Изобретение относится к области гироскопического приборостроения, предназначено для автономного определения истинного азимута ориентированного направления при различных тоногеодезических работах и может найти применение во всех случаях, когда необходимы дистанционный автоматический съем информации с прибора и обработка этой информации на цифровых вычислительных машинах (ЦВМ).
Известные гиротеодолиты, содержащие чувствительный элемент иа торсионном .подвесе с гиромотором и штангой, ненодвижное основание и подвижную часть угломерного устройства, обладают недостаточно высокой точностью.
Предлагаемый гиротеодолит свободен or указанного недостатка и отличается тем, что он снабжен датчиком угла, статор которого закреплен на неподвил ном основании, а ро. тор - на подвижной части угломерного устройства, и дополнительной следяш,ей системой, вынолненной в виде соосно расположенных зеркала, закрепленного на штанге, автоколлиматора и фотооптического датчика, исполнительного двигателя и редуктора, установленных в подвижной части угломерного устройства.
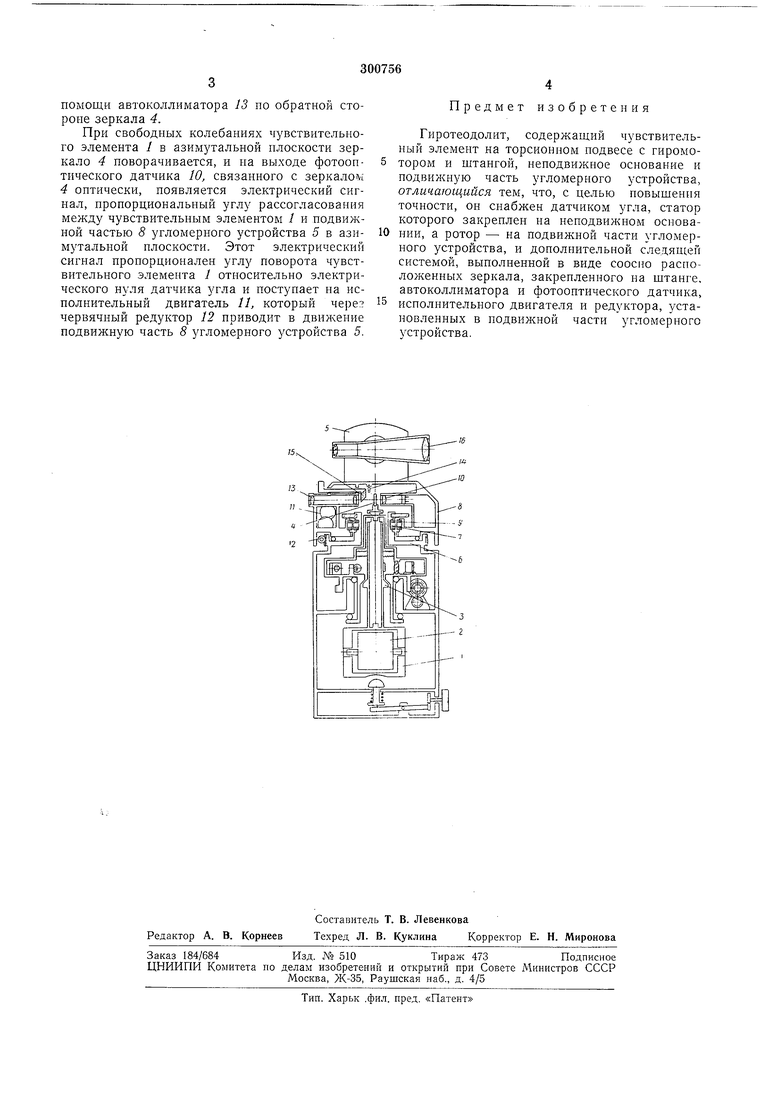
Гиротеодолит содержит чувствительный элемент / с гиромотором 2 и штангой 3, на которой закреплено двустороннее зеркало 4, угломерное устройство 5, состоящее из неподвижного основания 6, па котором закреплен статор 7 датчика угла, и подвижной части 8 (алидады горизонтального круга) с размещенными в ней ротором 9 датчика угла, фотооптическим датчиком JO, исполнительным двигателем //, редуктором 12, автоколлиматором
0 J3, контрольным зеркалом /4 и ромбовидной призмой 5, и зрительную трубу 16.
При наведении зрительной трубы 16 на ориентирный пункт ротор 9 датчика угла разворачивается относительно статора 7 и на выходе датчика угла появляется электрический сигнал, пропорциональный углу поворота подвижной части 5 угломерного устройства 5. В момент окончания наведения.этот сигнал пропорционален углу поворота подвижной части 8 от ее начального полол ;ения, соответствующего электрическому нулю датчика угла, до такого иоложения, при котором ось зрительной трубы 16 совпадает с направле5 пнем на ориентирный пункт. По окончании привязки подвижная часть 8 угломерного устройства 5 разворачивается таким образом, чтобы зеркало 4 оказалось в зоне захвата фотооптического датчика 70. Контроль за осуществлением этой операции производится при
помощи автоколлиматора 13 по обратной сторопе зеркала 4.
При свободиых колебаниях чувствительного элемента / в азимутальной плоскостн зеркало 4 поворачивается, и на выходе фотоонтического датчика 10, связанного с зеркалом 4 оптически, появляется электрический сигнал, пропорциональный углу рассогласования чувствительным элементом / н подвижной частью 8 угломерного устройства 5 в азимутальной плоскости. Этот электрнческнй сигнал пропорционален углу поворота чувствительного элемента / относительно электрического нуля датчика угла и поступает па исполнительный двигатель 11, который чере: червячный редуктор 12 приводит в движение подвижную часть 8 угломерного устройства 5.
Предмет изобретения
Гнротеодолнт, содержащий чувствительный элемент на торсионном подвесе с гиромотором н щтангой, неподвижное основание и подвижную часть угломерного устройства, отличающийся тем, что, с целью повышенпя точности, он снабжен датчиком угла, статор которого закреплен на ненодвил ном основаНИИ, а ротор - на подвижной части угломерного устройства, п дополнительной следящей системой, выполненной в виде соосно расположенных зеркала, закрепленного на щтанге, автоколлиматора и фотооптического датчика, исполнительного двигателя и редуктора, установленных в подвижной части угломерного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гиротеодолит | 1988 |
|
SU1566873A1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| Наземный гирокомпас | 1976 |
|
SU606414A1 |
| МАРКШЕЙДЕРСКИЙ ГИРОКОМПАС | 1970 |
|
SU288320A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Чувствительный элемент гирокомпаса | 1983 |
|
SU1101676A1 |
| АСТАТИЧЕСКИЙ ПОПЛАВКОВЫЙ ГИРОКОМПАС | 1969 |
|
SU252636A1 |
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
«
