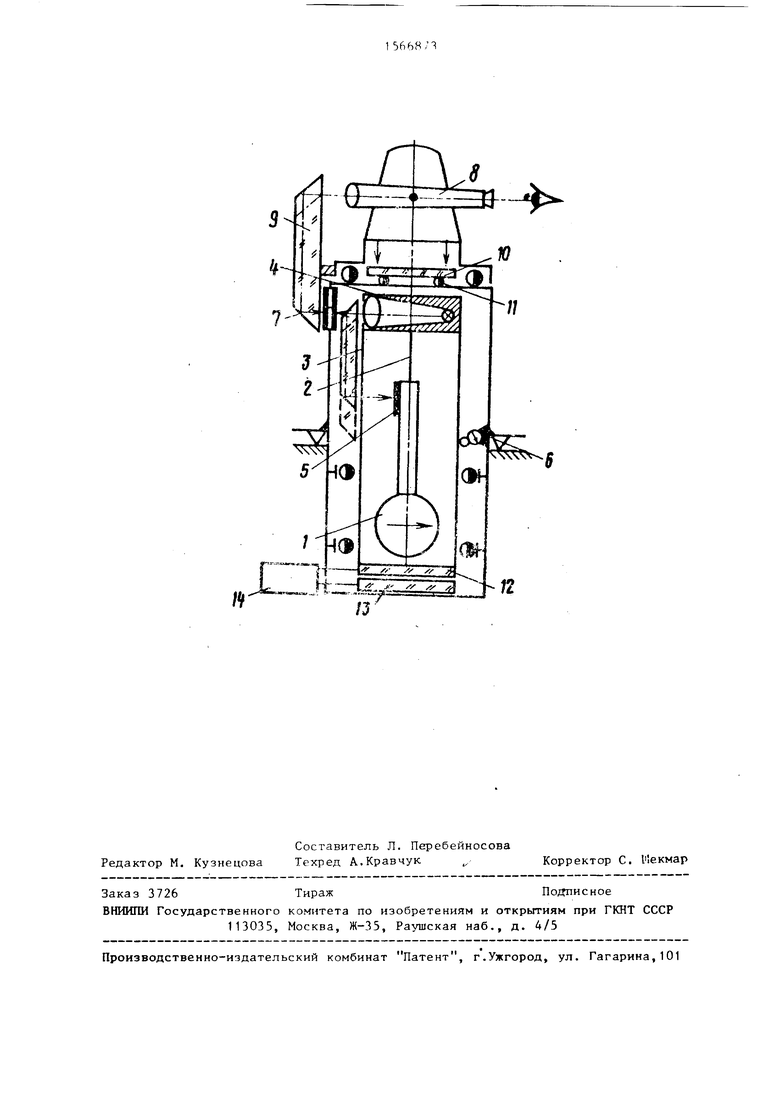
Изобретение относится к гироскопическому приборостроенш и может быть использовано при создании приборов, предназначенных дтп огурец с юния азимутов ориентирных направлений с высокой точностью, Цель изобретения - повышение точности о прел елспня азимутов ориентирных направлений. Предлагаемый гиротеололит содержит чувствительный элемент 1, подвешенный на торсионе 2 внутри следящего корпуса 3, где закреплен автоколлиматор 4, являющийся датчиком следящей системы, с исполнительным приводом 6. На неподвижном корпусе установлен контрольный элемент 7 в вид двустороннего зеркала, которое находится в канале визирования автоколлиматора с одной стороны и в канале визирования зритепьной трубы 8 через триппель-призму 9 с другой стороны. Существующие погрешности в предлагаемом гиротеодолите сводятся до незначимого уровня за счет увеличения информации о текущих условиях положения чувствительного элемента, поступающей в кодовый датчик угла, и за счет многократности приемов измерения угла по оптическому лимбу с учетом его перестановок в азимуте. 1 ил. г (Л
