Изобретение относится к системам автоматического управления и регулирования, в частности к гиростабилизированным устройствам, и используется для обеспечения стабилизации линии визирования оптических приборов, размещаемых на подвижных объектах.
Известно устройство [1] стабилизации линии визирования, содержащее рамку, зеркало, исполнительные двигатели каналов азимута и высоты, установленные на осях вращения рамки и зеркала, усилительно-корректирующие устройства каналов азимута и высоты, выход каждого из которых связан с входом исполнительного двигателя соответствующего канала, датчик угла, установленный на оси вращения зеркала, гироскопические датчики угловой скорости, дифференцирующее устройство, вычислительное устройство, перемножитель, сумматор, вычитающее устройство.
Недостатком данной системы является низкая точность стабилизации и наличие высокого дрейфа.
Наиболее близкой к заявленному изобретению является система [2] стабилизации оптического изображения, содержащее два двухстепенных гироскопа и два зеркала, первое из которых неподвижно, а второе установлено с возможностью вращения одновременно вокруг двух осей, первая из которых лежит в плоскости этого зеркала перпендикулярно оптической оси прибора, а вторая расположена перпендикулярно первой и перпендикулярно оптической оси, причем гироскопы установлены с возможностью измерения угловых скоростей поворота устройства соответственно вокруг собственно оптической оси и вокруг оси, перпендикулярной его оптической оси, и через системы управления соединены со второй и первой осями.
Недостатком данной системы является то, что гироскопические датчики угловой скорости находятся вне замкнутого контура стабилизации, поскольку не регистрируют непосредственно скорость вращения зеркала, и подвержены
воздействию значительной угловой скорости основания. Отклонение коэффициента ленточной передачи от 1:2, связанное с погрешностью изготовления деталей, приводит так же к возникновению дополнительной составляющей ошибки стабилизации линии визирования при качке подвижного основания по вертикали. Указанные факторы снижают точность стабилизации линии визирования.
Технический результат заявленного изобретения заключается в повышении точности стабилизации за счет компенсации перекрестных связей датчиков угловых скоростей (ДУС), измеряющих угловую скорость стабилизируемой нагрузки по каналам тангажа, азимута и крена, и удаления постоянной составляющей из выходного сигнала ДУСов.
Задачей, на решение которой направлено данное изобретение, является повышение точности стабилизации за счет устранения погрешностей, обусловленных неточностью совмещения системы координат, связанной с измерительными осями датчиков угловых скоростей, относительно системы координат, связанной с линией визирования, компенсации ошибки позиционирования, вызванная наличием постоянной составляющей в сигнале с датчиков угловых скоростей, непосредственного измерения угловой скорости движения стабилизируемой нагрузки, осуществлением прямой стабилизации оптической нагрузки без использования ленточной передачи.
Поставленная задача решается за счет того, что система стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленной на ней стабилизируемой нагрузкой, карданов подвес, гироскоп с датчиками угла, усилительно-корректирующее устройство, представляющее контур стабилизации, содержащий усилитель, вход которого соединен с датчиком угла гироскопа, устройство суммирования, на вход которого поступает сигнал усилителя и сигнал со звена удаления постоянной составляющей ДУСа, а выход со звеном коррекции, выход которого соединен с сумматором, на вход которого поступает сигнал с датчика тока и выходной сигнал звена коррекции, выход которого соединен с усилителем мощности, выход усилителя мощности соединен с двигателем, согласно изобретению, содержит датчики угловых скоростей ДУС, измеряющие угловую скорость стабилизируемой нагрузки по каналам тангажа, азимута, крена, при этом выход ДУС соединен со звеном удаления постоянной составляющей.
Одним существенным отличием заявленного изобретения является введение в контур системы стабилизации датчиков, измеряющих угловую скорость стабилизируемой нагрузки по каналам тангажа, азимута, крена и последующая компенсация перекрестных связей, вызванных неидеальной плоскостью установки датчиков вследствие допусков на изготавливаемые детали, установочные поверхности и способы крепления.
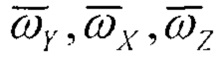
На фиг. 1 представлена кинематическая схема предложенной системы.
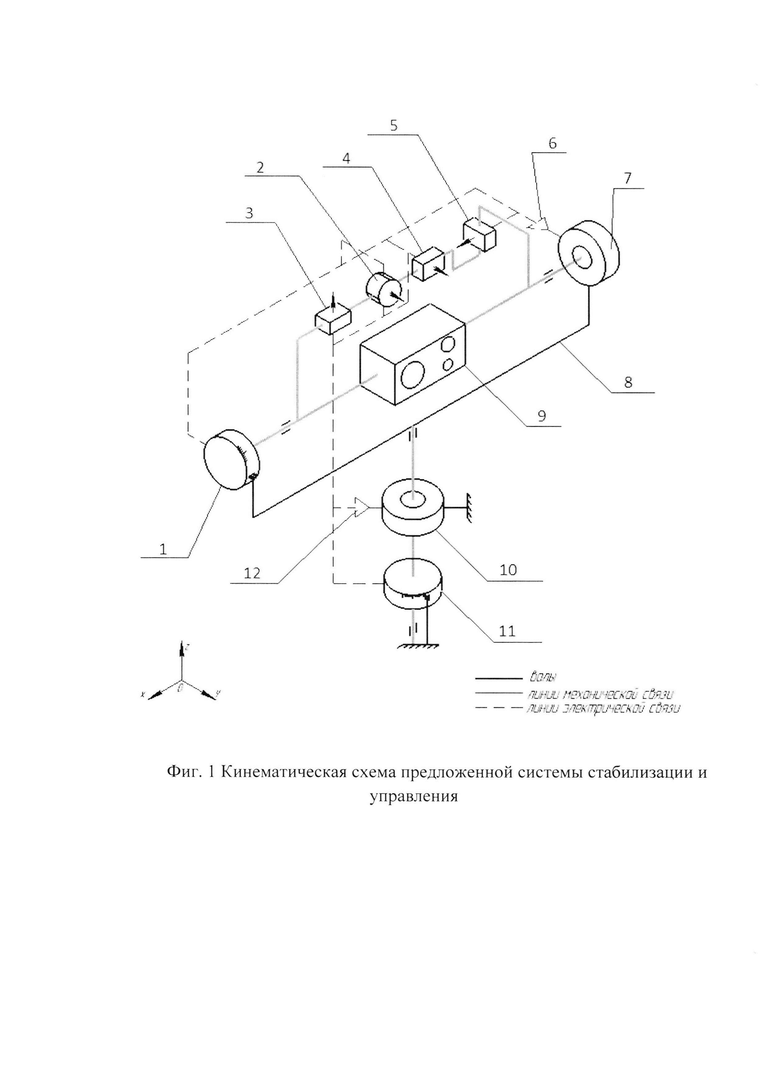
На фиг. 2 представлено положение осей и проекции скорости на чувствительную ось ДУСа.
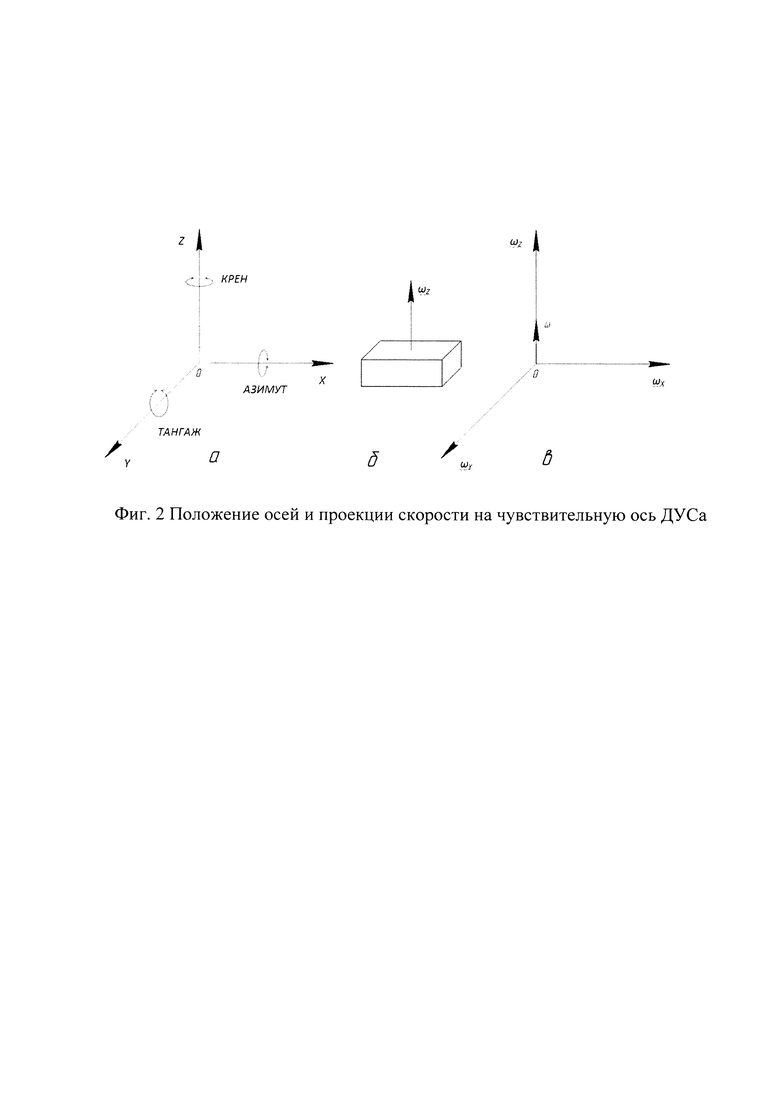
На фиг. 3 представлено отклонение чувствительных осей ДУСов в реальной системе.
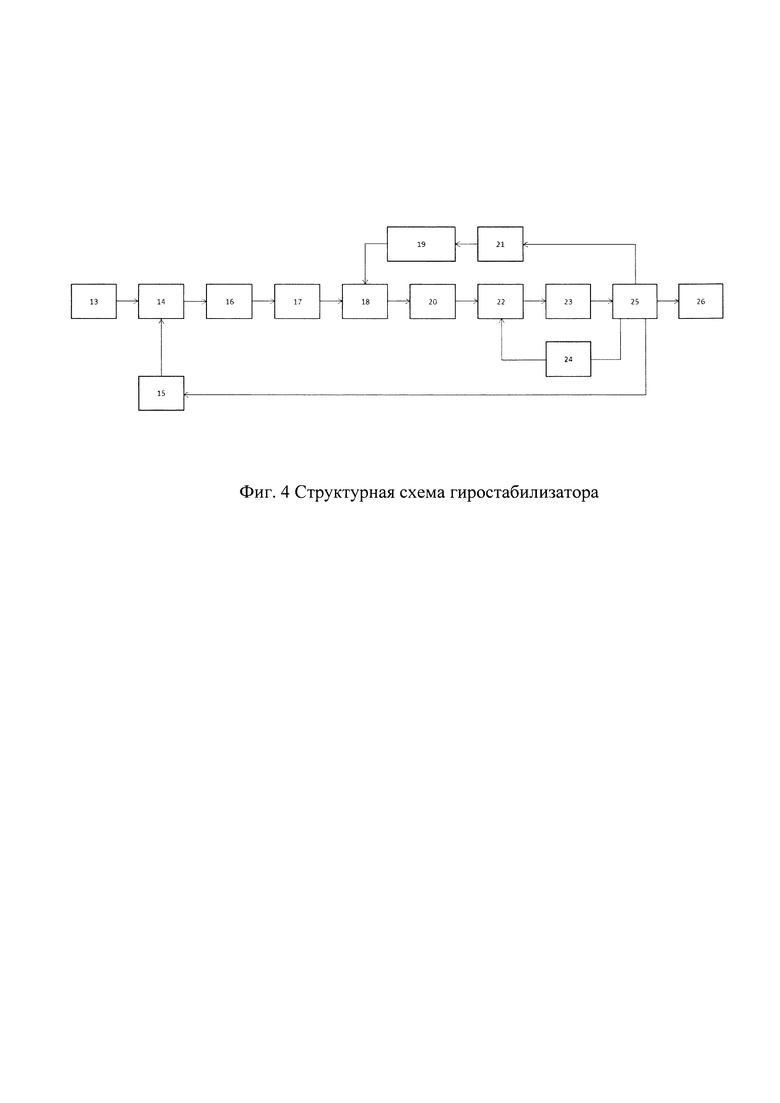
На фиг. 4 представлена структурная схема предложенной системы.
Система стабилизации (фиг. 1) работает следующим образом.
Основой гиростабилизатора является двухосных гироскопический датчик угла (2), жестко закрепленный вместе со стабилизируемой нагрузкой (прицельным модулем ПМ) (9) в кардановом подвесе на раме привода вертикального наведения (8). Гироскопический датчик угла (2) обеспечивает моделирование в инерциальном пространстве двух ортогональных осей с возможностью разворота моделируемых осей в инерциальном пространстве с требуемой скоростью. Измерительные оси совпадают с осями вращения ПМ (9), на осях которых жестко закреплены датчики момента вертикального (привод ВН) (7) и горизонтального (привод ГН) (10) наведения, которые через усилительно-корректирующие устройства привода ВН (6) и привода ГН (12) связаны с выходами соответствующих датчиков угла гироскопа. Гироскоп (2) вместе с датчиками момента вертикального канала (7) и горизонтального канала (10) образуют следящую систему. Угловые возмущения ПМ (9) передаются на корпус гироскопа (2). При развороте корпуса гироскопа (2) относительно неподвижного в инерциальном пространстве ротора появляется электрический сигнал рассогласования, пропорциональный углу поворота ПМ (9). Под действием усиленного сигнала рассогласования датчик момента разворачивает ПМ (9) так, чтобы обеспечить равенство нулю выходного сигнала гироскопа. Таким образом, обеспечивается стабилизация ПМ (9) в двух плоскостях.
Стабилизированный разворот ПМ (9) осуществляется путем разворота ротора гироскопа (3) в инерциальном пространстве за счет встроенных в гироскопический датчик угла датчиков момента. При этом разворот ПМ (9) осуществляется следящей системой через соответствующие датчики момента вертикального (7) и горизонтального наведения (10).
Для измерения углов наведения ПМ (9) по каналам ВН и ГН в состав гиростабилизатора входят датчики угла вертикального (ДУ ВН) (1) и горизонтального (ДУ ГН) (11) наведения. Датчики угла измеряют угловое положения ПМ (9) относительно корпуса гиростабилизатора.
Стабилизация ПМ осуществляется непосредственно, т.е. без использования ленточной передачи, что, в свою очередь, позволяет избежать возникновения дополнительной составляющей ошибки стабилизации линии визирования при качке подвижного основания по вертикали.
Для повышения точности стабилизации в состав гиростабилизатора входят датчики угловых скоростей (волоконные датчики вращения), которые устанавливаются на стабилизируемую нагрузку для измерения непосредственной угловой скорости ПМ по каналам азимута (ВОГ(Х)) (5), тангажа (ВОГ(У)) (4), крена (ВОГ(Z)) (3). Полученные значения скоростей ПМ (9) используются для организации контура обратной связи по скорости системы автоматического управления.
На фиг. 2 показаны положения осей (фиг. 2, а) и проекции скоростей на чувствительные оси ДУСов (фиг. 2, б) - при вращении системы по оси со скоростью со и совпадении направления оси вращения с чувствительной осью ДУСа, вся скорость проецируется на ось ДУС (фиг. 2, в).
При установке ДУСа в реальной системе невозможно абсолютно точно совместить чувствительную ось с осью вращения по причине неидеальной плоскости установки датчика вследствие допусков на изготавливаемые детали, установочные поверхности, способы крепления датчиков, а также несовершенства самой датчиковой аппаратуры. В результате этого чувствительная ось датчика оказывается повернутой на некоторый угол (фиг. 3).
Такое положение осей приводит к возникновению перекрестных связей ДУСов системы, в результате которых при появлении вращения строго по одной оси будет появляться выходной сигнал с ДУСов, расположенных на других осях, а на чувствительную ось ДУСа, относительно которой происходит вращение системы, будет проецироваться значение угловой скорости меньше реального.
Это явление называется ошибкой по перекрестным связям.
Ошибку по перекрестным связям можно компенсировать путем механической регулировки положения ДУСа относительно корпуса изделия. Такая регулировка необходима, если в системе стабилизации установлен ДУС по одной или двум измерительным осям. Однако, механическая регулировка не позволяет скомпенсировать "в ноль" ошибку по перекрестным связям по ряду причин.
В свою очередь, применение в системе ДУСов по всем трем осям вращения (тангаж, азимут, крен) позволяет заменить трудоемкую процедуру механической выставки положения ДУСа компенсацией перекрестных связей математическим способом.
Для этого нужно установить гиростабилизатор на стенд синусной качки, затем задать качку по одной оси, например по оси Z с заданной скоростью coz и считывать значения выходного сигнала на каждом ДУСе и сложить полученные значения с учетом знака сигнала. Таким образом определяется реальная скорость системы стабилизации.

где β, χ, δ - масштабные коэффициенты каждого ДУСа,
φ - смещение нулевого сигнала,
 - значения угловой скорости ДУСов. Процедура определения масштабных коэффициентов при качке основания выполняется для всех ДУСов поочередно.
- значения угловой скорости ДУСов. Процедура определения масштабных коэффициентов при качке основания выполняется для всех ДУСов поочередно.
Таким образом, при реальной работе системы стабилизации, перекрестная связь, возникающая на ДУСах перпендикулярных осей и приводящая к увеличению значений ошибок стабилизации, будет скомпенсирована введенной поправкой.
Еще одним существенным отличием заявленного изобретения является введение устройства удаления постоянной составляющей сигнала с датчиков угловых скоростей.
При оцифровке аналоговых непрерывных сигналов с датчиков угловых скоростей и использованием АЦП выходная последовательность обычно содержит некоторое постоянное смещение, т.е. среднее значение отсчетов отлично от нуля. Это постоянное смещение может присутствовать в исходном непрерывном сигнале или появиться в результате несовершенства АЦП, к тому же это смещение принимает разное значение при каждом включении изделия.
Независимо от источника, нежелательно смещение сигнала порождает проблемы, ухудшает характеристики системы и повышает частоту ошибок. В гиростабилизаторах постоянное смещение выходного сигнала ДУСа приводит к возникновению ошибки позиционирования системы в установившемся режиме.
Если обработка выполняется не в реальном масштабе времени, и отсчеты сигнала поступают блоками (т.е. последовательностями фиксированной длины) по N отсчетов, то метод устранения постоянной составляющей очевиден: вычисляется среднее значение N отсчетов и вычитается это среднее из каждого отсчета входного блока, получая при этом новую последовательность, постоянная составляющая которой очень мала.
Эта схема, хотя и эффективна, несовместима с обработкой сигналов в реальном масштабе времени, когда обрабатывается непрерывный поток данных.
В системах реального времени для подавления постоянной составляющей используются специальные обрабатывающие устройства.
На фиг. 4 представлена структурная схема гиростабилизатора с использованием звена удаления постоянной составляющей в выходном сигнале датчиков угловых скоростей.
Система стабилизации линии визирования работает следующим образом. Сигнал наведения (13) поступает на устройство сравнения (14), где вычисляется разность между ним и текущим значением от датчика угла (15), которая через корректирующее устройство (16) и усилитель (17), поступает на вход сумматора (18), в котором происходит сравнение полученной ошибки со значением скорости, полученной с датчика угловой скорости (21) и прошедшее обработку в звене удаления постоянной составляющей (19). Получившаяся ошибка поступает на вход звена коррекции (20), представляющего собой регулятор, обрабатывается и передается на вход сумматора (22), в котором сравнивается полученное значение ошибки с измеренным датчиком тока (24) значением тока в фазе электродвигателя (25), получившаяся ошибка поступает на вход усилителя мощности (23), в котором формируется управления двигателя (25), обеспечивая разворот гиростабилизатора так, что разность сигнала приближается к нулю. При этом разворачиваются и соответствующие оптические узлы (стабилизируемая нагрузка) (26), связанные с двигателем, для перемещения или стабилизации положения линии визирования.
С использованием предлагаемого технического решения в ПАО "АНПП" ТЕМП-АВИА" разрабатывается гироскопический стабилизатор прицела комбинированного ГСПК, в котором стабилизация поля зрения по вертикали и горизонтали обеспечивается за счет прямой стабилизации прицельного модуля. Результаты испытаний прототипа подтвердили эффективность предлагаемых технических решений. Ошибка позиционирования, связанная с наличием постоянной составляющей в сигнале с датчиков угловых скоростей, полностью скомпенсирована. Ошибка стабилизации линии визирования при качке основания, вызванная неточностью совмещения системы координат, связанной с измерительными осями датчиков угловых скоростей, относительно системы координат, связанной с линией визирования, не превысила 0,025 мрад.
Источники информации
1. Патент РФ №2260773, МПК G01C 21/18, приоритет от 10.06.2004 г.
2. Патент РФ №2091843, МПК G02B 27/64, приоритет от 09.11.1994 г.
Изобретение относится к двухосным гироскопическим стабилизаторам, размещаемым на подвижных объектах, для получения неподвижного изображения и управления линией визирования оптических приборов. Система стабилизации изображения на подвижном основании содержит индикаторную гироскопическую платформу с установленной на ней стабилизируемой нагрузкой, карданов подвес, гироскоп с датчиками угла, усилительно-корректирующее устройство, представляющее контур стабилизации, содержащий последовательно соединенные корректирующее устройство и усилитель, на вход которого поступает сигнал с устройства сравнения, вычисляющего разность между текущим показанием датчика угла гироскопа и сигналом наведения, сумматор, на вход которого поступает сигнал усилителя и сигнал со звена удаления постоянной составляющей ДУСа, а выход соединен со звеном коррекции, выход которого соединен с сумматором, на вход которого поступает сигнал с датчика тока и выходной сигнал звена коррекции, выход которого соединен с усилителем мощности, выход усилителя мощности соединен с двигателем. При этом система содержит датчики угловых скоростей ДУС, измеряющие угловую скорость стабилизируемой нагрузки по каналам тангажа, азимута, крена, причем выход ДУС соединен со звеном удаления постоянной составляющей, причем двигатель своим первым выходом соединен со входом ДУС, вторым выходом соединен со стабилизируемой нагрузкой, третьим выходом соединен со входом датчика угла и четвертым выходом соединен с датчиком тока. Технический результат - повышение точности стабилизации за счет компенсации перекрестных связей датчиков угловых скоростей (ДУС) и удаления постоянной составляющей из выходного сигнала ДУСов. 4 ил.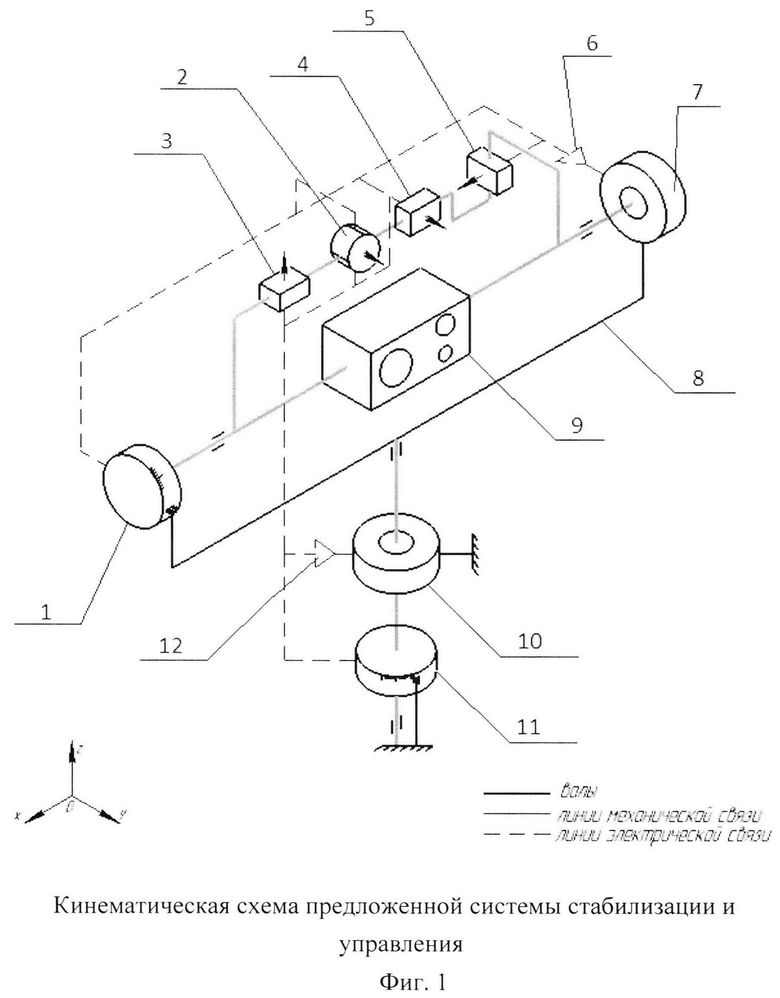
Система стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленной на ней стабилизируемой нагрузкой, карданов подвес, гироскоп с датчиками угла, усилительно-корректирующее устройство, представляющее контур стабилизации, содержащий последовательно соединенные корректирующее устройство и усилитель, на вход которого поступает сигнал с устройства сравнения, вычисляющего разность между текущим показанием датчика угла гироскопа и сигналом наведения, сумматор, на вход которого поступает сигнал усилителя и сигнал со звена удаления постоянной составляющей ДУСа, а выход соединен со звеном коррекции, выход которого соединен с сумматором, на вход которого поступает сигнал с датчика тока и выходной сигнал звена коррекции, выход которого соединен с усилителем мощности, выход усилителя мощности соединен с двигателем, отличающаяся тем, что содержит датчики угловых скоростей ДУС, измеряющие угловую скорость стабилизируемой нагрузки по каналам тангажа, азимута, крена, при этом выход ДУС соединен со звеном удаления постоянной составляющей, причем двигатель своим первым выходом соединен со входом ДУС, вторым выходом соединен со стабилизируемой нагрузкой, третьим выходом соединен со входом датчика угла и четвертым выходом соединен с датчиком тока.
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2004 |
|
RU2260773C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ГИРОСКОПИЧЕСКОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2018 |
|
RU2693561C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2011 |
|
RU2461799C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 1994 |
|
RU2091843C1 |
| RU 2059206 C1, 27.04.1996 | |||
| US 4488249 A1, 11.12.1984. | |||

